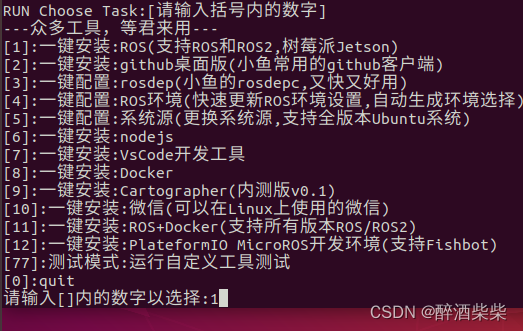
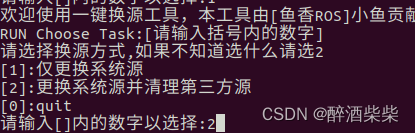
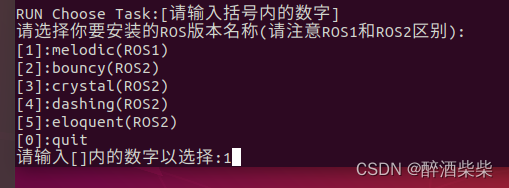
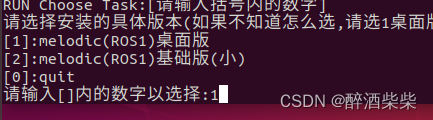
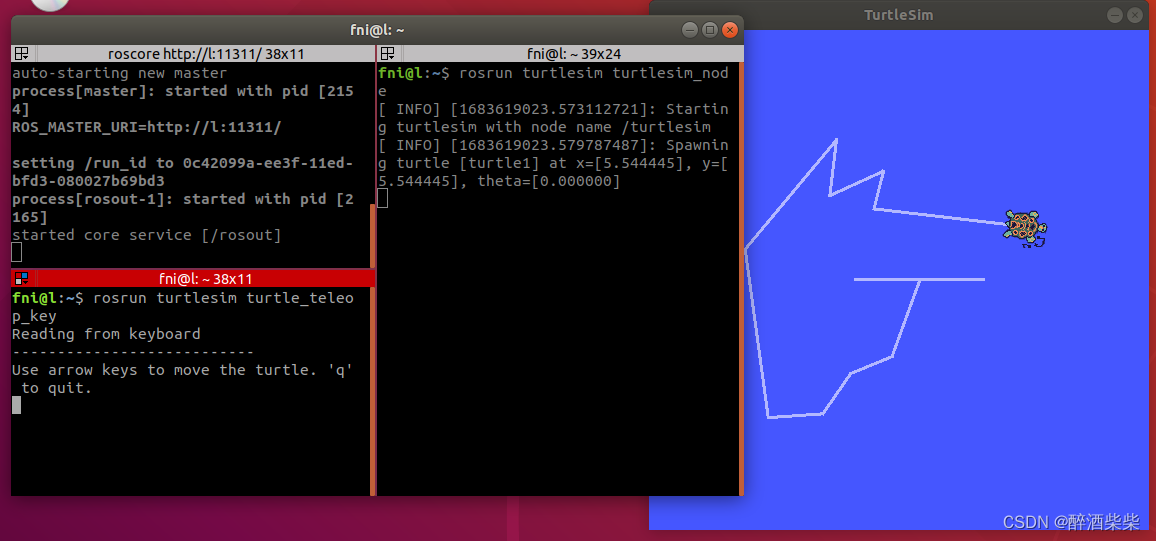
wget http://fishros.com/install -O fishros && . fishros 可以自动配置适合你的ubuntu版本的ros 安装时的选择 1.选1 2.换源 选1 3.选2 3.选择ros1,1 4.选择桌面版,1 验证是否安装成功 roscore rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key 【注】需要鼠标点击最后的键盘输入面板才可以实现键盘控制(红色的),而不是点击小乌龟页面 成功代表ros安装成功


























 399
399











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






