






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
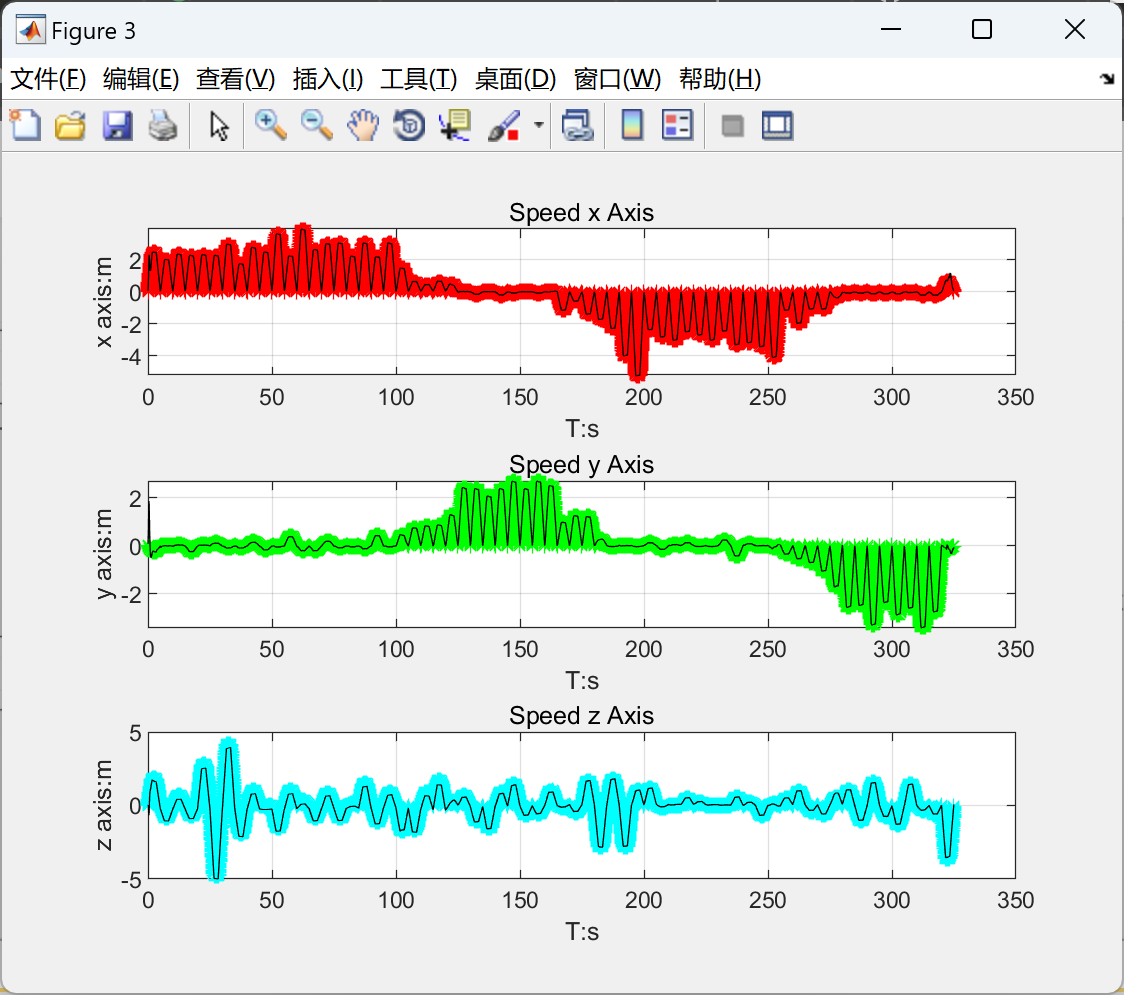
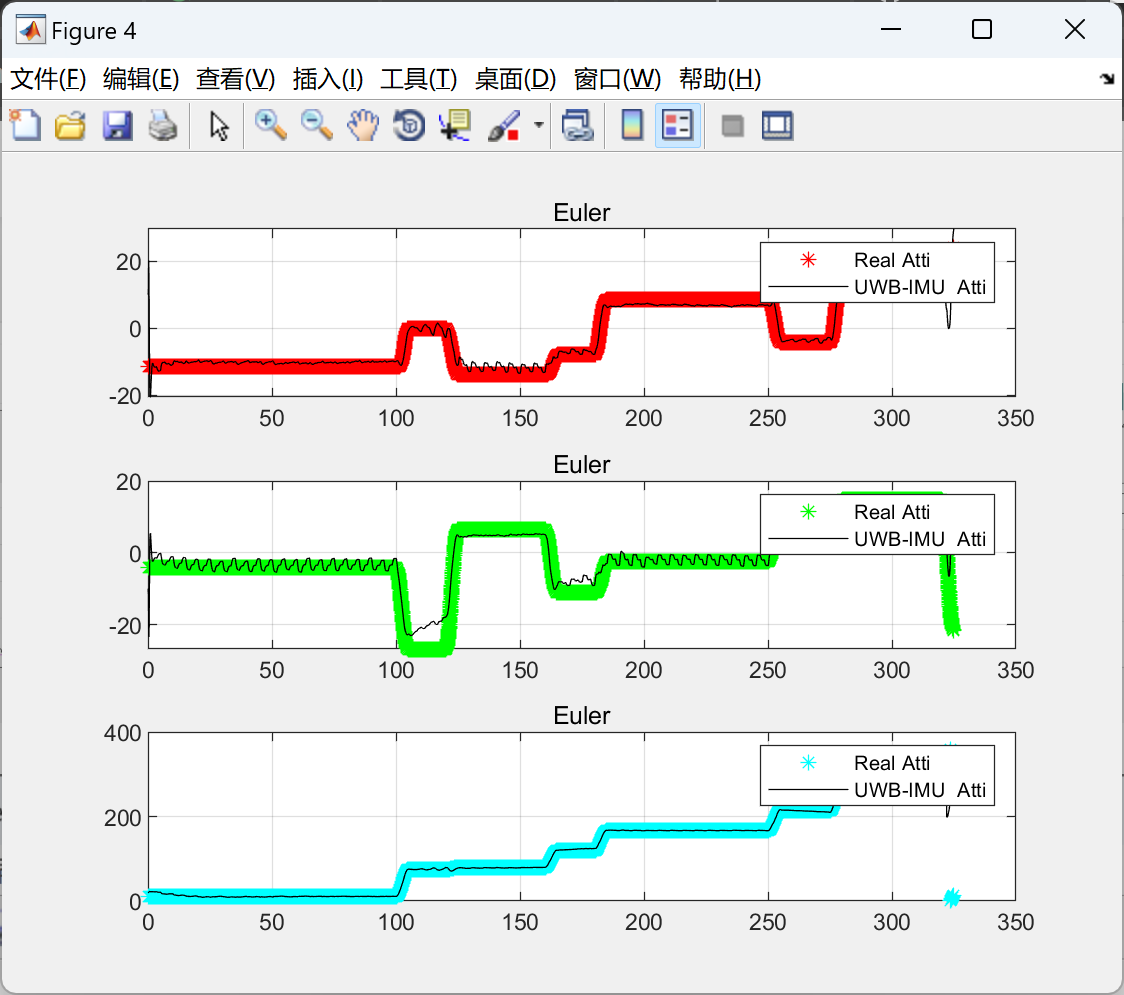
运行轨迹的研究是通过融合具有测距和6轴IMU传感器数据的位置信息来实现的。通过测距传感器可以获得物体与参考点之间的距离信息,而6轴IMU传感器可以提供物体的姿态信息和加速度信息。将这两种传感器的数据进行融合可以更准确地确定物体的位置信息,实现更精确的运行轨迹。
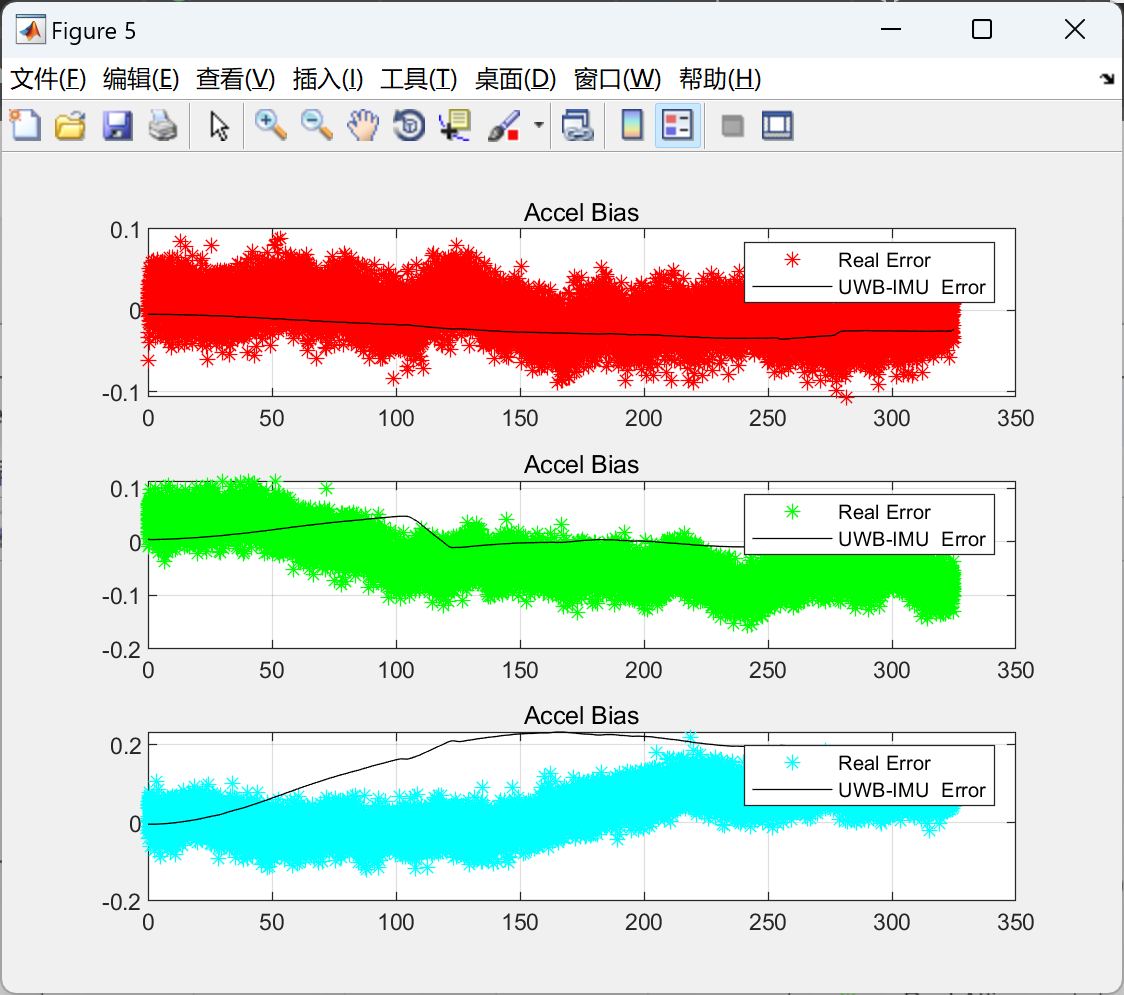
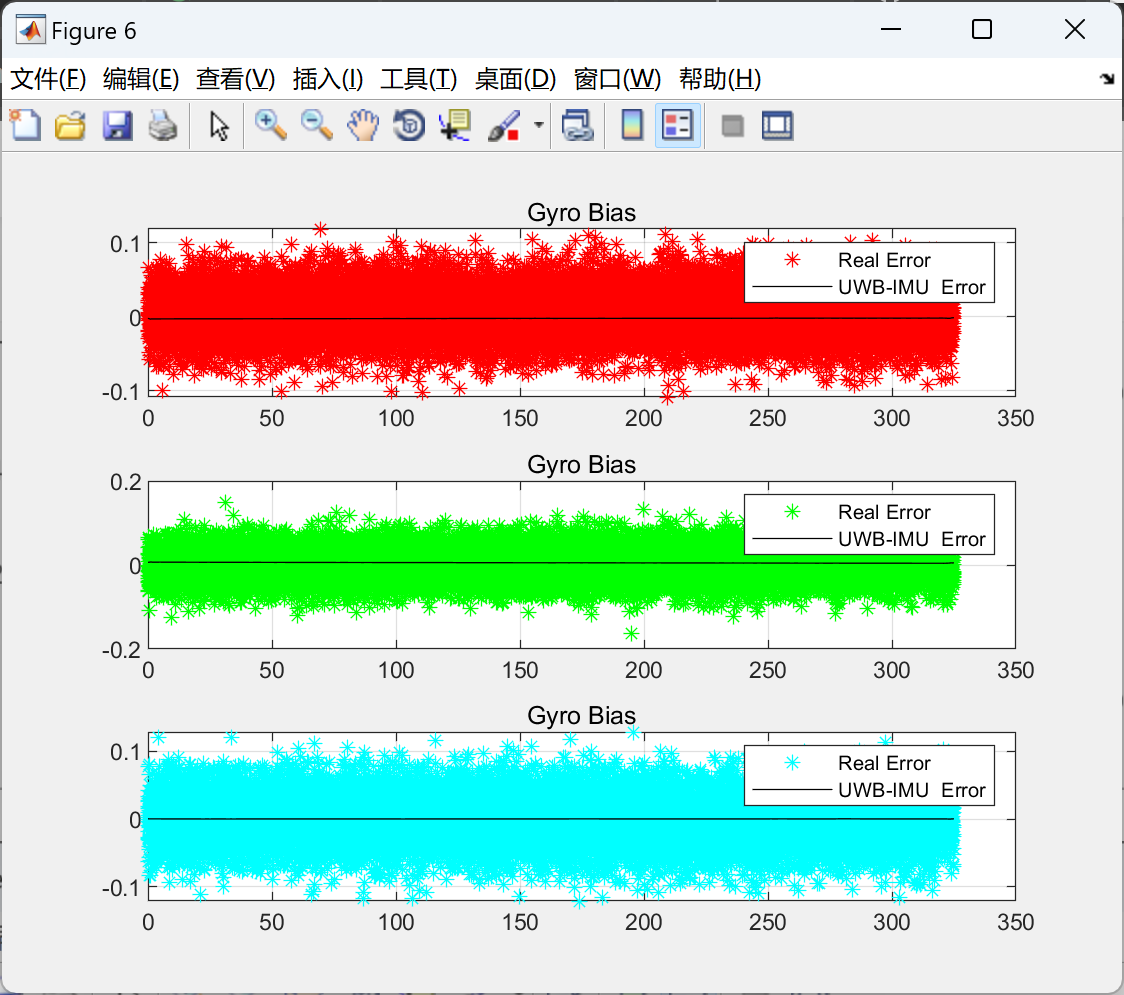
在研究过程中,需要探索如何有效地融合这两种传感器的数据,以提高位置信息的精度和稳定性。可以采用卡尔曼滤波器等传感器融合算法来对数据进行处理和估计,从而得出更可靠的位置信息。
通过融合测距和6轴IMU传感器数据的位置信息研究,可以在无GPS信号或GPS信号不稳定的环境下实现准确的运行轨迹跟踪,广泛应用于自动驾驶、室内定位、无人机等领域。
UWB-IMU Trajectory研究是指利用超宽带(UWB)定位技术和惯性测量单元(IMU)技术来进行轨迹跟踪和定位的研究。UWB技术是一种高精度的定位技术,可以实现室内和室外的准确定位,而IMU技术则可以提供精确的运动信息。
通过结合UWB和IMU技术,可以实现更精确的轨迹跟踪和定位,适用于各种场景,如室内导航、无人车自动驾驶、运动追踪等。研究人员通常会利用UWB模块和IMU传感器进行实验和数据采集,然后利用算法对数据进行处理和分析,最终实现精确的轨迹跟踪。
这种研究对于实现高精度定位和导航具有重要意义,可以为各种应用领域提供支持,促进技术的进步和应用的推广。UWB-IMU Trajectory研究在智能交通、物联网、机器人等领域有着广阔的应用前景。
文档目录见第4部分:
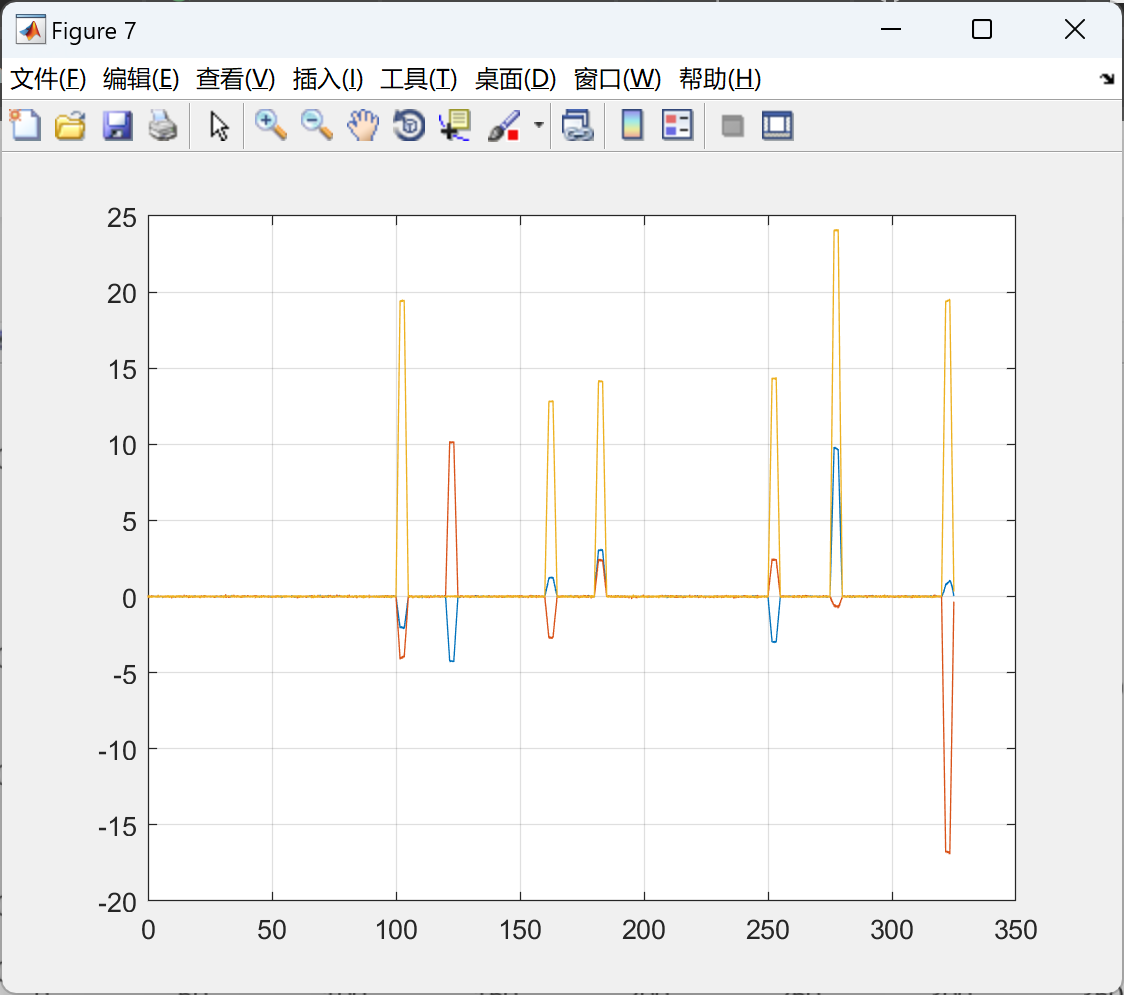
UWB-IMU组合定位导航效果,比之单一的导航,效果很明显,尤其是当UWB布局上无法解决垂直空间分辨率低时,融合算法效果明显。目前使用实际数据,效果亦能控制在0.5m以内,定位精度还可以提升,已证明该滤波方法可靠有效。
📚2 运行结果
部分代码:
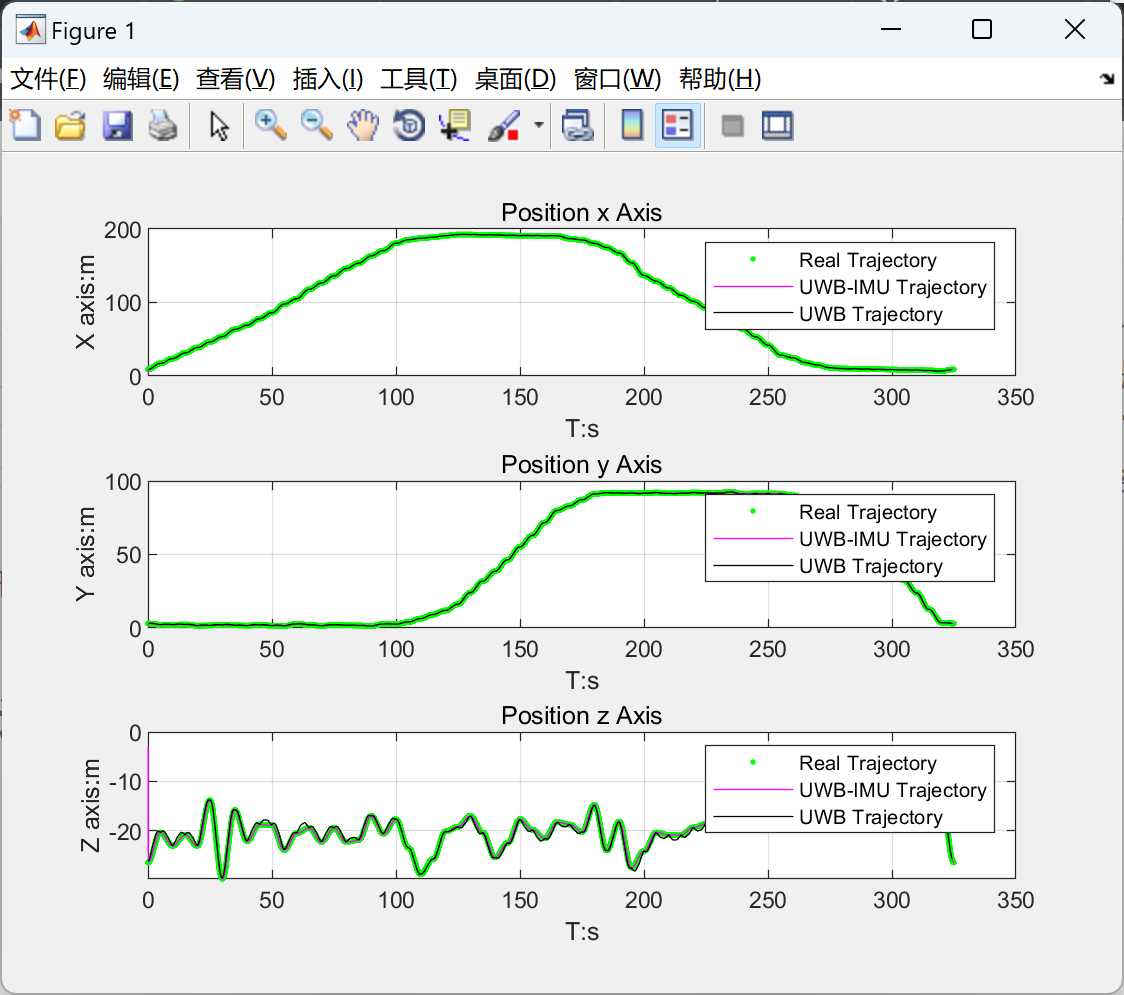
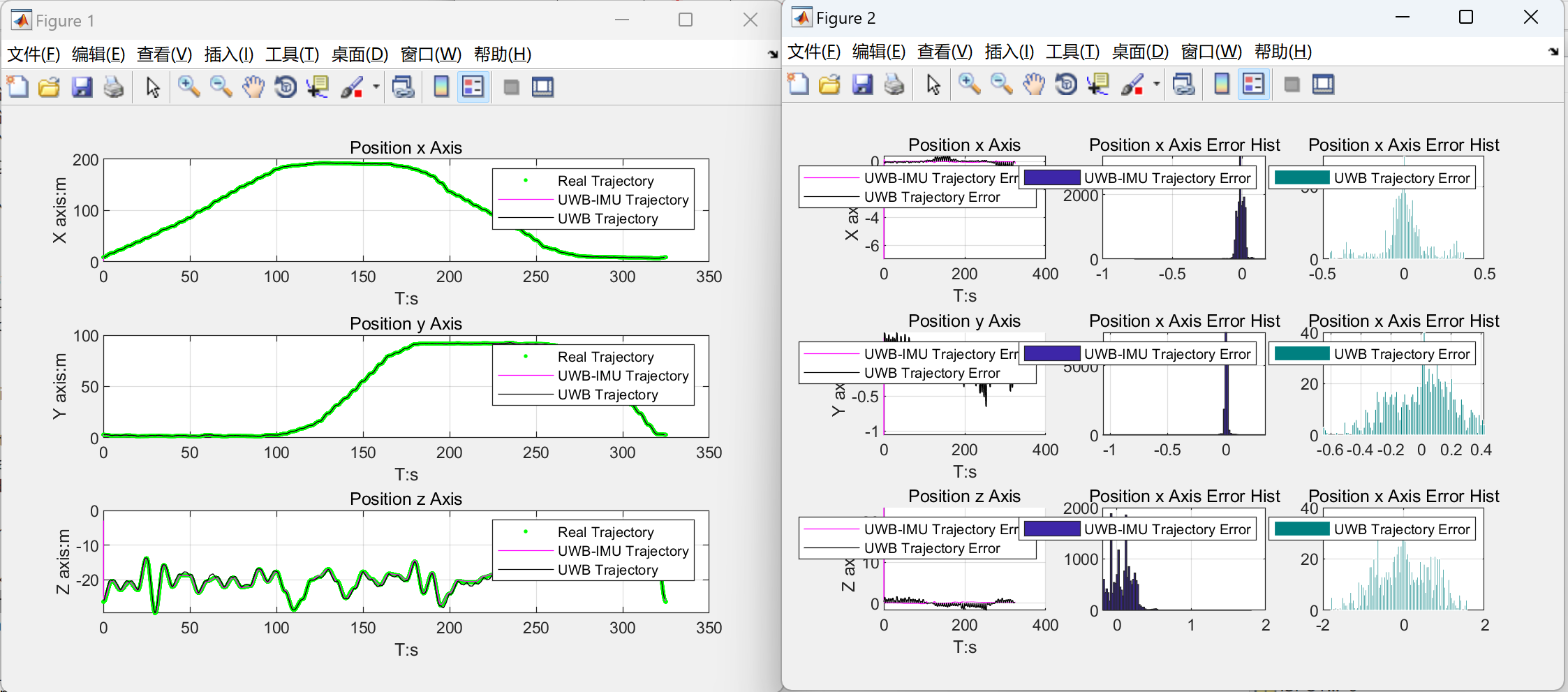
figure(1)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(2,:),'k')
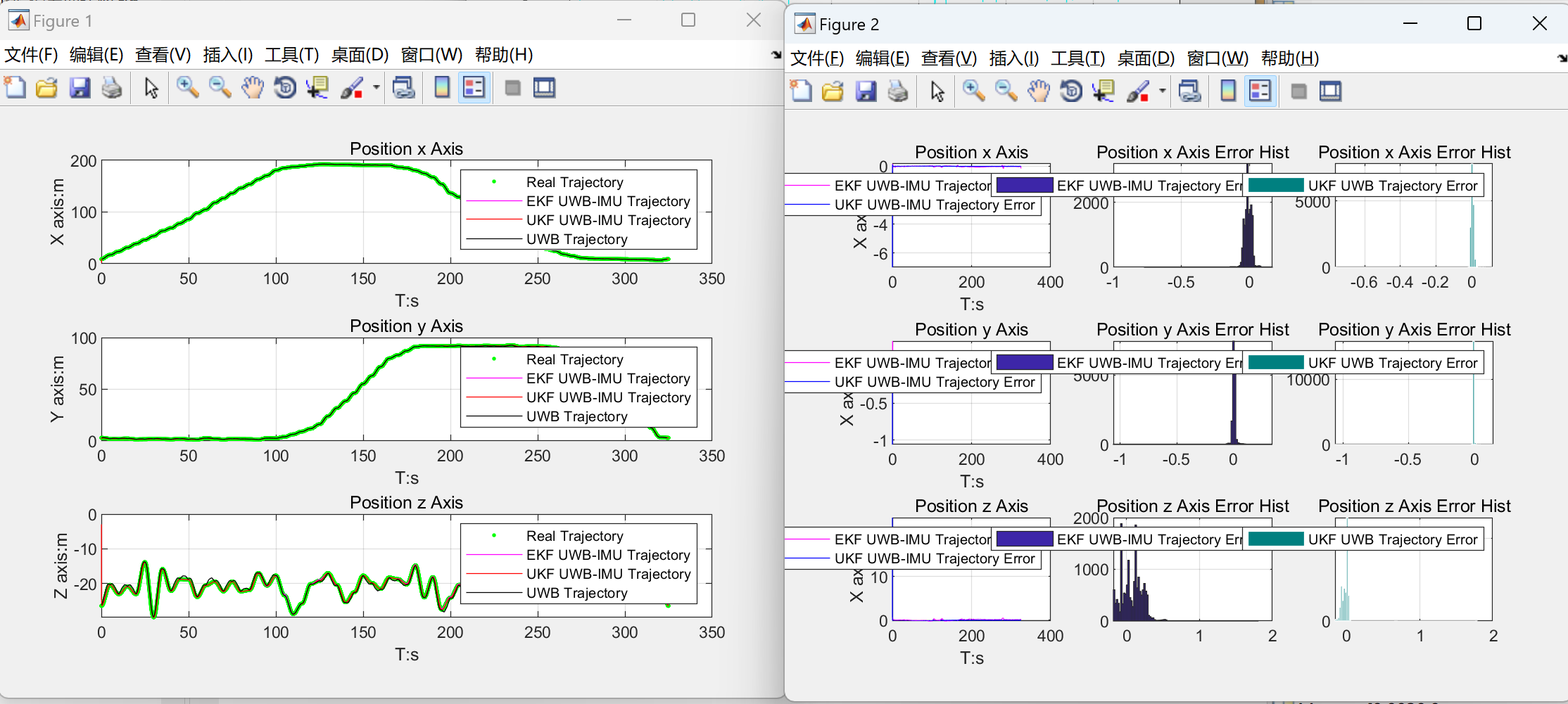
title('Position x Axis');xlabel('T:s');ylabel('X axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
% figure(2)
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(3,:),'k')
title('Position y Axis');xlabel('T:s');ylabel('Y axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
% figure(3)
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(4,:),'k')
title('Position z Axis');xlabel('T:s');ylabel('Z axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
base = 1;
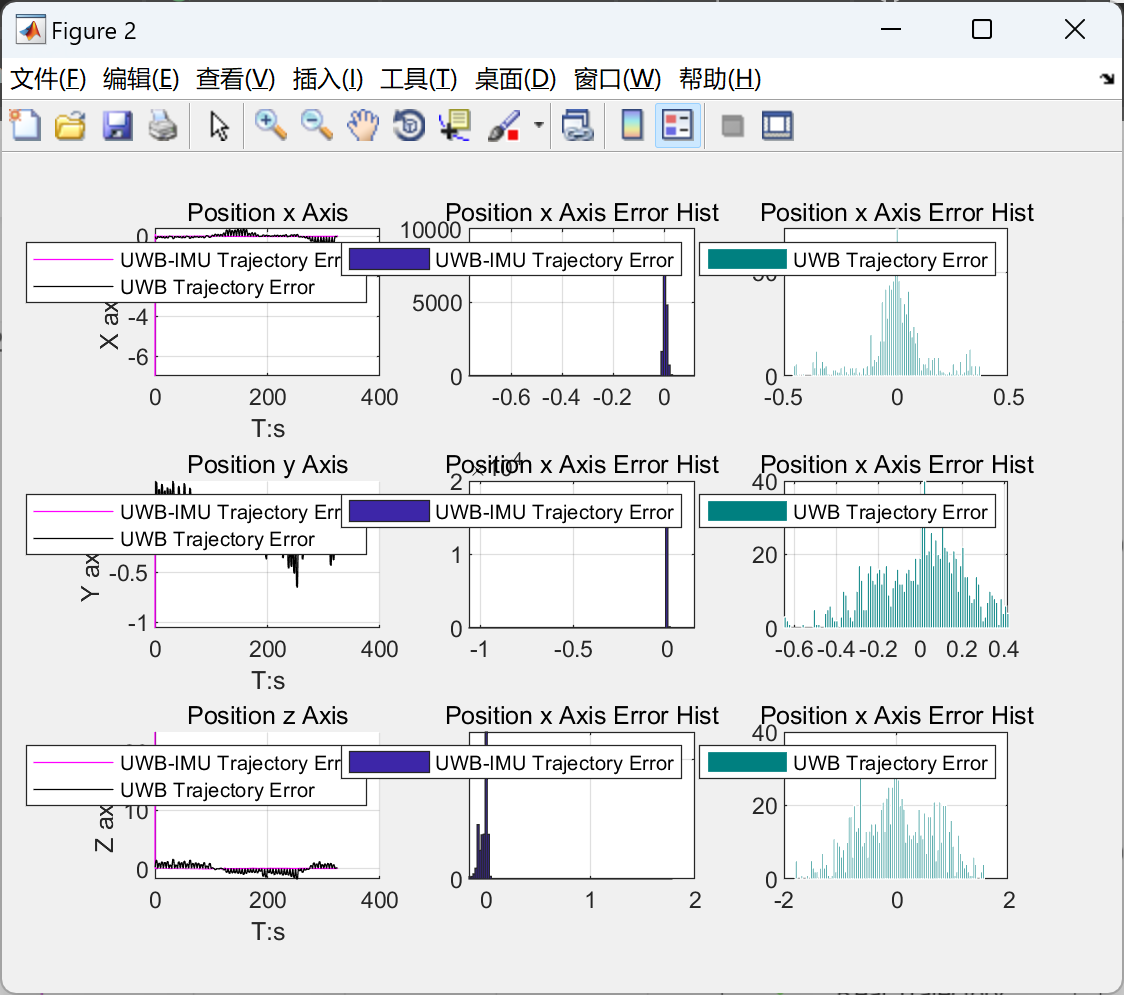
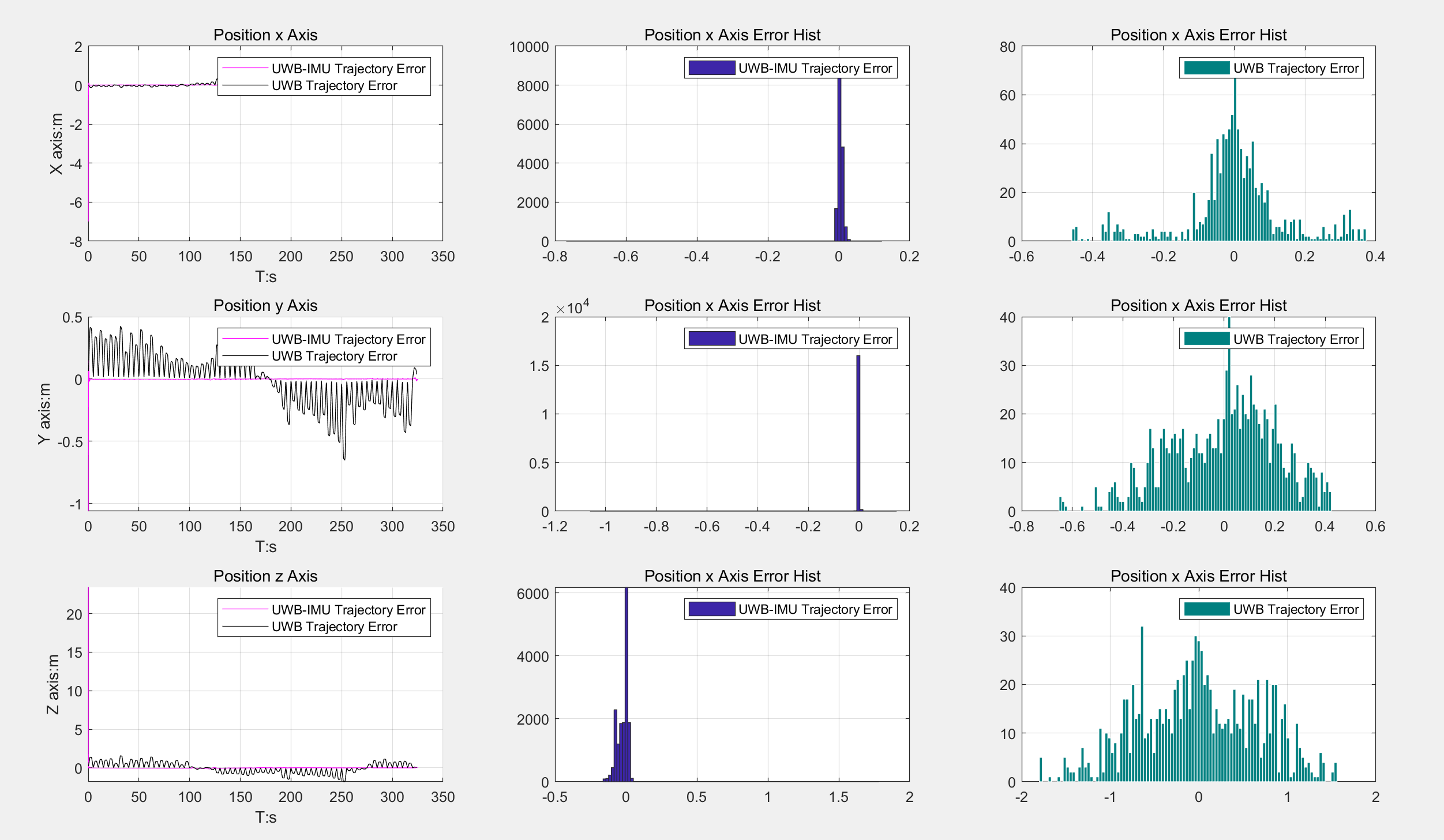
figure(2)
subplot(331)
plot(SampleTimePoint(1:Pcs),MM(base,:)'- TraceData(:,base+1),'m');
hold on
plot(UWBXYZ(1,:),UWBXYZ(2,:) - UWBXYZ(5,:),'k')
title('Position x Axis');xlabel('T:s');ylabel('X axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
subplot(332)
xvalues1 = -3:0.2:3;
error = MM(base,:)'- TraceData(:,base+1);
hist(error(find(error < 3 & error > -3)),100);
title('Position x Axis Error Hist');grid on;
legend('UWB-IMU Trajectory Error')
h=subplot(333);
error =UWBXYZ(2,:) - UWBXYZ(5,:);
hist(error(find(error < 3 & error > -3)),100);
hp = findobj(h,'Type','patch');
set(hp,'FaceColor',[0 .5 .5],'EdgeColor','w')
title('Position x Axis Error Hist');grid on;
legend('UWB Trajectory Error')
% figure(2)
subplot(334)
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:)' - TraceData(:,base+2),'m')
plot(UWBXYZ(1,:),UWBXYZ(3,:) - UWBXYZ(6,:),'k')
title('Position y Axis');xlabel('T:s');ylabel('Y axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
subplot(335)
xvalues1 = -3:0.2:3;
error = MM(base+1,:)'- TraceData(:,base+2);
hist(error(find(error < 3 & error > -3)),100);
title('Position x Axis Error Hist');grid on;
legend('UWB-IMU Trajectory Error')
h=subplot(336);
error =UWBXYZ(3,:) - UWBXYZ(6,:);
hist(error(find(error < 3 & error > -3)),100);
hp = findobj(h,'Type','patch');
set(hp,'FaceColor',[0 .5 .5],'EdgeColor','w')
title('Position x Axis Error Hist');grid on;
legend('UWB Trajectory Error')
% figure(3)
subplot(337)
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:)' - TraceData(:,base+3),'m')
plot(UWBXYZ(1,:),UWBXYZ(4,:) - UWBXYZ(7,:),'k')
title('Position z Axis');xlabel('T:s');ylabel('Z axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] Han Y , Tan X .Attitude Solving Aided UWB/IMU Integrated Algorithm with Real-time NLOS Suppression[J]. 2024.
[2]王鹏,侯忠生.UWB与IMU融合的室内动态定位算法[J].电子测量技术, 2023, 46(10):76-83.
[3]郁露,唐超礼,黄友锐,等.基于UWB和IMU的煤矿机器人紧组合定位方法研究[J].工矿自动化, 2022, 48(12):79-85.
[4]白怡明,曾祥玉,李杰,等.基于卡尔曼滤波算法的UWB+IMU组合精确定位系统在选煤厂中的应用[J].选煤技术, 2022, 50(5):6.

















 3528
3528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











