







目的
这个页面的目的是描述RTK中使用的几何格式,以将一组投影图像与CT扫描几何体相对应。目前只有一种几何格式可用,即ThreeDCircularProjectionGeometry。
单位
几何对象中使用度数存储角度。角度被包装在0到360度之间。
距离的单位没有被强制规定,但是用户有责任保持所有距离(像素和体素间距、几何参数等)的一致性单位。在ITK和DICOM中通常使用毫米作为单位。
图像坐标系统
ITK图像包含信息,可以使用其成员m_Origin、m_Spacing和m_Direction将体素索引转换为物理坐标。RTK中不使用体素坐标,除了用于内部计算。从体素索引坐标到物理坐标的转换以及图像的尺寸超出了本文档的范围。在下文中,“原点”指的是具有坐标itk::Image<>m_Origin、m_Spacing和m_Direction的点,即0 mm(而不是在ITK中的原点)。(指的是经过计算后物理空间上的原地,而不是指itk中的origin)
固定坐标系
RTK中的固定坐标系(x,y,z)是以等中心为原点(0,0,0)的CT扫描坐标系。
ProjectionGeometry
这是一个T Dimension-D CT扫描与(TDimension-1)-D投影图像之间关系的母类。它保存一个(TDimension)x(TDimension+1)投影矩阵的向量,可通过projection_matrices()方法访问。这些矩阵的构造取决于具体的几何形状。
ThreeDCircularProjectionGeometry类用于定义围绕3D层析成像的圆形轨迹上使用平板探测器获取的一组2D投影图像。轨迹不必严格为圆形,但在一些重建算法中假定旋转轴为y轴。几何描述基于国际标准IEC 61217,该标准设计用于等轴射线治疗系统上的锥束成像仪,但可用于任何3D圆形轨迹。RTK的固定坐标系和IEC 61217的固定坐标系相同。
每个投影使用9个参数来定义源和探测器相对于固定坐标系的位置。可以使用方法AddProjection设置这9个参数。对于不是必需的参数提供了默认值。请注意,虽然显式地使用了名称,但这不一定对应于扫描仪返回的值,因为扫描仪可以使用自己的参数化方法。
探测器定向
初始探测器方向
当所有参数设置为0时,探测器与固定坐标系的z方向垂直,类似于IEC 61217中的X射线成像探测器。
旋转顺序
使用三个旋转角度来定义探测器的方向。对于探测器定向,使用欧拉角的ZXY约定,其中GantryAngle是绕y轴的旋转角度,OutOfPlaneAngle是绕x轴的旋转角度,InPlaneAngle是绕z轴的旋转角度。这三个角度在下文中有详细介绍。
龙门角
扫描仪的机架角度。它对应于φg在IEC 2的第3.61217节中:
“g”系统的旋转由坐标轴Xg,Zg的旋转定义φg关于轴Yg(因此关于“f”系统的Yf)。
价值的增加φg对应于龙门架沿水平轴Yf从等心向龙门架的顺时针旋转。
也就是机架绕Y轴的角度
OutOfPlaneAngle
表示垂直于旋转轴并平行于平板的旋转轴的平板的垂直于平面的旋转角度,是可选的,默认值为0。IEC 61217中没有对应的旋转。在旋转转台后,绕x轴的y和z坐标轴的旋转定义了该旋转。当OutOfPlaneAngle增加时,从x轴正方向朝向等中心位置,平板逆时针旋转。InPlaneAngle是二维投影的平面内旋转角度。它是可选的,默认值为0。如果OutOfPlaneAngle等于0,则对应于IEC 61217的θr:
“r”系统的旋转是通过绕Zr(与Zg轴平行)的坐标轴Xr,Yr旋转θr度来定义的。
当角度θr增加时,从辐射源处看,X-射线图像受体逆时针旋转
绕X轴角度
InPlaneAngle
在平面旋转中 2D 投影。它是可选的,默认值为 0。如果 OutOfPlaneAngle 等于 0,则对应于θr在IEC 2的第6.61217节中:
“r”系统的旋转由坐标轴 Xr、Yr 围绕 Zr(平行轴 Zg)的旋转定义,由一个角度定义θr.
角度值的增加θr对应于从辐射源观察的X射线图像接收器的逆时针旋转。
绕Z轴角度
Rotation matrix
旋转矩阵的齐次坐标形式是(采用相反的角度构建矩阵,因为我们旋转的是volume 坐标而不是扫描仪):itk::Euler3DTransform::ComputeMatrix()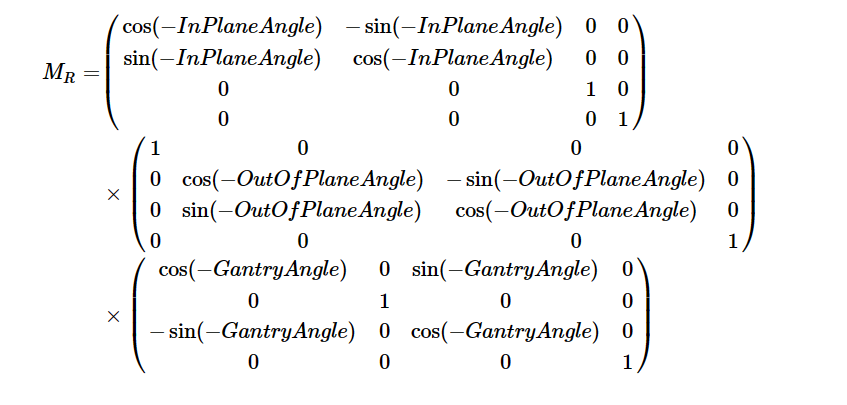
图示
下面的图示描述了当所有值为正数时(但在此几何结构中所有距离都可以为负),在旋转坐标系(Rx,Ry,Rz)中,即根据探测器定向进行取向时,源和探测器位置的参数,其原点位于等中心处:
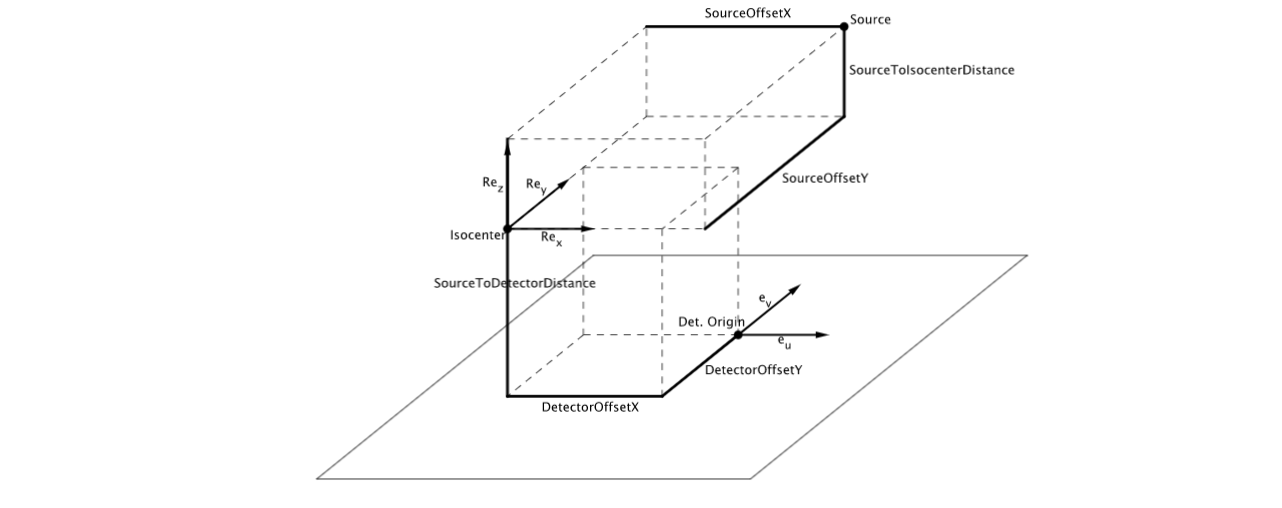
这6个参数用于描述任何源和探测器位置。当所有偏移值都等于0时,更容易理解圆形几何
源位置
源位置与等中心有关,由三个参数 SourceOffsetX、SourceOffsetY 和 SourceToIsocenterDistance 定义。在旋转坐标系中,(SourceOffsetX, SourceOffsetY, SourceToIsocenterDistance) 是源的坐标。在 IEC 61217 标准中,SourceToIsocenterDistance 是辐射源轴距离 SAD。SourceOffsetX 和 SourceOffsetY 是可选的,默认值为零。
探测器位置
探测器位置与源有关,由三个参数 ProjectionOffsetX、ProjectionOffsetY 和 SourceToDetectorDistance 定义。在旋转坐标系中,(ProjectionOffsetX, ProjectionOffsetY, SourceToIsocenterDistance-SourceToDetectorDistance) 是探测器原点 (0, 0) 的坐标。在 IEC 61217 标准中,SourceToDetectorDistance 是辐射源到图像接受区域的距离 SID。ProjectionOffsetX 和 ProjectionOffsetY 是可选的,默认值为零。
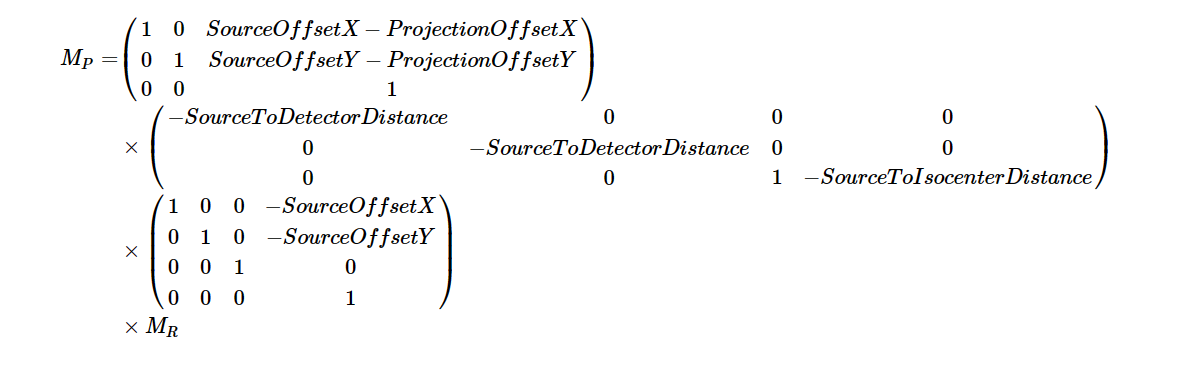
最终矩阵
每个矩阵可通过 GetMatrices 访问,构建方式如下:
探测器半径
除了平板探测器外,RTK中的一些前向和后向投影仪还可以处理圆柱形探测器。圆柱形探测器的半径仅存储一次,作为变量 RadiusCylindricalDetector。RadiusCylindricalDetector的默认值为0,表示探测器是平板(即无限半径,但0更容易处理)。当值不为零时,平面探测器根据半径弯曲,并沿探测器原点定义的线与相应的平面探测器保持切线(0,0)和探测器的第二个轴,无需考虑参数 投影偏移X 和投影偏移 Y。后两者允许修改每个投影的原点,就像平板显示器一样。圆柱形探测器的几何形状如下图所示: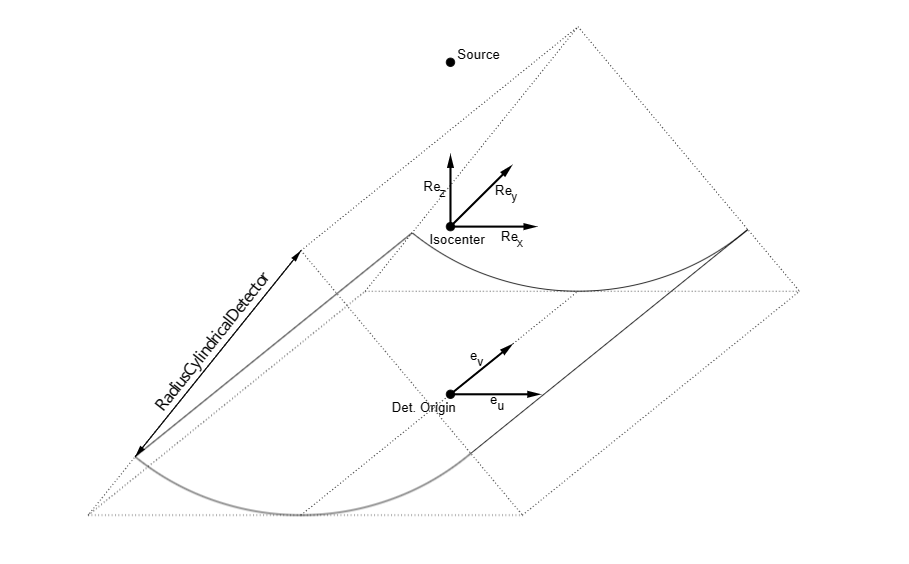
此方案基于前一个方案,所有偏移量都等于 0,但这不是必需的。
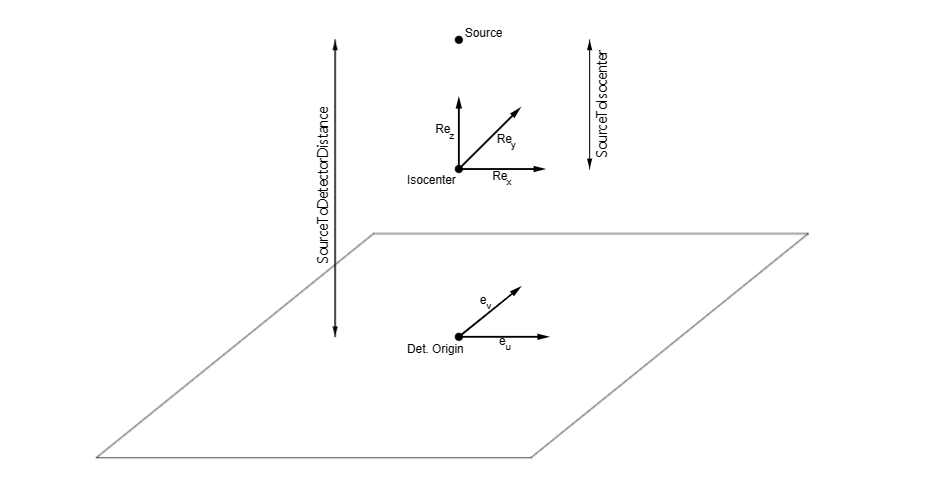
平行几何形状
当SourceToDetectorDistance设置为0时,假定几何图形是平行的(即无限距离,但0更容易处理)。然后检测器是平坦的。光线垂直于探测器平面,探测器平面的方向类似于发散几何形状。(平面)源实际上放置在距等中心的距离处,并且探测器围绕原点对称放置(0,0,0)在同一源到等中心距离。这总结在以下方案中: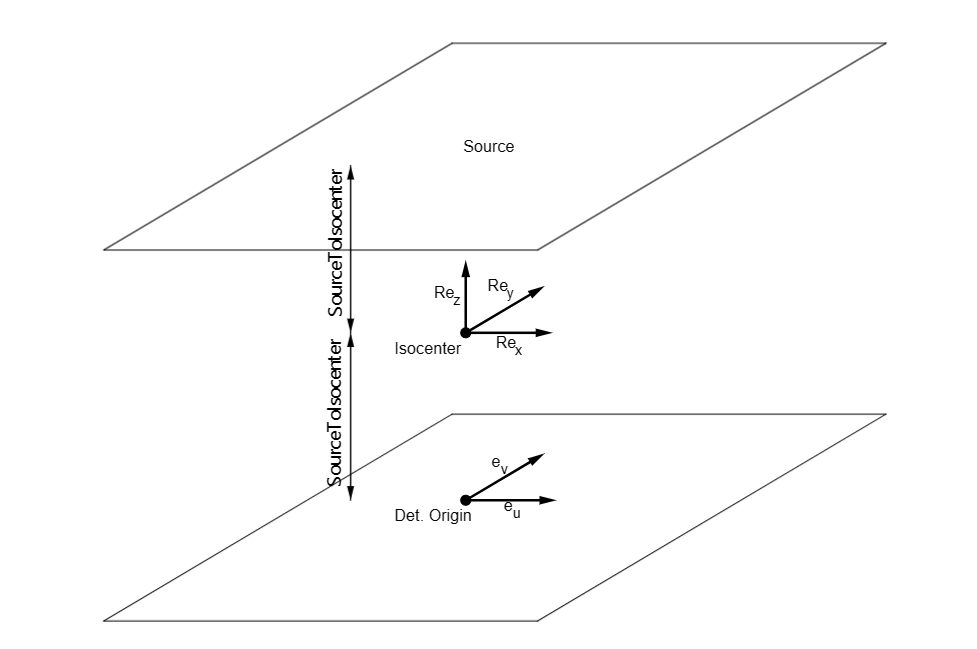
在这种情况下,投影矩阵变为: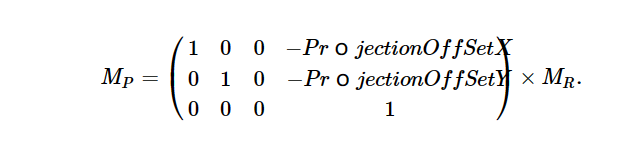
XML 文件
ThreeDCircularProjectionGeometry可以保存并从XML文件加载。如果参数等于所有投影的默认值,则不会将其存储在文件中。如果它对所有投影都相等,但与默认值不同,则存储一次。否则,将为每个投影存储它。给出矩阵仅供参考。读取并检查它是否与参数一致,但手动修改文件必须一致地修改参数和矩阵。下面举一个例子:
<?xml version="1.0"?>
<!DOCTYPE RTKGEOMETRY>
<RTKThreeDCircularGeometry version="3">
<SourceToIsocenterDistance>1000</SourceToIsocenterDistance>
<SourceToDetectorDistance>1536</SourceToDetectorDistance>
<RadiusCylindricalDetector>1536</RadiusCylindricalDetector>
<Projection>
<GantryAngle>271.847274780273</GantryAngle>
<ProjectionOffsetX>-117.056503295898</ProjectionOffsetX>
<ProjectionOffsetY>-1.01195001602173</ProjectionOffsetY>
<Matrix>
-166.5093078829 0 -1531.42837748039 -117056.503295898
-1.01142410874151 -1536 0.0326206557691505 -1011.95001602173
-0.999480303105996 0 0.0322354417240802 -1000
</Matrix>
</Projection>
<Projection>
<GantryAngle>271.852905273438</GantryAngle>
<ProjectionOffsetX>-117.056831359863</ProjectionOffsetX>
<ProjectionOffsetY>-1.01187002658844</ProjectionOffsetY>
<Matrix>
-166.660129424325 0 -1531.41199650136 -117056.831359863
-1.01134095059569 -1536 0.0327174625589984 -1011.87002658844
-0.999477130482326 0 0.0323336611415466 -1000
</Matrix>
</Projection>
</RTKThreeDCircularGeometry>

















 719
719

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









