







1、LCM(Lightweight Communications and Marshalling)
-
是一组用于消息传递和数据编组的库和工具,
-
目标是高带宽和低延迟的实时系统。
-
提供了一种发布/订阅消息传递模型以及带有各种编程语言C++、Java、python等应用程序绑定的自动编组/解组代码生成,通过将消息封装在不同的Channel中进行通信,这点类似于ROS中的Topic。
-
基于UDP传输的属性,传输速度较快,
-
LCM is a set of libraries and tools for message passing and data marshalling
-
targeted at real-time systems where high-bandwidth and low latency are critical
-
It provides a publish/subscribe message passing model and automatic marshalling/unmarshalling code generation with bindings for applications in a variety of programming languages.
2、搭建LCM
-
安装依赖
sudo apt-get install build-essential autoconf automake autopoint libglib2.0-dev libtool openjdk-8-jdk python-dev-
在Releases · lcm-proj/lcm (github.com)下载源码包,本文下载的是lcm-1.4.0.zip。打开terminal并cd到解压后的文件夹,依次执行:
unzip lcm-1.4.0.zip
cd lcm-1.4.0/
mkdir build
cd build
cmake ..
make编译完成后执行
sudo make install完成LCM的安装
-
然后告诉系统lib的库所在位置:,为lcm创建一个ld.so.conf文件:
export LCM_INSTALL_DIR=/usr/local/lib
sudo sh -c "echo $LCM_INSTALL_DIR> /etc/ld.so.conf.d/lcm.conf"更新
sudo ldconfig-
配置pkgconfig来查找lcm.pc:
export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:$LCM_INSTALL_DIR/pkgconfig-
至此LCM安装配置完成。
3、LCM 通信示例
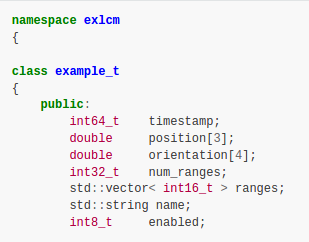
3.1、结构体定义(C++)(example_t.lcm-->/exlcm/example_t.hpp)
数据类型:lcm类型定义与编程语言无关,/home下新建文件夹lcm_example用于存放工程,进入lcm_example文件夹,新建example_t.lcm空白文档,写入以下内容
package exlcm;
struct example_t
{
int64_t timestamp;
double position[3];
double orientation[4];
int32_t num_ranges;
int16_t ranges[num_ranges];
string name;
boolean enabled;
}打开终端,执行命令
lcm-gen -x example_t.lcm运行之后生成一个文件夹exlcm,并包含一个文件example_t.hpp,到这里lcm结构体定义完成。
如果你使用其他语言,lcm-gen -h 获取帮助,
生成的c++类如下:
3.2、发送消息(send_message.cpp-->)
在lcm_example目录下,新建send_message.cpp复制以下内容(The full example is available in runnable form as examples/cpp/send_message.cpp in the LCM source distribution.)
// file: send_message.cpp
//
// LCM example program.
//
// compile with:
// $ g++ -o send_message send_message.cpp -llcm
//
// On a system with pkg-config, you can also use:
// $ g++ -o send_message send_message.cpp `pkg-config --cflags --libs lcm`
#include <lcm/lcm-cpp.hpp>
#include "exlcm/example_t.hpp"
int main(int argc, char ** argv)
{
lcm::LCM lcm;
if(!lcm.good())
return 1;
exlcm::example_t my_data;
my_data.timestamp = 0;
my_data.position[0] = 1;
my_data.position[1] = 2;
my_data.position[2] = 3;
my_data.orientation[0] = 1;
my_data.orientation[1] = 0;
my_data.orientation[2] = 0;
my_data.orientation[3] = 0;
my_data.num_ranges = 15;
my_data.ranges.resize(my_data.num_ranges);
for(int i = 0; i < my_data.num_ranges; i++)
my_data.ranges[i] = i;
my_data.name = "example string";
my_data.enabled = true;
lcm.publish("EXAMPLE", &my_data);
return 0;
}在目录~/lcm_example下打开终端,编译程序send_message,生成可执行文件,或者执行3.4建立CMakeLists.txt文件
g++ -o send_message send_message.cpp -llcm3.3、接收消息(listener.cpp-->)
在lcm_example目录下,新建listener.cpp复制以下内容(The full example is available in runnable form as examples/cpp/listener.cpp in the LCM source distribution.)
// file: listener.cpp
//
// LCM example program.
//
// compile with:
// $ gcc -o listener listener.cpp -llcm
//
// On a system with pkg-config, you can also use:
// $ gcc -o listener listener.cpp `pkg-config --cflags --libs lcm`
#include <stdio.h>
#include <lcm/lcm-cpp.hpp>
#include "exlcm/example_t.hpp"
class Handler
{
public:
~Handler() {}
void handleMessage(const lcm::ReceiveBuffer* rbuf,
const std::string& chan,
const exlcm::example_t* msg)
{
int i;
printf("Received message on channel \"%s\":\n", chan.c_str());
printf(" timestamp = %lld\n", (long long)msg->timestamp);
printf(" position = (%f, %f, %f)\n",
msg->position[0], msg->position[1], msg->position[2]);
printf(" orientation = (%f, %f, %f, %f)\n",
msg->orientation[0], msg->orientation[1],
msg->orientation[2], msg->orientation[3]);
printf(" ranges:");
for(i = 0; i < msg->num_ranges; i++)
printf(" %d", msg->ranges[i]);
printf("\n");
printf(" name = '%s'\n", msg->name.c_str());
printf(" enabled = %d\n", msg->enabled);
}
};
int main(int argc, char** argv)
{
lcm::LCM lcm;
if(!lcm.good())
return 1;
Handler handlerObject;
lcm.subscribe("EXAMPLE", &Handler::handleMessage, &handlerObject);
while(0 == lcm.handle());
return 0;
}在目录~/lcm_example下打开终端,编译程序listener,生成可执行文件,或者执行3.4建立CMakeLists.txt文件
gcc -o listener listener.cpp -llcm3.4、编辑CMakeLists.txt文件
在lcm_example目录下,新建CMakeLists.txt文件
project(lcm_test)
set(CMAKE_CXX_STANDARD 11)
add_executable(send_message send_message.cpp)
target_link_libraries(send_message lcm)
add_executable(listener listener.cpp)
target_link_libraries(listener lcm)编译CMakeLists.txt文件成功后,生成可执行文件send_message和listener。
cmake
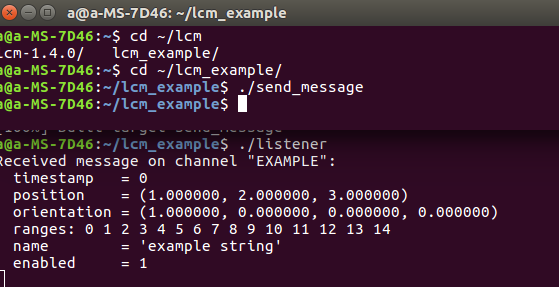
make3.5、发送-接收消息
分别在两个terminal中cd到可执行文件所在位置,分别运行:
./listener ./send_message
在listener窗口可以看到接收的消息
3.6、lcm-log数据解析
在官网给出的例子中,有一段log数据解析的demo,新建read_log.cpp复制以下内容
// file: read_log.cpp
//
// LCM example program. Demonstrates how to read and decode messages directly
// from a log file in C++. It is also possible to use the log file provider --
// see the documentation on the LCM class for details on that method.
//
// compile with:
// $ g++ -o read_log read_log.cpp -llcm
//
// On a system with pkg-config, you can also use:
// $ g++ -o read_log read_log.cpp `pkg-config --cflags --libs lcm`
#include <stdio.h>
#include <lcm/lcm-cpp.hpp>
#include "exlcm/example_t.hpp"
int main(int argc, char ** argv)
{
if(argc < 2) {
fprintf(stderr, "usage: read_log <logfile>\n");
return 1;
}
// Open the log file.
lcm::LogFile log(argv[1], "r");
if(!log.good()) {
perror("LogFile");
fprintf(stderr, "couldn't open log file %s\n", argv[1]);
return 1;
}
while(1) {
// Read a log event.
const lcm::LogEvent *event = log.readNextEvent();
if(!event)
break;
// Only process messages on the EXAMPLE channel.
if(event->channel != "EXAMPLE")
continue;
// Try to decode the message.
exlcm::example_t msg;
if(msg.decode(event->data, 0, event->datalen) != event->datalen)
continue;
// Decode success! Print out the message contents.
printf("Message:\n");
printf(" timestamp = %lld\n", (long long)msg.timestamp);
printf(" position = (%f, %f, %f)\n",
msg.position[0], msg.position[1], msg.position[2]);
printf(" orientation = (%f, %f, %f, %f)\n",
msg.orientation[0], msg.orientation[1], msg.orientation[2],
msg.orientation[3]);
printf(" ranges:");
for(int i = 0; i < msg.num_ranges; i++)
printf(" %d", msg.ranges[i]);
printf("\n");
printf(" name = '%s'\n", msg.name.c_str());
printf(" enabled = %d\n", msg.enabled);
}
// Log file is closed automatically when the log variable goes out of
// scope.
printf("done\n");
return 0;
}同样在终端编译
$ g++ -o read_log read_log.cpp -llcm
我们先在终端使用以下命令记录log,同时运行几次./send_message发送消息的程序
$ lcm-logger
退出程序,关闭终端后在/home下可以看到以当前时间命名的log数据包,如lcmlog-2020-01-29.00
打开一个终端,只需运行./read_log来读取log数据包。
$ ./read_log '~/lcmlog-2020-01-29.00'
在./read_log窗口可以显示读取的log包数据
Message:
timestamp = 0
position = (1.000000, 2.000000, 3.000000)
orientation = (1.000000, 0.000000, 0.000000, 0.000000)
ranges: 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14
name = 'example string'
enabled = 1在lcm-1.4.0/examples/中还有python、java、matlab等其他语言的demo。
3b、LCM通信示例2 ROS系统学习7---LCM数据的发送和接收 - 古月居 (guyuehome.com)
3b.1、LCM_Client.cpp:
#include <iostream>
#include "lcm/lcm-cpp.hpp"
int main()
{
lcm::LCM lcm;
if (!lcm.good())
{
return 1;
}
char data[5];
data[0] = 1;
data[1] = 5;
data[2] = 1;
data[3] = 2;
data[4] = 1;
lcm.publish("EXAMPLE", data,5);//第一个参数是通道名,第二个参数是数据指针,第三个参数是长度
std::cout << "发送成功!";
return 0;
}然后编译+链接:
g++ `pkg-config --cflags lcm` -I. -o Client.o -c LCM_Client.cpp g++ -o Client Client.o `pkg-config --libs lcm`
3b.2、LCM_Server.cpp:
#include <iostream>
#include "lcm/lcm-cpp.hpp"
class MyMessageHandler
{
public:
void onMessage(const lcm::ReceiveBuffer* rbuf, const std::string& channel)
{
std::cout << (int)((unsigned char*)rbuf->data)[0] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[1] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[2] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[3] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[4] << std::endl;
std::cout << "接收成功!";
}
};
int main() {
lcm::LCM lcm;
MyMessageHandler handler;
lcm.subscribe("EXAMPLE", &MyMessageHandler::onMessage, &handler);
while (true)
lcm.handle();
return 0;
}同样编译+链接:
g++ `pkg-config --cflags lcm` -I. -o Server.o -c LCM_Server.cpp g++ -o Server Server.o `pkg-config --libs lcm`
4. ROS系统下LCM通信示例
4.1、建立LCM_Client.cpp文件
#include <ros/ros.h>
#include <iostream>
#include "lcm/lcm-cpp.hpp"
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_publisher");
ros::NodeHandle nh;
lcm::LCM lcm;
if (!lcm.good())
{
return 1;
}
char data[5];
data[0] = 1;
data[1] = 5;
data[2] = 1;
data[3] = 2;
data[4] = 1;
lcm.publish("EXAMPLE", data,5);//第一个参数是通道名,第二个参数是数据指针,第三个参数是长度
std::cout << "发送成功!";
ros::spinOnce();
}4.2、建立LCM_Server.cpp文件
#include <ros/ros.h>
#include <iostream>
#include "lcm/lcm-cpp.hpp"
class MyMessageHandler
{
public:
void onMessage(const lcm::ReceiveBuffer* rbuf, const std::string& channel)
{
std::cout << (int)((unsigned char*)rbuf->data)[0] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[1] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[2] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[3] << std::endl;
std::cout << (int)((unsigned char*)rbuf->data)[4] << std::endl;
std::cout << "接收成功!";
}
};
int main(int argc, char** argv)
{
ros::init(argc, argv, "image_publisher");
ros::NodeHandle nh;
lcm::LCM lcm;
MyMessageHandler handler;
lcm.subscribe("EXAMPLE", &MyMessageHandler::onMessage, &handler);
while (true)
lcm.handle();
ros::spin();
}4.3、修改CmakeLists.txt文件
include_directories(${catkin_INCLUDE_DIRS})
add_executable(LCM_Client src/LCM_Client.cpp)
target_link_libraries(LCM_Client lcm)
target_link_libraries(LCM_Client ${catkin_LIBRARIES})
add_executable(LCM_Server src/LCM_Server.cpp)
target_link_libraries(LCM_Server lcm) //necessary for lcm message transmission
target_link_libraries(LCM_Server ${catkin_LIBRARIES}编译运行即可。
cmake_minimum_required(VERSION 2.8.3)
project(lcm_test2)
set(CMAKE_CXX_STANDARD 11)
find_package(catkin REQUIRED COMPONENTS
roscpp
)
include_directories(
lcm
src
${catkin_INCLUDE_DIRS}
)
add_executable(LCM_Client src/LCM_Client.cpp)
target_link_libraries(LCM_Client lcm ${catkin_LIBRARIES})
add_executable(LCM_Server src/LCM_Server.cpp)
target_link_libraries(LCM_Server lcm ${catkin_LIBRARIES})简单来说,在ROS中使用LCM,需要将lcm相应头文件include进来,并且生成lcm变量,使用lcm.publish和lcm.subscribe即可。
参考资料
* [LCM downloads](Releases · lcm-proj/lcm · GitHub) * [Website and documentation](LCM Documentation — LCM documentation)
[LCM通信示例参考]自动驾驶消息传输机制LCM的安装与使用_lcm 自动驾驶_一大群蜗牛的博客-CSDN博客
[LCM通信示例参考,ROS下使用参考]ROS学习(四)ROS系统下LCM通信 - 简书 (jianshu.com) ROS系统学习7---LCM数据的发送和接收 - 古月居 (guyuehome.com) 机器人控制系统——LCM - 古月居 (guyuehome.com) LCM源代码之通信(三) | 豌豆哥的小站 (gitee.io)
















 1650
1650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











