






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
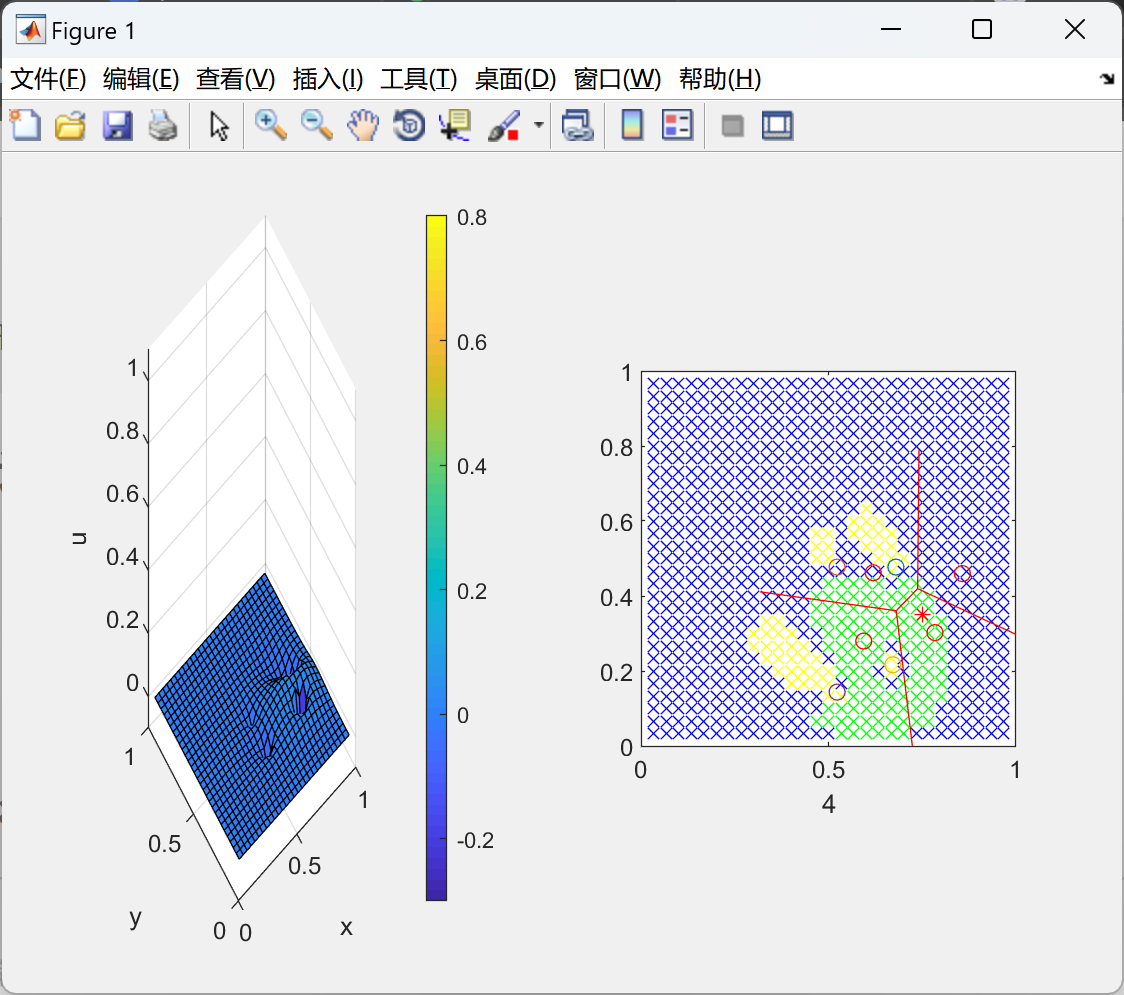
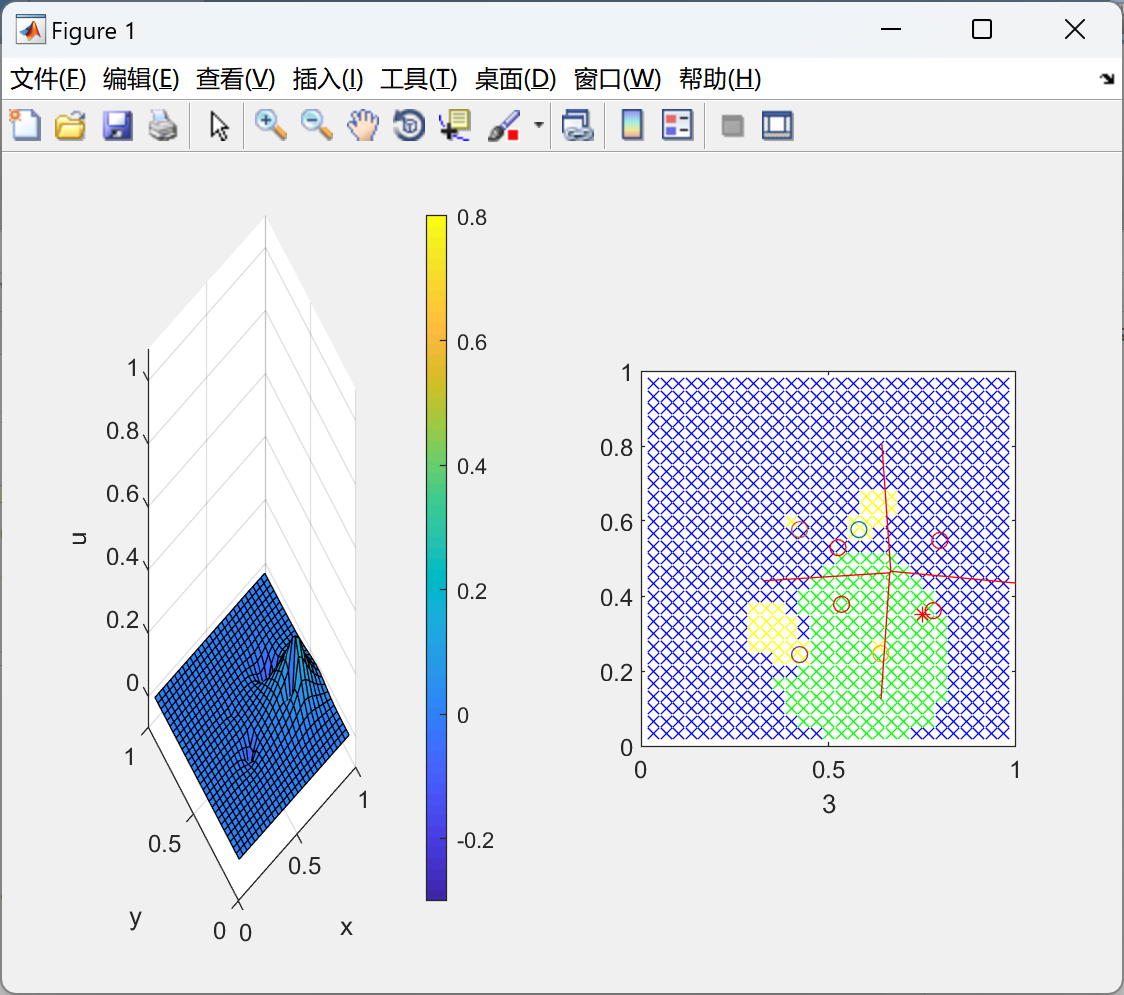
一个用于控制异常扩散过程的数值仿真平台,包含使用FO-Diff-MAS2D解决二维分数扩散方程并获得异常扩散过程的分数控制问题的数值仿真所必需的基本功能。
参考文献1:
扩散过程分布反馈控制中的最优动态执行器位置

摘要:本文讨论了二维毒性扩散过程的分布式中和问题。扩散过程通过抛物型偏微分方程系统进行建模。一组可以释放中和化学物质的移动机器人被派遣去清除污染。我们试图使用质心沃罗诺伊剖分来解决最优执行器位置问题。本文还介绍了一种用于分布参数系统中测量调度和控制的新的仿真平台(Diff-MAS2D)。仿真结果显示了我们提出的方法的有效性。
关键词:执行器网络、网格传感器、扩散过程、污染中和、质心沃罗诺伊剖分、分布参数系统仿真。
随着大规模集成电路设计、可靠性和节能的无线通信技术的进步,在广阔区域部署许多小型移动机器人进行空间环境监测和控制变得更加现实。驻扎在犹他州立大学的CSOIS的移动执行器/传感器网络(MASnet)项目是一个利用小型移动机器人进行空间分布式扩散过程监测和控制的项目(Moore等,2004年;陈等,2004年;王等,2004年)。该项目将移动机器人与无线传感器网络相结合。每个机器人的感知能力和通信能力有限。它们被期望相互协调,通过时空反馈闭环控制来控制扩散过程。该项目的应用可以用于国土安全,化学、生物、放射性或核恐怖主义可能造成毁灭性破坏的领域。因此,拥有一个能够响应和控制有害物质扩散过程的系统至关重要。一些研究挑战和机遇在(Moore和陈,2004年)中提出。
本文考虑了MAS-net项目中的污染中和问题。情景描述如下:一个有毒扩散源在二维平面释放有毒物质。扩散过程被建模为一个抛物型偏微分方程(PDE)系统。化学浓度传感器被部署以覆盖受污染区域,并收集有关污染的数据。然后,一些配备有可控释放中和化学物质的移动机器人被派往受污染区域,任务是通过适当释放中和化学物质来消除污染。本文试图解决的问题是如何选择这些机器人的最佳位置以及机器人在动态扩散过程演化时将遵循的轨迹。
参考文献2:

摘要
本文提出了一种基于无人机的最优作物喷洒方法,用于控制作物的异常扩散害虫。我们考虑了两种异常扩散模型,分别是时间分数阶扩散方程和空间分数阶扩散方程。我们的问题形式化受到了实时虫害管理的启发,该管理利用网络化的无人机喷施器,其中虫害的传播被建模为分数阶扩散方程。我们试图通过使用质心沃罗诺伊剖分来解决执行器的最佳动态位置问题。本文还介绍了一种用于分数阶分布参数系统中测量调度和控制的新仿真平台(FODiffMAS-2D)。通过展示仿真结果,我们展示了所提出的方法的有效性以及分数阶在整体控制性能中的作用。
关键词:异常扩散过程、质心沃罗诺伊剖分、分布参数系统仿真、分数阶扩散方程
📚2 运行结果
部分代码:
out_des=zeros(NA,2);
sum_s_des=zeros(NA,1);
controlTime_des=0;
% Added by Sean Rider for Standard Crop Dusting
% global q dir;
% q = 1;
% dir = 1;
%%%%%
initialization1
init_check
resp = '';
% while isempty(findstr('yn',resp))
% resp = input('Are the initial conditions and boundary conditions what you want (y,n)? ','s');
% resp = lower(resp);
% end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] Chen, YangQuan, Zhongmin Wang, and Jinsong Liang. "Optimal dynamic actuator location in distributed feedback control of a diffusion process." International Journal of Sensor Networks 2.3 (2007): 169-178.
[2]Cao, Jianxiong, YangQuan Chen, and Changpin Li. "Multi-UAV-based Optimal Crop-dusting of Anomalously Diffusing Infestation of Crops." arXiv preprint arXiv:1411.2880 (2014).
🌈4 Matlab代码、数据、文章
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 569
569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











