








目录
本文章是基于计算机视觉life课程关于论文的讲解做的相关笔记,建议搭配论文阅读
IV 预处理
A 视觉处理
对图像使用KLT角点检测算法,对角点使用LK光流(在金字塔上逐层进行)追踪(用光流计算最小化光度误差来进行追踪)。对已有特征点进行追踪时,不需要在新一帧图像上提取特征点,但当特征点数较少时,会额外提取特征点来维持一定的数量。每张图片维护大约100-300个特征点。检测出特征点时还会进行均匀化操作(对应于ORB:使用的是四叉树,对应于VINS:每检测出特征点,对特征点进行排序,认为被追踪的越久的特征点稳定性更好,质量更高。以特征点为中心画圈,在圈中不允许再有其他的特征点存在)。提取完特征点后要去畸变,去畸变使用了一个trick:逐渐逼近式去畸变。通过对极约束求一个本质矩阵,使用RANSAC选取一个置信度最高的本质矩阵,对outlier(不符合对极约束的点)进行筛查。
如何选关键帧:
- 视差(对每个追踪的关键点计算 δ \delta δt,计算平均值,比阈值大时)
- 追踪质量(追踪到的特征点数量小于阈值时)
B IMU预积分
- (1)从连续时间基于四元数的预积分开始,进行了一系列建模处理。假设零偏的导数符合高斯分布
- (2)使用旋转向量描述协方差矩阵
- (3)零偏的修复:因为零偏是随机游走的,所以需要实时估计出来。我们认为零偏的变化非常小,所以可以对它进行一阶线性展开近似,求取它的一阶雅克比矩阵。(当 δ \delta δt很大时,一阶线性近似就失效了,就要重新计算,例如IMU初始化结束的时候)但在滑窗就可以这样使用,极大节约计算成本
V 初始化
A 纯视觉struct of motion
对滑窗所有帧做纯视觉单目SFM。首先,对连续两帧图像通过对极约束(五点法+RANSAC)恢复初始的位姿(带有不准的尺度),这两帧需要满足拥有足够多的特征点(超过30个),且特征点的平均视差要足够大(避免纯旋转)(超多20个像素)。
最后做一个FULL BA。
优化之后得到带尺度的3D点位姿和相机坐标。代码中把相机第四帧作为参考帧(和论文不同)
B 视觉IMU对齐
IMU通过预积分得到旋转,相机通过对极约束得到旋转。两个旋转之间差一个旋转外参。对旋转外参构建一个超定方程来进行求解。
- 平移外参没有优化,因为非常难求解。
- 加速度的零偏对最后的优化结果影响非常小,还参杂重力,基于松耦合建模算法不可观,也没有求解。
(1)求解陀螺仪零偏:求解一个超定方程
(2)速度,重力,和尺度
把旋转和重力方向对齐。借助预积分的约束,把已知量放到一边,未知量放到另一边,构造AX=B的方程。累计很多帧构造超定方程。
未知量:
v
b
k
b
k
:
v^{b_k}_{b_k}:
vbkbk:d第k帧图像时IMU坐标系下的速度;
g
c
0
g^{c_0}
gc0:第0帧相机坐标系下的重力向量;s:视觉SFM恢复到米制尺度下的比例
(3)重力调整:
重力的先验信息:重力的大小
具体的修正步骤:
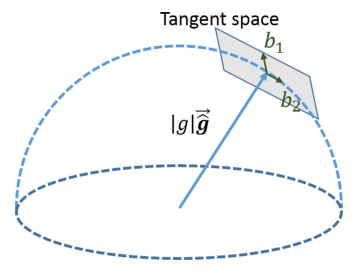
所有重力的大小是不变的,在第二步基础上对重力的方向进行一些调整:在切向空间描述两个b1.b2。实现把对重力的描述由之前的三自由度变为在b1,b2方向上的两自由度的问题。将每次的重力根据b1,b2进行迭代调整(借用第二步重力的初始值,只用了方向,大小使用了先验信息(该维度的重力大小))。
(4)完全初始化:把第一帧图像帧的姿态调整到与重力对齐。(由于我加了重力,所以我们对roll角和pitch角是已知的,但是我们对垂直重力方向的yaw角是未知的,所以我们就把第一帧的yaw角置为0,并对其他帧做依次调整。至此初始化的过程全部结束了。
VI 紧耦合
基于滑窗的紧耦合的VIO
A formulation
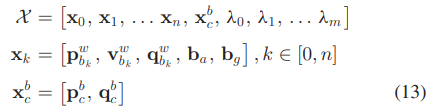
滑窗优化的变量:每一帧的位置,速度和姿态(p,v,q),零偏(b),外参(x),地图点(λ,维护的是地图点的逆深度,绑定滑窗观测到该特征点的第一帧来作为逆深度的参考帧,当滑窗中没有任何关键帧能看到该地图点时将其抹掉,不同于ORBSLAM中的全局三维地图点)
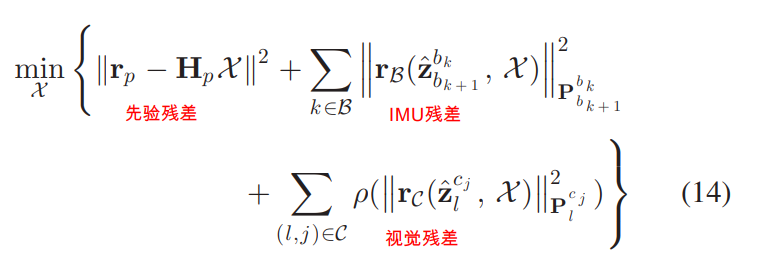
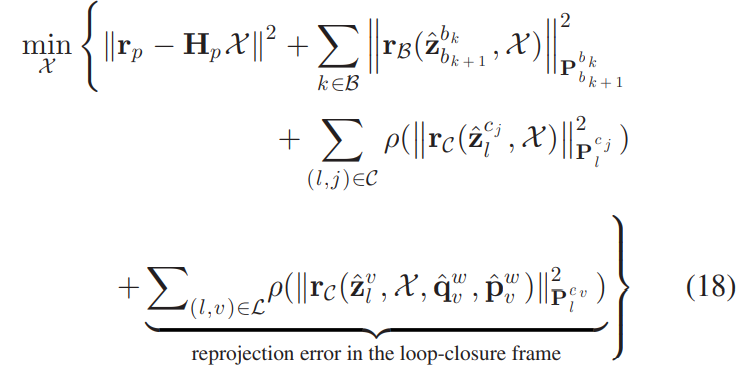
滑窗模型一共有三种残差:
- 第一个是边缘化,提供一个先验的约束;
- 第二个是预积分,提供一个帧间约束(两帧之间状态量的约束);
- 第三个是视觉重投影,基于间接的,基于特征点的经典约束项。因为视觉重投影会存在误匹配,所以需要使用 h u b e r huber huber核函数(当误差逐渐变大,其造成的影响会逐渐降低)
B IMU的约束
![[外链图片转存失败,源站可能有防盗在这里插入!链机制,建描述]议将图片上https://传(imblog.csdnimg.cn/2g06D3E1Kd184627962.png?x-oss-process=image/watermark,type_ZmFuZpoZW3naGVpdGk,shadow_10,text_aHR0cHM6Ly1ibG9nLmNzZG4ubmV0L3dlaXhpbl80NTYyNjcwNg==,size_51,color_FFFFFF,t_702(https://img-blog.csdnimg.cn 0)]](https://img-blog.csdnimg.cn/20210613184655568.png?)
IMU的残差,即IMU的帧间约束。如果系统只使用IMU来进行状态递归,那么(25)式的等号是成立的。但是我们还融入了视觉重投影的约束,所以每次优化下式的状态值(位置,速度,位姿)都会发生改变。当然原则上
α
,
β
,
γ
\alpha,β,γ
α,β,γ作为观测值是不会改变的,以此会形成一个约束,使状态值如论如何改变都不会离观测值太远。
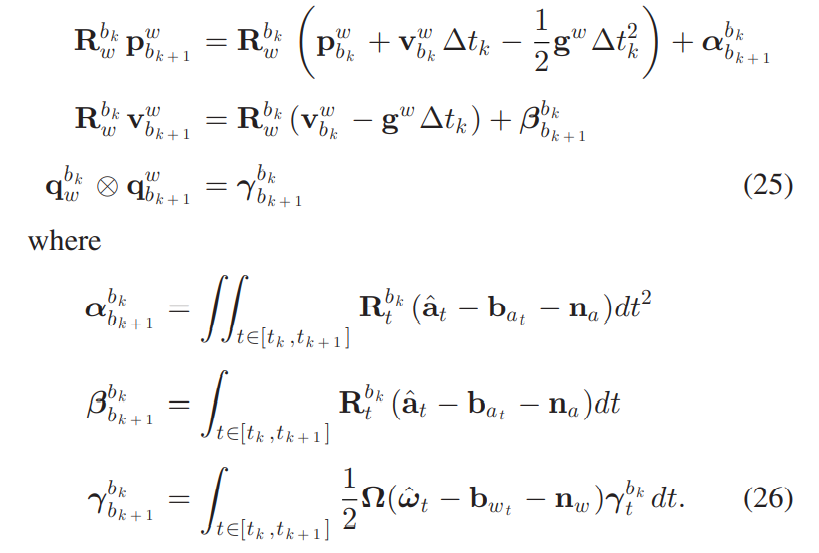
对式(16),因为
γ
γ
γ计算的旋转残差是基于误差模型的,这里只取它的虚部。因为四元数虚部是1/2个旋转向量,所以前面要乘2。
关于零偏的建模:因为IMU的零偏在一段时间内是稳定的,认为两帧的零偏不会差太远,所以对两帧的零偏作差做为一个简单的约束。
C 视觉重投影的约束
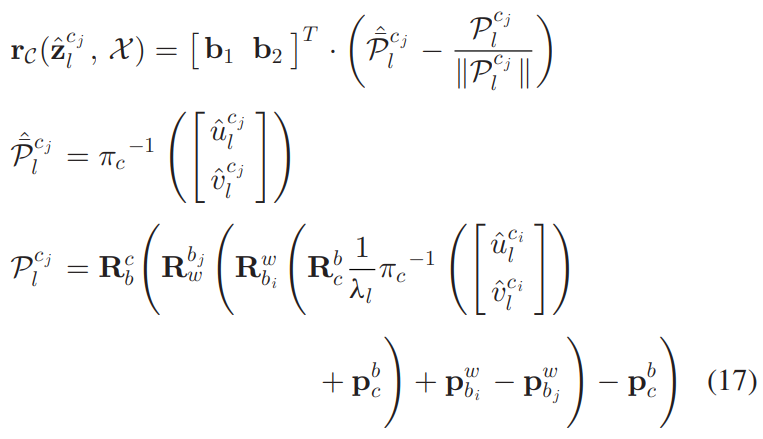
将上一帧观测到的特征点恢复到三维世界,再通过求出的状态量投影到当前帧图像的平面,与实际的特征点做残差计算雅克比矩阵。
D 边缘化
因为滑动窗口的大小是确定的,当来新的一关键帧时需要剔除老帧。利用其对已有状态量的约束固定优化问题,形成一个先验的约束,约束滑窗里其他的状态量。(舒尔补)
E 有限资源平台下权衡
不优化地图点只优化当前位姿
F IMU速率状态估计的IMU正向传播
以IMU的频率发送里程计信息:用最新的滑窗位姿和IMU数据做一个简单的积分,把当前时刻的位姿发送出去。
VII 重定位
回环检测模块,借用了ORB的回环检测方式,回环检测后进行了一个四自由度的优化。
A 回环检测
使用了词袋模型DBoW2,在后端额外提取了 500 500 500个 f a s fas fast角点并计算了特征描述子,然后丢弃原图片来节约内存的空间。
B 特征索引
所有描述子转成词袋的 n o d e node node,做一个历史数据库。每来一个新的关键帧,会提取其角点,计算描述子,查询在历史数据库中是否有与它相似度比较高的关键帧。查询到关键帧的话会进行一系列的 c h e c k check check(描述子匹配,几何校验2D-2D对极约束+RANSAC,3D-2D PNP+RANSAC)
C 紧耦合重定位
把回环相关的约束增加到总约束方程中,并不是为了约束滑窗中的位姿,而是借助滑窗来帮助我得到更精确的当前帧和回环帧之间的
△
p
o
s
e
△pose
△pose。
VII 全局优化
A 四个累积漂移方向
四自由度全局优化,认为 r o l l roll roll和 p i t c h pitch pitch是绝对可观的,不需要去优化。而 x , y , z x, y, z x,y,z,和 y a w yaw yaw是绝对不可观的量,所以我们对 x , y , z x, y, z x,y,z,和 y a w yaw yaw进行一个四自由度的优化。
B 在位姿图中添加关键帧
连续边:表示两关键帧的相对位姿,直接取自VIO
回环边:将回环边的误差分散到各个边中
四位姿图优化
本身两帧之间会算出一个
△
p
o
s
e
△pose
△pose,
△
p
o
s
e
△pose
△pose的边(约束)是不会动的,而约束两头的变量是会变得,每一个边都会约束这条边两头的变量的误差,保证其不能离约束太远。
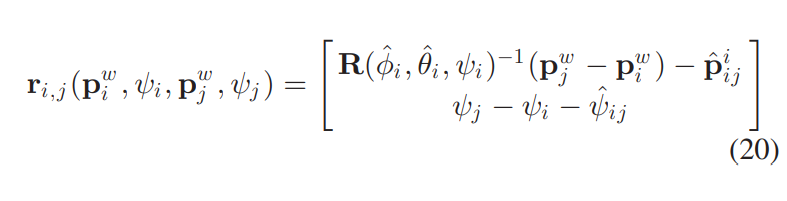
(20)式上半部分是关于位移的约束,下半部分是关于
y
a
w
yaw
yaw角的约束。
由于回环边可能会有误匹配,所以加入核函数来降低优化的风险
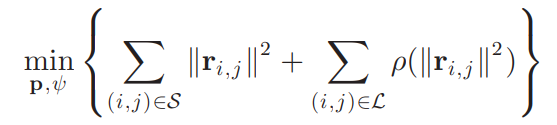
所有的观测都是
△
p
o
s
e
△pose
△pose,所有的优化变量都是位姿。以这样的优化模型进行优化。位姿优化和重投影以两个线程分别进行。
D 位姿图合并
如果我们有一个已知的先验地图,我们可以以回环的方式,把已知的地图融合到当前的地图中来。
E 位姿图的保存

视觉地图的保存只保存一个txt的文本文件。
- i i i: f r a m e frame frame的索引。
- p , q p,q p,q:VIO的位姿
- v v v:有回环的话,对应回环帧的索引
- p ^ i v i , ψ ^ i v \hat{\mathbf{p}}_{i v}^{i}, \hat{\psi}_{i v} p^ivi,ψ^iv:回环帧的位姿
- D D D:所有特征点和描述子
- u , v u,v u,v:特征点的二维坐标
- d e s des des:描述子
















 525
525











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









