







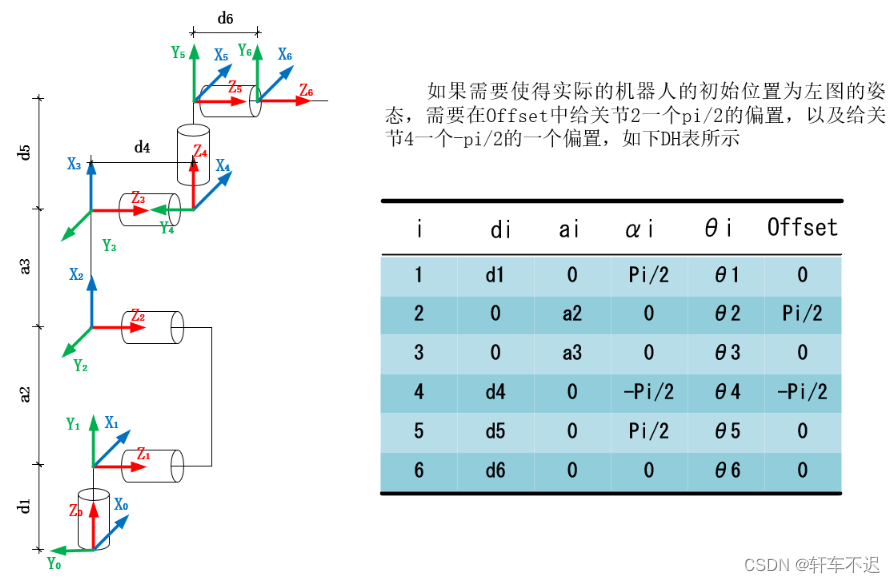
对应的robotics工具箱的matlab代码
%标准DH
%Link(DH,option):
%DH = [THETA D A ALPHA SIGMA OFFSET]
L1 = Link([0 0.1314 0 pi/2 0 0 ],'standard');
L2 = Link([0 0 0.312 0 0 pi/2 ],'standard');
L3 = Link([0 0 0.246 0 0 0 ],'standard');
L4 = Link([0 0.10 0 -pi/2 0 -pi/2 ],'standard');
L5 = Link([0 0.10 0 pi/2 0 0 ],'standard');
L6 = Link([0 0.087 0 0 0 0 ],'standard');
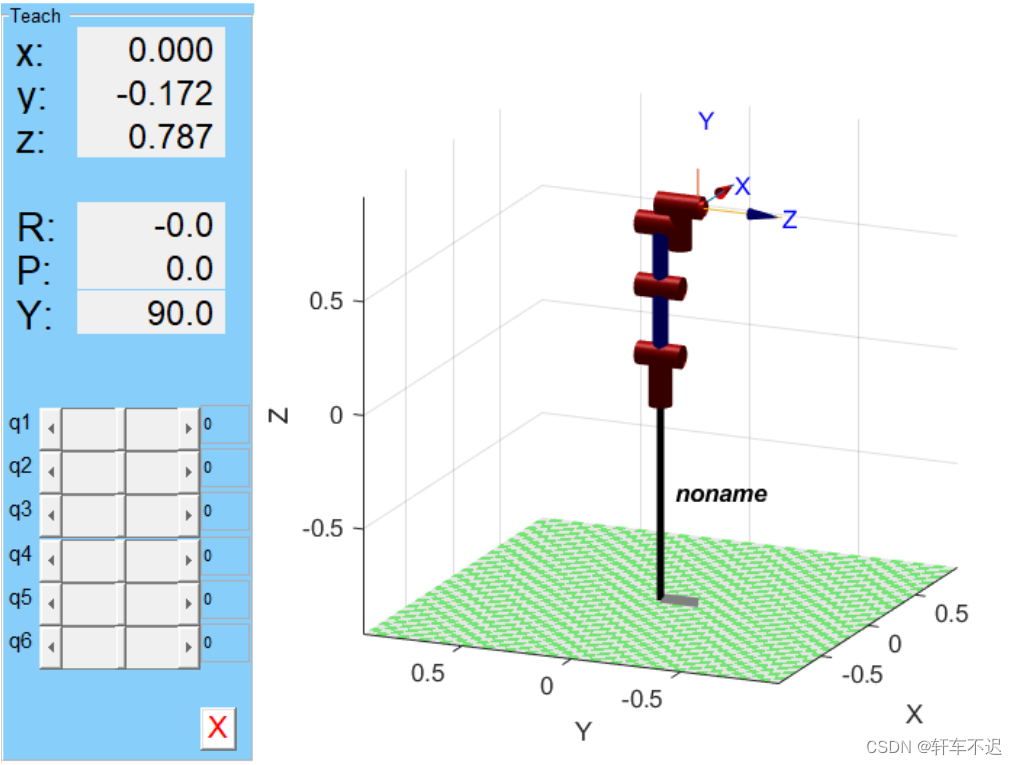
robot = SerialLink([L1 L2 L3 L4 L5 L6]); %建立连杆机器人
robot.plot([0 0 0 0 0 0]) %显示并赋三个关节变量theta值都为0//初始theta
teach(robot)
仿真得到的初始模型如下:















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









