







参考资料
《电力拖动自动控制系统——运动控制系统(第3版)》 陈伯时 机械工业出版社
位置随动系统(或称伺服系统),其主要任务是使输出量快速准确地复现给定量的变化。
狭义上,位置随动系统是一个带位置反馈的自动控制系统;
广义上,位置随动系统输出量可以是其它物理量,其共性在于输出量快速准确的复现给定量。
本文讲解狭义上的位置随动系统。
1伺服系统稳态误差分析
伺服系统稳态运行时,要求系统有足够的稳态精度,所产生的稳态位置误差越小越好,为此有必要进行稳态误差分析。
影响伺服系统稳态精度,导致系统产生稳态误差的因素有:
- 检测误差: 包括给定位置和反馈位置传感器的误差,取决于传感器的原理和制造精度,传感器本身固有,无法克服;
- 系统误差: 包括系统造成的给定误差和扰动误差,分别取决于给定输入和扰动输入信号;给定误差值和扰动误差值取决于给定和扰动输入信号的类型。
伺服系统的典型给定输入信号有以下三种类型:
●位置输入(位置阶跃输入):如点位控制的数控机床
●速度输入(斜坡输入):直线插补时的数控机床进给系统
●加速度输入(抛物线输入)雷达追踪空中目标
其单位位置输入给定误差见下表:
| 系统类型 | 单位位置阶跃输入 | 单位速度输入 | 单位加速度输入 |
|---|---|---|---|
| - | R(s)=1/s | R(s)=1/s² | R(s)=1/s³ |
| I型系统 | 0 | 1/K | ∞ |
| II型系统 | 0 | 0 | 1/K |
只要p+q>0,对阶跃输入信号就有足够的跟踪能力;对于速度输入信号,I型系统跟踪能力大幅削弱,跟随误差与开环传递函数的比例系数成反比,II型仍具有优良跟踪能力;对于加速度输入信号,仅II型系统能勉强跟随。
2伺服系统动态矫正与控制
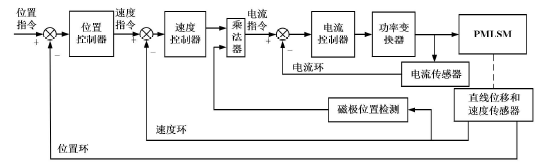
2.1位置、转速、电流三环控制系统
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环和位置环。电流环反应速度最快,速度环的反应速度必须高于位置环,否则将会造成电机运转的震动或反映不良。伺服驱动器的设计可尽量确保电流环具备良好的反应性能,故用户只需调整位置环、速度环的增益即可。
三环就是3个闭环负反馈PID调节系统。
-
第一环为电流环,最内环,此环完全在伺服驱动器内部进行,其PID常数已被设定,无需更改。电流环的输入是速度环PID调节后的输出,电流环的输出就是电机的每相的相电流。电流环的功能为对输入值和电流环反馈值的差值进行PD/PID调节。 电流环的反馈来自于驱动器内部每相的霍尔元件。电流闭环控制可以抑制起、制动电流,加速电流的响应过程。
-
第二环为速度环,中环。速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值。电流环的功能为对输入值和速度环反馈值的差值进行PI调节。 速度环的反馈来自于编码器的反馈后的值经过“速度运算器”的计算后得到的。
-
第三环为位置环,最外环。位置环的输入就是外部的脉冲。位置环的功能为对输入值和位置环反馈值的差值进行P调节。 位置环的反馈来自于编码器反馈的脉冲信号经过“偏差计数器”的计算后得到的。位置调节器APR其输出限幅值是电流的最大值,决定着电动机的最高转速。
APR——位置调节器; ASR——速度调节器; ACR——电流调节器
电流调节器ACR作为内环调节器,在速度环的调节过程中,其作用为使电流跟随给定电压变化;抗电网电压扰动
速度调节器ASR,使转速n很快跟随给定电压Un变化,稳态时可减少转速误差;抗负载扰动
位置调节器APR就是位置环的校正装置,它的类型和参数决定了位置随动系统的系统误差和动态跟随性能,其输出限幅值决定着电机的最高转速。
2.2多环控制系统调节器设计方法
多环控制系统调节器逐环设计方法:从内环到外环,逐个设计各环的调节器。
首先设计电流调节器ACR,然后将电流环简化成转速环中的一个环节,和其它环节一起构成转速调节器ASR的控制对象,再设计ASR;最后再把整个转速环简化为位置环中的一个环节,从而设计位置调节器APR。
- 优势
使每个控制环稳定,保证整个控制系统的稳定性。当电流环和转速环内的对象参数变化或受到扰动时,电流反馈和转速反馈能够及时抑制,将对位置环的工作影响降至最低;同时每个环节都有自己的控制对象,分工明确,易于调整。 - 缺陷
对最外环控制作用的响应不会很快。在设计每个外环时都要将内环等效成其中的一个环节,而等效环节传递函数的成立条件为外环的截止频率远低于内环,这将影响系统的快速性,因此三环控制伺服系统只适用于对快速跟随性能要求不高的场合。















 8391
8391











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









