






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
机器人路径规划是指在机器人导航和运动控制中确定从起始位置到目标位置的最佳路径的过程。这个过程涉及到考虑到机器人的动力学、环境中的障碍物以及可能的运动限制,并且需要在保证安全和有效性的前提下完成。机器人路径规划算法通常分为全局路径规划和局部路径规划两个阶段。全局路径规划确定机器人从起始位置到目标位置的高层路径,而局部路径规划负责在局部范围内生成具体的机器人运动轨迹。机器人路径规划广泛应用于自动驾驶、无人机导航、工业机器人、服务机器人等领域,为机器人在不同环境中安全、高效地移动提供支持。机器人路径规划是一项关键的技术,通过使用各种算法和方法,使机器人能够在复杂的环境中自主导航,完成各种任务。
📚2 运行结果
主函数部分代码:
clear
close all
clc
% number of nodes
ns=100;
map=map_definition();
%
% generate random nodes
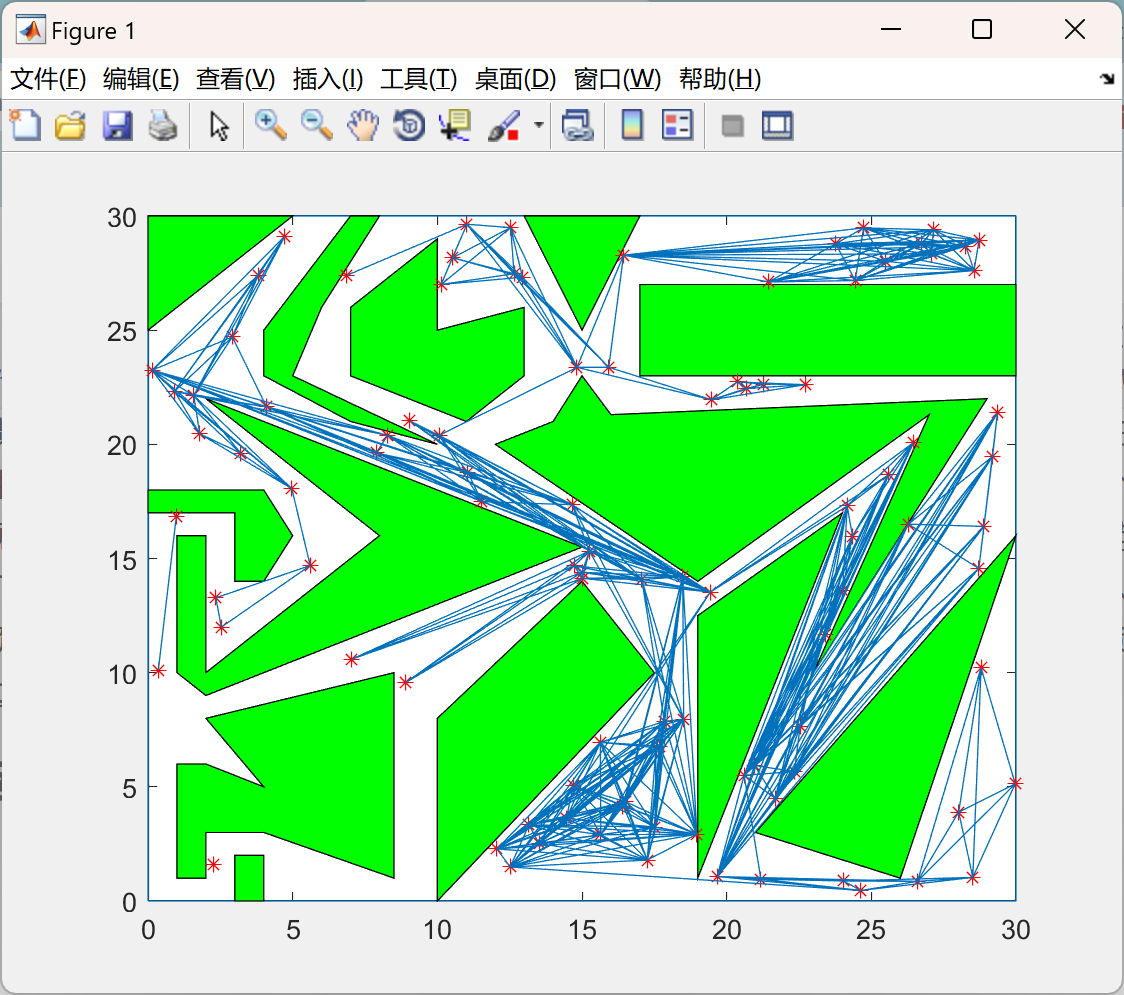
[map, nodelocation]= generate_node(map,ns);
% create undirected graph and its edges
[undirectedGraph,unedges]=generate_undirected_graph(map,nodelocation);
% define start and end point of simulation
startp=[5, 29];
endp=[29, 20];
% add start and end location as a new 2 nodes in undirected map.
% n+1 th node is start point, n+2th node is end point
[extungraph,exnodelocation,exunedges ]=addstartendpoint2ungraph(map,undirectedGraph,nodelocation,unedges,startp,endp);
exundnodIndex=[1:ns+2];
snodeund=ns+1;
enodeund=ns+2;
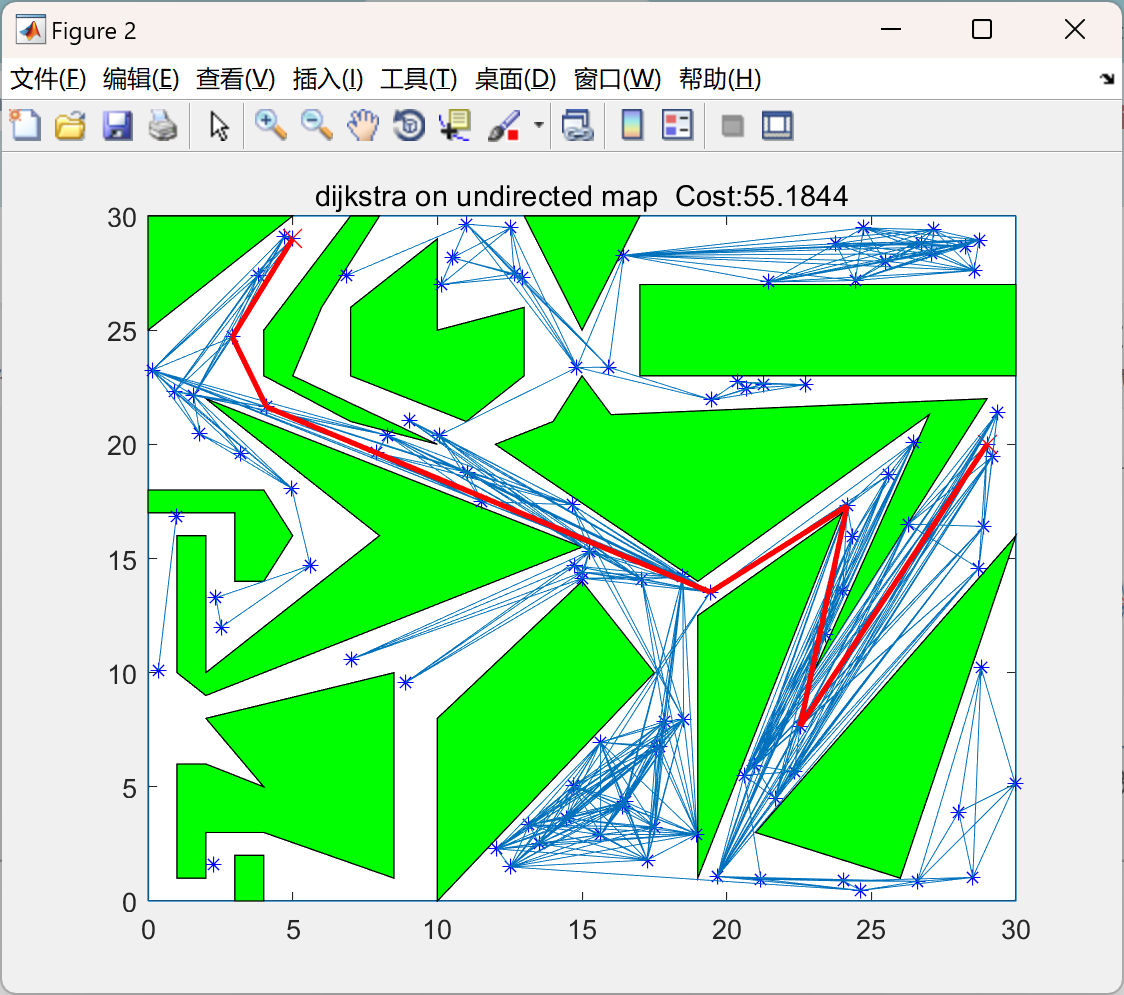
% optimal path with dijkstra on un-directional map
[Route Cost] = dijkstra(extungraph,exnodelocation,snodeund);
rt=Route{enodeund};
dijkstra_route=exnodelocation(rt,:);
cost=pathcost(dijkstra_route);
drawRoute('dijkstra on undirected map',snodeund,enodeund,exnodelocation,exundnodIndex,exunedges,rt,cost);
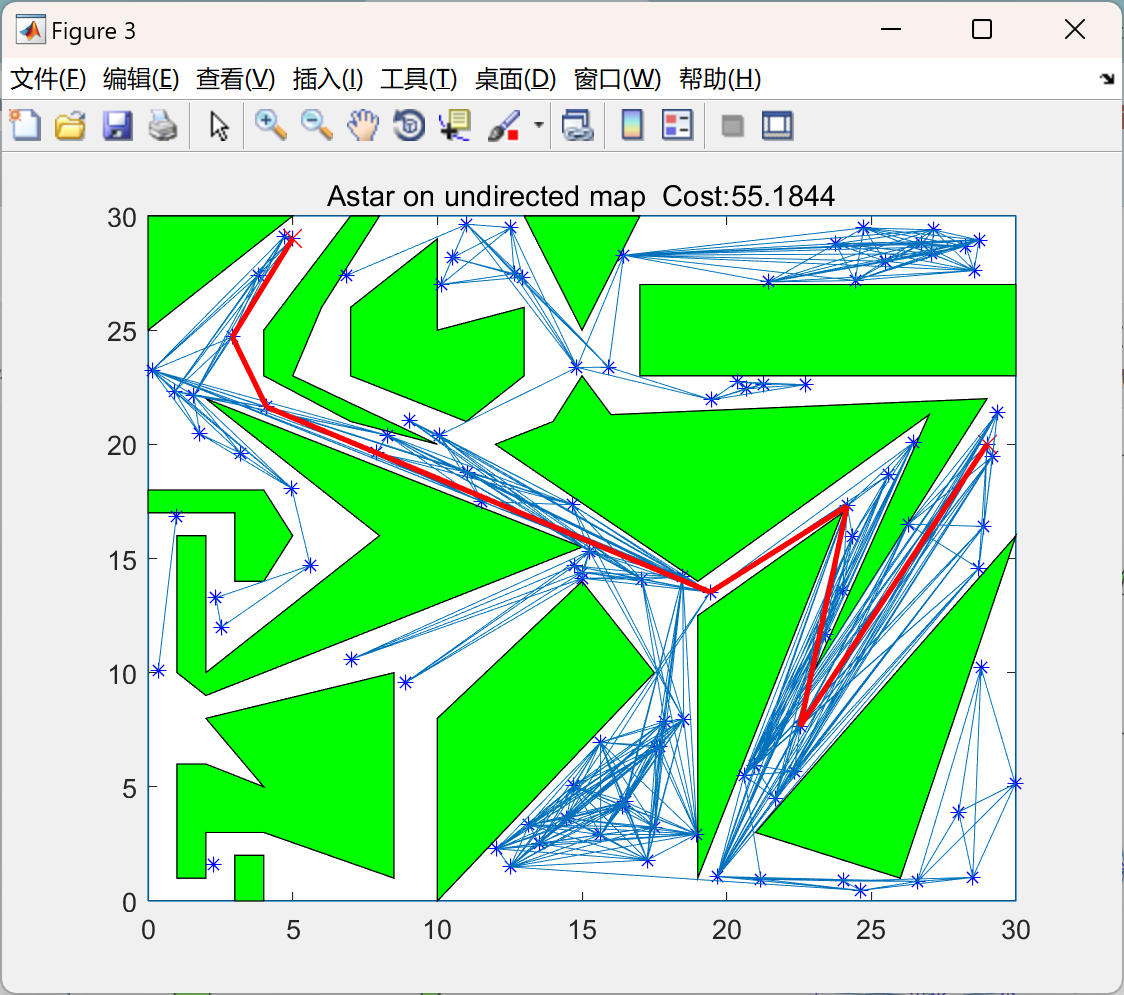
% optimal path with astar on un-directional map
[Route] = astar(extungraph,exnodelocation,snodeund,enodeund);
astar_route=exnodelocation(Route,:);
cost=pathcost(astar_route);
drawRoute('Astar on undirected map',snodeund,enodeund,exnodelocation,exundnodIndex,exunedges,Route,cost);
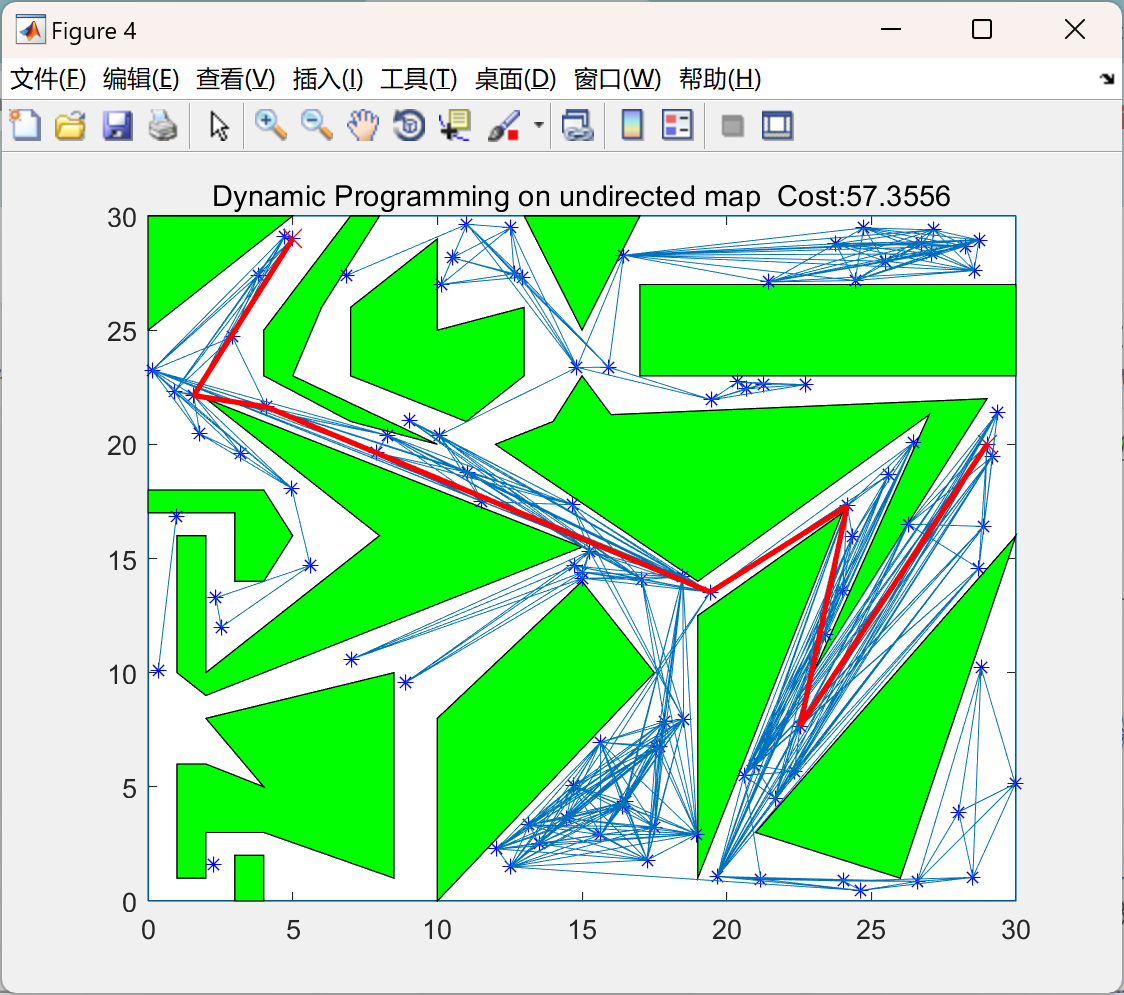
% optimal path with dynamic programming on un-directional map
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]牛乃平,翟德华,季海涛.改进鲸鱼优化算法在矿用巡检机器人路径规划中的应用[J].煤矿机械,2024,45(06):215-217.DOI:10.13436/j.mkjx.202406061.
[2]郭小莹,赵淑苹.机器人路径规划中的算法研究综述[J/OL].无线电工程:1-9[2024-05-29].http://kns.cnki.net/kcms/detail/13.1097.TN.20240527.1145.002.html.
🌈4 Matlab代码实现


















 3990
3990











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











