









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
分数阶微积分理论在很多方面相比整数阶微积分理论具有一定的优越性[4
~
7]
将
PID
控制与分数阶微积分理论相结合,针对PID
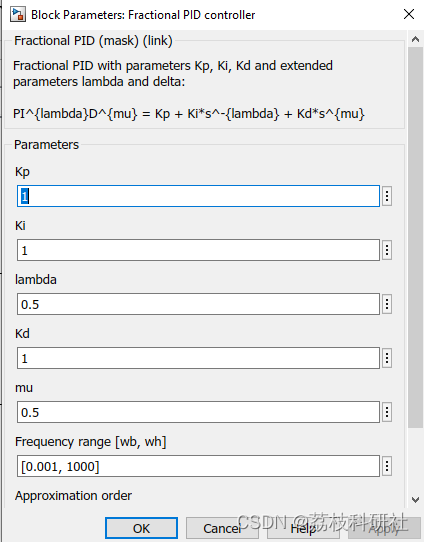
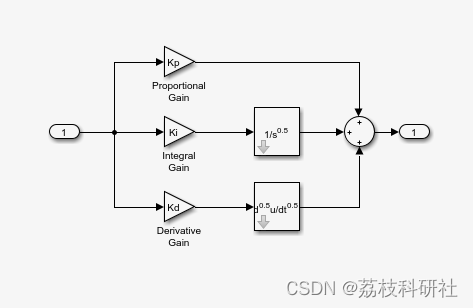
中存在的不足和问题,利用分数阶微积分理论的“记忆”特性等性能,采用分数阶PID
控制器控制分数阶被控系统或者整数阶系统时,分数阶PID控制器比整数阶PID
控制器多了积分阶次与微分阶次两个可改变的参数,提高了系统参数设置的灵活性,可以获得更好的动态品质。但如何找到这些参数的最佳值比较困难,目前PID参数整定方法主要有两种,一种是经
验整定法,另一种是智能整定方法。而遗传算法是一种新型的、模拟生物进化机制的随机化搜索和优化方法,具有并行计算、全局收敛、编码操作,易于与问题结合,便于运算等特点,这些特点使得将其运用于分数阶PID 参数的优化是可行的。
遗传算法(
Genetic Algorithm
,
GA
)是建立在自然选择原理和自然遗传机制上的迭代式自适应概率性搜索方法,它能够模拟自然界中生物进化的发展规律,对特定目标实现自动优化。
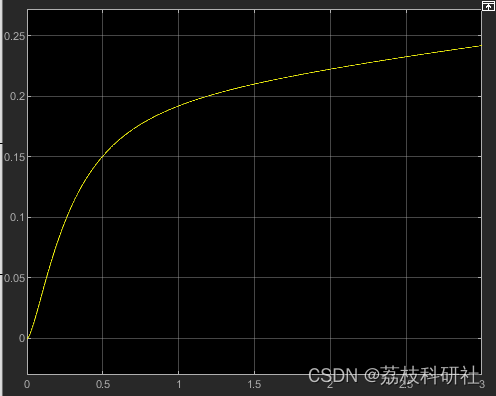
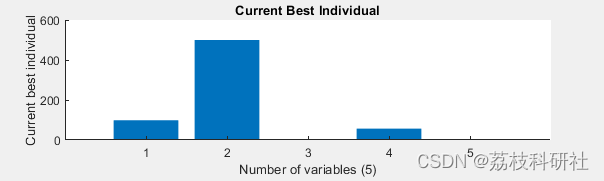
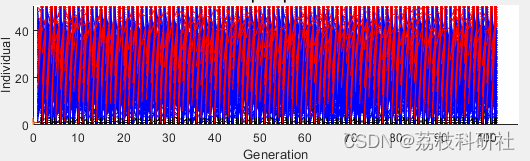
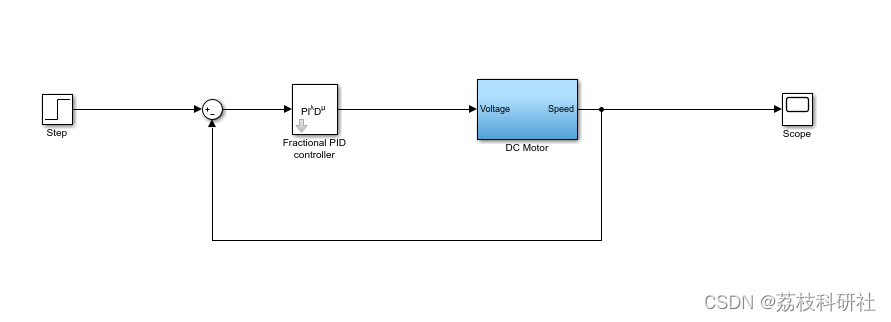
本文基于遗传算法调谐分数阶PID控制直流电机速度研究。
📚2 运行结果

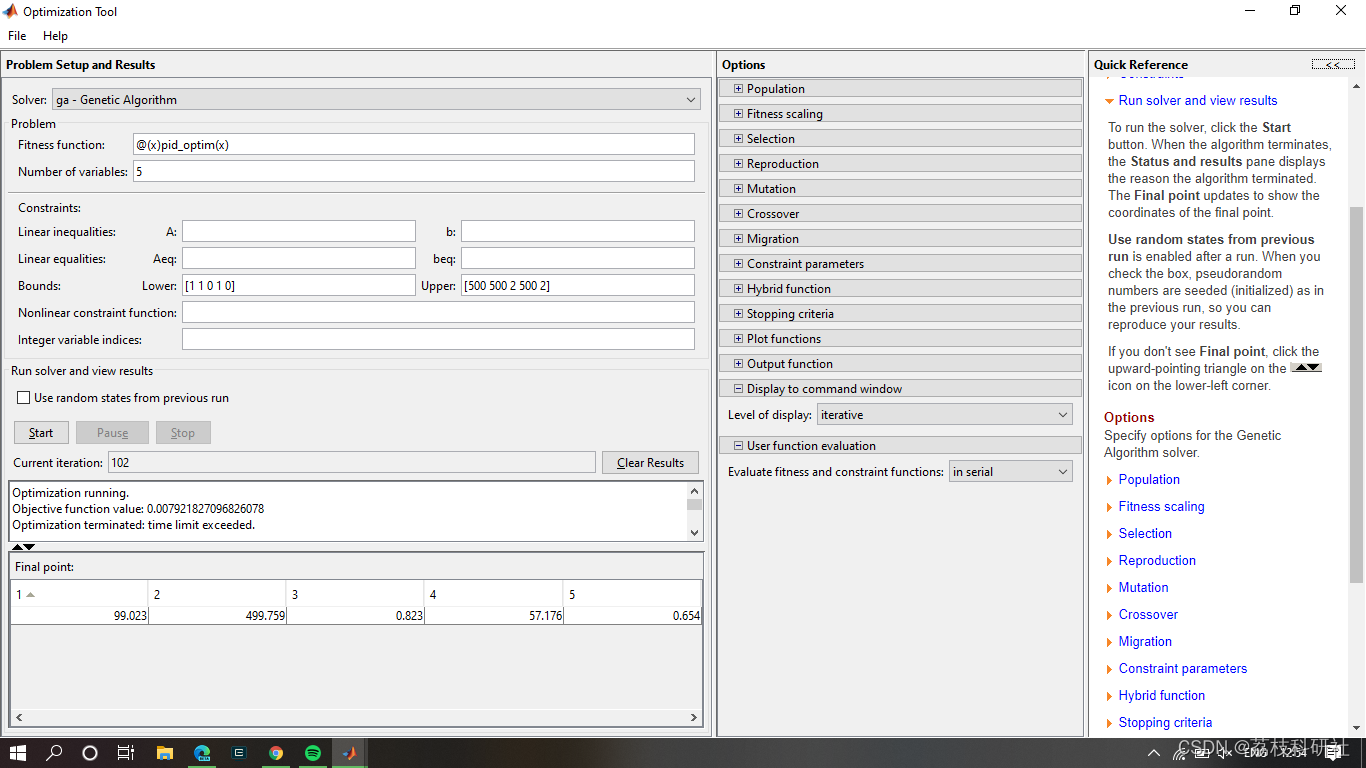


部分代码:
function [J] = pid_optim(x)
s = fotf('s');
j = 0.01;
b = 0.1;
K = 0.01;
R = 1;
L = 0.5;
P_motor = K/((j*s+b)*(L*s+R)+K^2);
Kp = x(1);
Ki = x(2);
Ld = x(3);
Kd = x(4);
Mu = x(5);
cont = fracpid(Kp,Ki,Ld,Kd,Mu);
step(feedback(P_motor*cont,1));
dt = 0.01;
t = 0:dt:1;
e = 1 - step(feedback(plant*cont,1),t);
J = sum(t'.*abs(e)*dt);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]陈炎冬,杨敏,许轰烈,刘洁.采用遗传算法参数整定的车辆ABS分数阶PID控制[J].制造业自动化,2018,40(01):24-27+39.
















 168
168











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











