







寻找 seek 避开 flee 到达 arrive 追逐 purse 躲避 evade 群落 flock !
效果
转向行为旨在通过使用简单的力来帮助自主角色以逼真的方式运动,这些简单的力结合起来可以围绕角色的环境产生逼真的,即兴的导航。它们不是基于涉及路径规划或全局计算的复杂策略,而是使用本地信息,例如邻居的部队。这使它们易于理解和实施,但仍然能够产生非常复杂的运动模式。
群落效果:
追逐偏移:
视频预览[欢迎关注,获得最新研究成果]:
实现
实现转向行为抓住以下两个点:
转向力
周围角色对象
角色类需要包含以下几个基本属性:
位置
速度
转向力
每帧根据合力与加速度,速度与位置的关系,更新位置。
this._steeredForce.multiplyScalar(1 / this.mass)
this.velocity.add(this._steeredForce)
this._steeredForce.set(0, 0)
this._position.add(this.velocity)
每种行为,都会算出有个期望速度,根据这个期望速度算出一个转向力加上去即可。
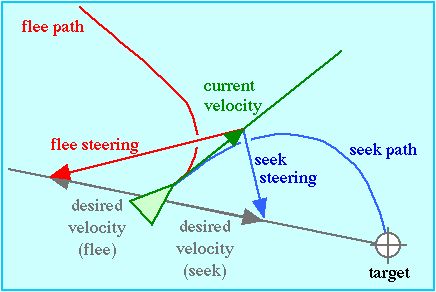
寻找 seek 与 避开 flee
寻找的期望速度直接指向目标点,转向力是期望速度减去当前速度。避开正好相反。
seek(target: Vec2): void {
const desiredVelocity: Vec2 = Vec2.subtract(temp_v2, target, this._position).normalize()
desiredVelocity.multiplyScalar(this.maxSpeed);
const force: Vec2 = desiredVelocity.subtract(this.v 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 208
208











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









