






1.Pure Pursuit(纯追踪法)
Pure Pursuit(纯追踪法)是一种广泛使用的基于几何的追踪方法,它在低速的条件下有比较好的效果,其是一种基于自行车模型和阿克曼转向几何推导出的控制算法,如下图所示。


Pure Pursuit算法最基本的思想:
以车的后轴中心为切点,以车的纵向车身为切线,通过控制前轮的转角,使得车辆能够沿着一条过目标点的圆弧来行驶。
目标点的选取:
选择距离自车后轴中心ld目标轨迹上的一个点,目标点与自车的角度为α,可计算出自车沿着圆弧行驶到目标点处的角度为2α。
如何计算出自车的转向角δ?
由三角形定理可得,
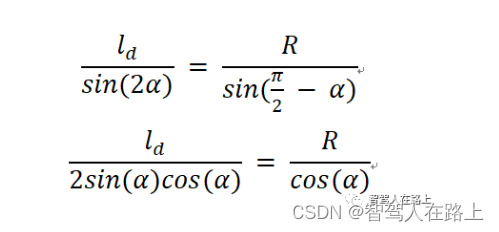
化简得:
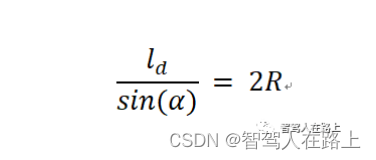
已知,

所以:
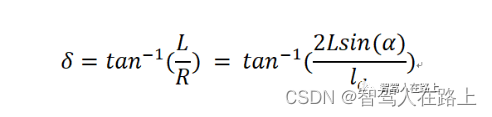
Pure Pursuit的主要影响因素为ld的选取,通常小一点的ld追踪会更加准确,因为它更靠近车辆本身,所以会更好的追踪,由于会不断更新目标点,所以系统的稳定性会随之降低。如果是大一点的ld,由于它会追踪较长的时间,所以系统相对比较稳定,但是准确性可能会随之降低。
2.Stanley
Stanley也是一种基于几何的轨迹追踪算法,它的主要思想是以前轮中心为参考点,不需要预瞄距离,直接计算前轮中心到目标轨迹的横向误差和航向误差。

算法步骤:
(1)假设当前横向误差e= 0,所以自车只需转过θe的角度,则自车可一直沿着目标轨迹行驶,此时令
(2)为了消除横向误差,构建三角形,可得
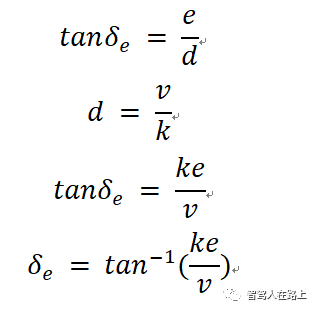
(3)
![]()
(4)
![]()
(5)低速情况下,为了解决噪音,通常加入一个正的常数Ks

(6) 在高速的情况下,当我们有转向的命令时,我们需要更缓慢的变化,以确保侧向力不会过大,即使Stanley里面有速度的考量,但在高速的情况下,反应还是很剧烈,因此,我们常常会在θe(t)上加一个阻尼项,相当于对θe(t)设计一个PD控制器。
(7)根据路径的曲率,设计一个前馈项
(8)最终的转角为

















 4045
4045











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









