






1. 重复定位精度是什么
1.1. 标准定义
重复定位精度在国家标准《GB/T 12642-2013 工业机器人 性能规范及其试验方法》[1]中是指位姿重复性(RP, Pose Repeatability),其定义如下:
位姿重复性表示对同一指令位姿从同一方向重复响应n次后实到位姿的一致程度。
1.2. 产品规格
在工业机器人实际设计制造过程中,重复定位精度是非常关键的产品性能指标。以KUKA推出的KR10 R1100-2机器人为例,在产品手册[2]中可以发现其位姿重复精度为±0.02mm。

2. 如何测算重复定位精度
2.1 测试过程
工业机器人以空载、额定速度的条件,n次从同一位姿运动到性能试验所用最大立方体(Cube)的某个顶点位置,等待机器人稳定后[3],使用激光跟踪仪\测距仪\干涉仪等高精度测量设备测得n组机器人末端位置数据。
2.2 计算过程
根据国家标准《GB/T 12642-2013 工业机器人 性能及其试验方法》,重复定位精度的计算过程如下:
其中:
3. 重复定位精度有什么意义
3.1 数学意义
通过以上计算可以发现,重复定位精度的值实际是一个遵循3σ准则的结果。
三西格玛定律是指假设随机分布现象的数据服从正态分布,那么99.7%随机分布的值都在平均值正负三个标准差的范围内。所以严谨地说,机器人作业时两个点之间的欧式距离之差有99.7%的概率小于等于计算出的重复定位精度。
3.2 物理意义
重复定位精度在物理实际中是指:机器人各传动关节在接受停止指令后停止位置的差异。
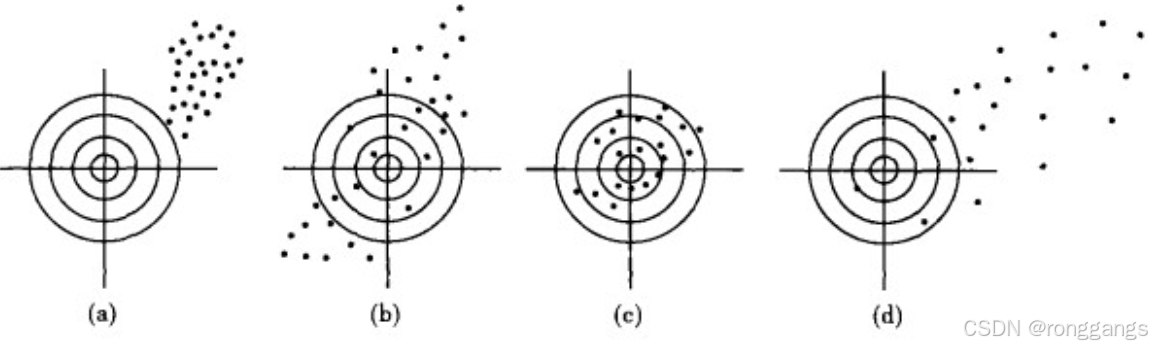
在工业机器人或其他多关节机器人的使用过程中,其作业性能由重复定位精度和绝对定位精度(位姿准确度AP, Pose Accuracy)共同体现。如下图所示,(a)、(c)展示了较好的重复定位精度,(b)、(d)展示了较差的重复定位精度。
[1] 全国机器人标准化技术委员会. 工业机器人 性能规范及其试验方法: GB/T 12642-2013[S]. 北京: 中国标准出版社, 2013
[3] 全国机器人标准化技术委员会. 工业机器人 性能试验实施: GB/T 20868-2007[S]. 北京: 中国标准出版社, 2008

















 8785
8785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









