






💥💥💥💞💞💞欢迎来到本博客❤️❤️❤️💥💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
💥1 概述
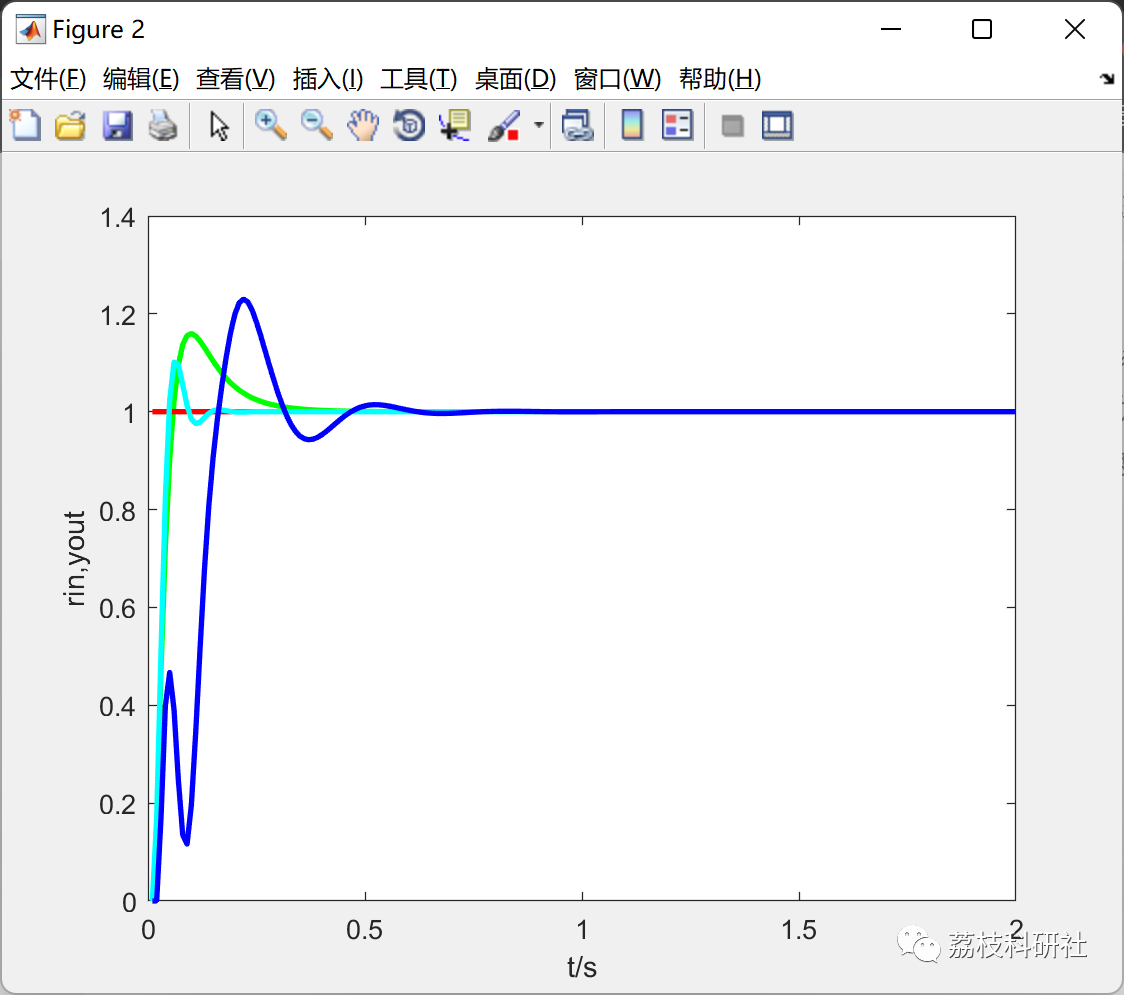
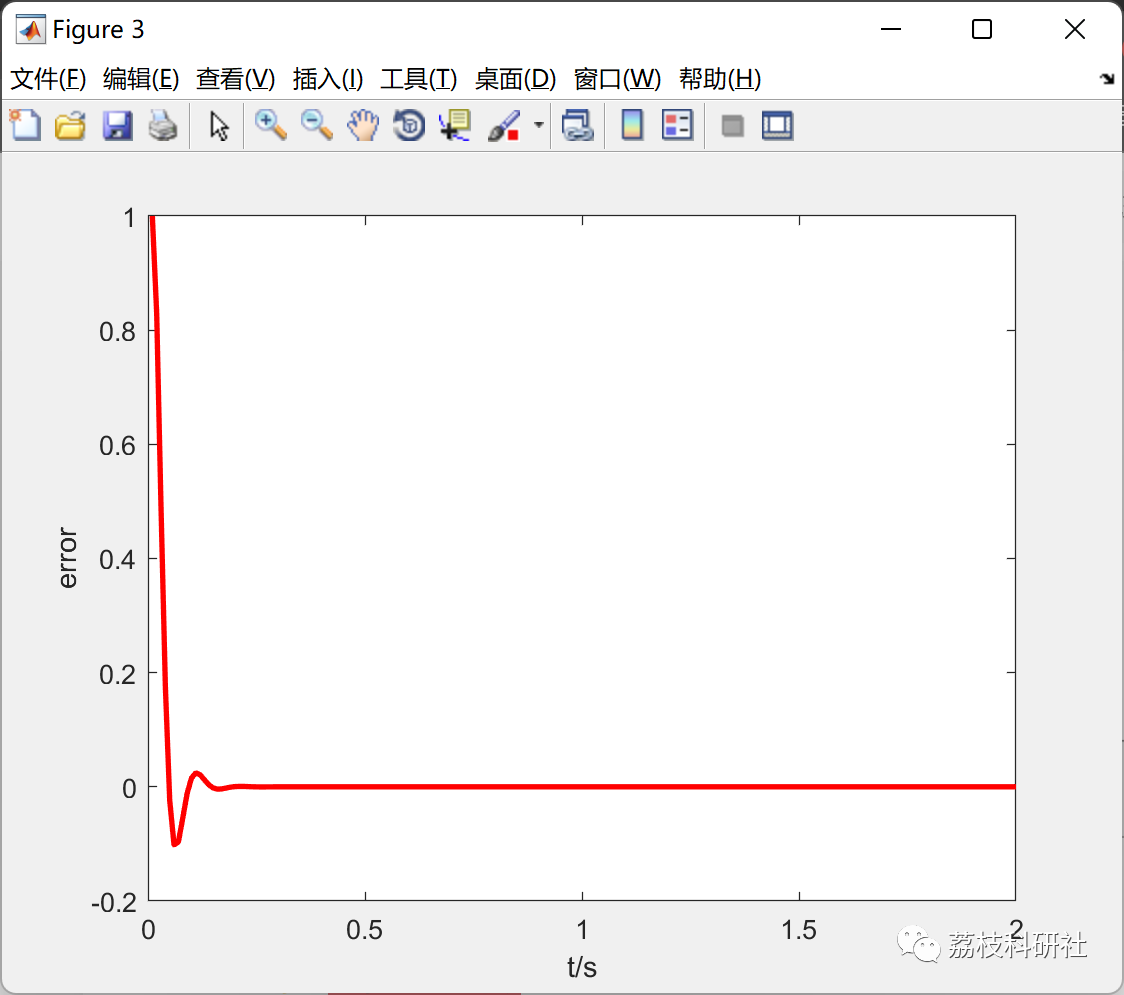
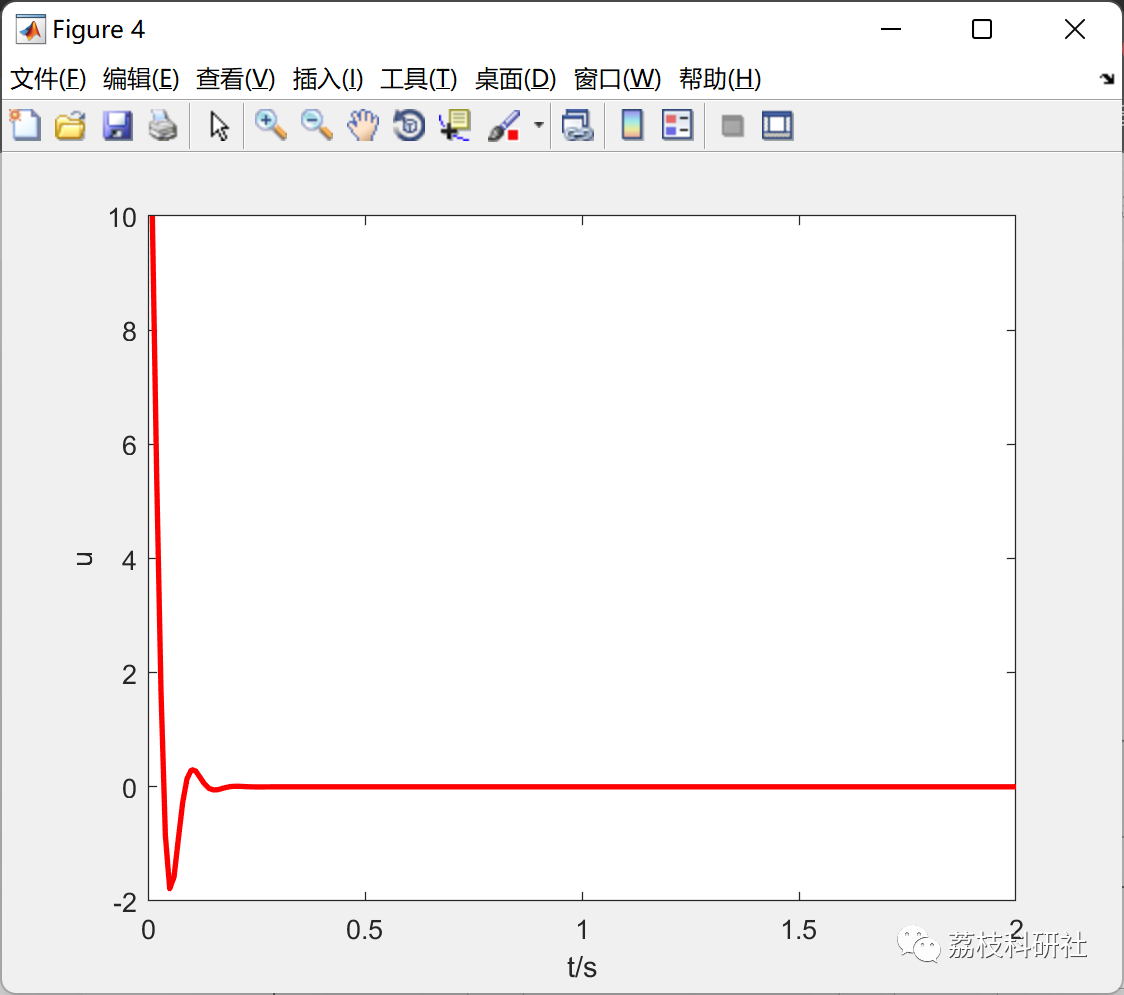
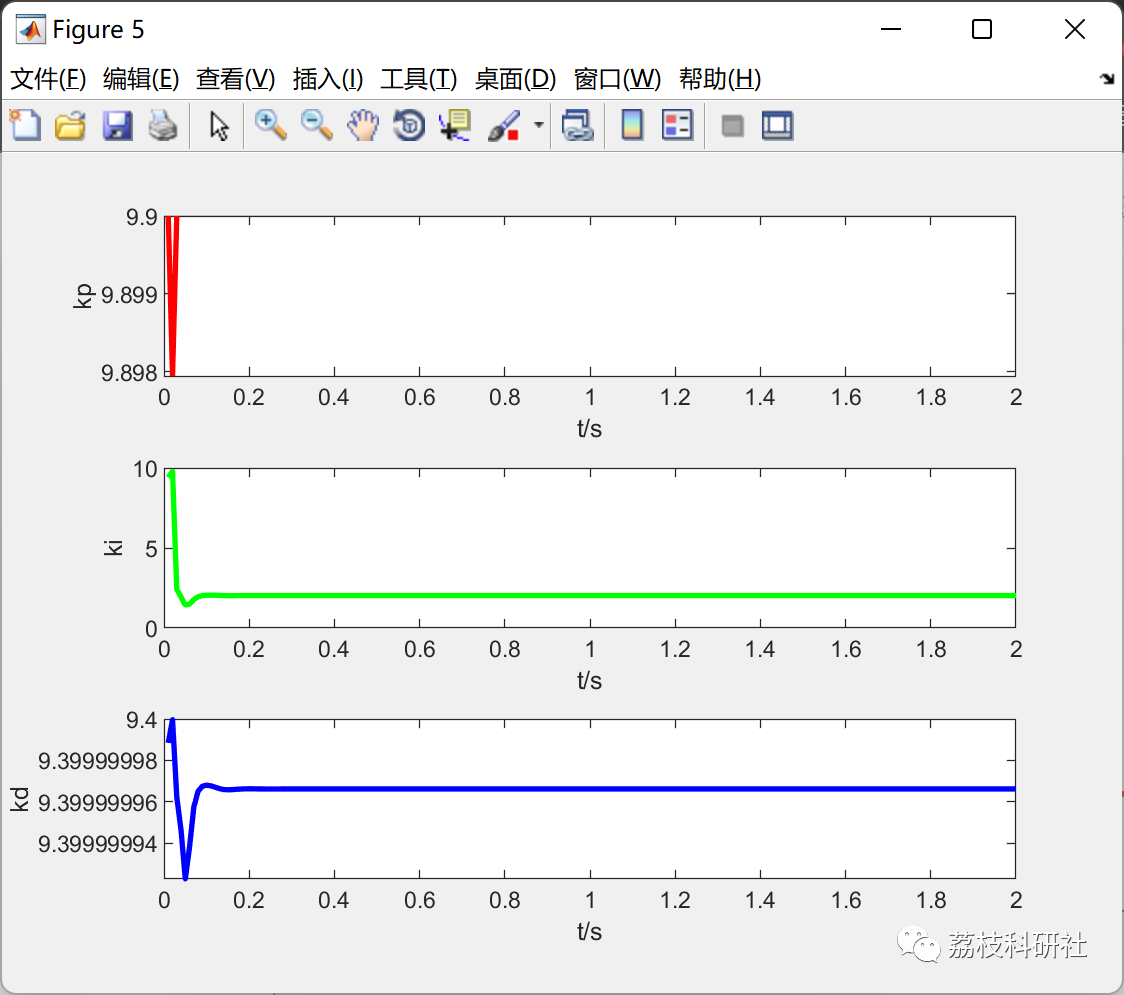
传统比例-积分-微分(Proportion Integral Derivative,PID)控制器存在参数整定困难,不能在线实时调整以及面对复杂非线性系统时应用效果不佳等问题,提出一种基于粒子群算法(Particle Swarm Optimization,PSO)优化的反向传播(Back Propagation,BP)神经网络PID控制方法。将BP神经网络与PID控制器相结合,利用BP神经网络的自适应学习能力在线实时调整PID控制参数,提升系统稳定性,针对BP-PID自学习过程中容易陷入局部极小值问题,利用改进的PSO算法对其进行优化,确保BP-PID系统收敛于全局最优解。基于仿真数据开展实验,结果表明,所提方法能够有效提升系统的控制精度和控制稳定度。
基于粒子群算法(Particle Swarm Optimization, PSO)优化BP(Back Propagation)神经网络的PID控制算法是一种结合智能优化技术和传统控制方法的先进方案。在这一方法中,PSO 用于优化 BP 神经网络的权重和偏差参数,然后利用优化后的神经网络设计 PID 控制器的参数。这种方法能够提高 PID 控制器的性能,如快速响应和更好的鲁棒性。
关键步骤
1. **初始化粒子群和网络参数:**
- 设定粒子数量、最大迭代次数、惯性权重以及个体和全局学习因子。
- 初始化 BP 神经网络的结构,包括输入层、隐藏层和输出层的节点数。
2. **粒子编码和初始化:**
- 每个粒子编码表示 BP 神经网络的权重和偏差(或者直接编码 PID 控制器的参数)。
- 初始化粒子的位置和速度。
3. **适应度函数设计:**
- 选择适当的适应度函数来评估每个粒子的优劣。适应度函数通常基于控制系统的性能指标,如上升时间、超调量、稳态误差等。
4. **迭代优化:**
- 更新粒子速度和位置:
\[
v_{i}(t+1) = w \cdot v_{i}(t) + c_{1} \cdot rand() \cdot (p_{best_i} - x_{i}(t)) + c_{2} \cdot rand() \cdot (g_{best} - x_{i}(t))
\]
\[
x_{i}(t+1) = x_{i}(t) + v_{i}(t+1)
\]
- 其中,\( w \) 是惯性权重,\( c_{1} \) 和 \( c_{2} \) 是个体和全局学习因子,\( rand() \) 是随机数,\( p_{best_i} \) 是粒子 \( i \) 的个体最佳位置,\( g_{best} \) 是全局最佳位置。
5. **BP 神经网络训练:**
- 使用粒子当前的位置(即权重和偏差)初始化 BP 神经网络。
- 通过 BP 算法训练网络,获取 PID 控制器的参数。
6. **适应度评价:**
- 计算 BP 神经网络生成的 PID 控制器在控制系统中的表现,作为粒子的位置评估依据。
- 更新个体最佳位置 \( p_{best_i} \) 和全局最佳位置 \( g_{best} \)。
7. **迭代终止条件:**
- 如果达到最大迭代次数或者适应度函数达到预设标准,则迭代终止;否则,返回步骤 4。
8. **输出优化的 PID 参数:**
- 将经过 PSO 优化后的最优权重和偏差应用到 BP 神经网络,生成最优的 PID 控制器参数。
结论
通过结合粒子群算法和 BP 神经网络,可以高效地优化 PID 控制器参数,从而提升控制系统的性能。PSO 算法能够有效搜索全局最优解,避免陷入局部最优,同时 BP 神经网络能够捕捉复杂的非线性关系,提高 PID 控制器的调节精度和鲁棒性。
📚2 运行结果
部分代码:
function [wi_init, wo_init]=SPO_InitW()
%clear;
tic %该函数表示计时开始
%神经网络参数
IN=4; H=5; Out=3;
%------给定初始化条件----------------------------------------------
c1=2; %1.4962; %加速常数
c2=2 ; %1.4962; %加速常数
%w=0.7298; %惯性权重
Wmax=0.9 ; Wmin=0.4; %准备采用线性权重衰减法
MaxDT=50; %最大迭代次数
D=(H*IN)+(Out*H); %搜索空间维数(测试函数sphere中未知数个数)
N=20; %初始化群体个体数目( 一般20个粒子就足够)
Vmax=5;
Vmin=-5;
Pmax=5;
Pmin=-5;
%------初始化种群的个体(可以在这里限定位置和速度的范围)------------
for i=1:N
x(i,:)=0.15*rands(1,D);
v(i,:)=0.15*rands(1,D);
end
%------先计算各个粒子的适应度,并初始化个体最优位置y和全局最优位置Pg--------
for i=1:N
p(i)=BPNN_Fitness(x(i,:)) ; %计算每个粒子适应度
y(i,:)=x(i,:); %初始化个体最优位置y为在时间步t=0时的粒子位置
end
Pg=x(1,:); %Pg为全局最优位置 这里是初始化
for i=2:N
if BPNN_Fitness(x(i,:))<BPNN_Fitness(Pg)
Pg=x(i,:); %更新全局最优位置 初始化完毕
end
end
%------进入主要循环,按照公式依次迭代,直到满足精度要求------------
for t=1:MaxDT
fprintf('第%d次迭代-----\n',t);
%fprintf('适应度=%f\n',Pbest(t));
for i=1:N
w=Wmax-(t-1)*(Wmax-Wmin)/(MaxDT-1);
v(i,:)=w*v(i,:)+c1*rand*(y(i,:)-x(i,:))+c2*rand*(Pg-x(i,:));
v(i,find(v(i,:)>Vmax))=Vmax; %不能超过最大速度
v(i,find(v(i,:)<Vmin))=Vmin; %不低过最小速度
x(i,:)=x(i,:)+v(i,:); %更新了每个粒子的位置
x(i,find(x(i,:)>Pmax))=Pmax;
x(i,find(x(i,:)<Pmin))= Pmin;
if BPNN_Fitness(x(i,:))<p(i)
p(i)=BPNN_Fitness(x(i,:)); %更新适应度
y(i,:)=x(i,:); %更新个体最佳位置
end
if p(i)<BPNN_Fitness(Pg)
Pg=y(i,:); %每一次迭代结束后更新群体最佳位置
end
end
Pbest(t)=BPNN_Fitness(Pg); %保存每一代的群体最佳适应值
end
toc %该函数表示计时结束
%获得经粒子群算法优化的神经网络权值初始值
for t=1:H
wi_init(t,:)=x(1,(t-1)*IN+1:t*IN);
end
for r=1:Out
wo_init(r,:)=x(1, ( (IN*H+1)+(r-1)*H ): ( (IN*H+1)+r*H-1 ) );
end
%------最后给出计算结果--------
disp('*************************************************************')
disp('最优适应函数最优位置为:')
for i=1:D
fprintf('x(%d)=%s\n',i,Pg(i));
end
fprintf('最后得到的优化极值为:%s\n',BPNN_Fitness(Pg));
disp('*************************************************************')
disp('迭代分析结果')
fprintf('迭代次数:%d\n',MaxDT);
figure(1);
plot(Pbest,'Linewidth',2);
title( ['适应度曲线' ]);
grid on
xlabel('迭代次数');ylabel('适应度');
🎉3 参考文献
[1]曾雄飞.基于粒子群算法优化BP神经网络的PID控制算法[J].电子设计工程,2022,30(11):69-73+78.DOI:10.14022/j.issn1674-6236.2022.11.015.
















 4934
4934

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











