







前言
OpenVINS是基于MSCKF的开源VIO算法,有非常详细的官网文档可以学习使用,将来一段时间的主要实践工作,就是深度掌握这份开源代码。
https://docs.openvins.com/
一、环境配置与Euroc数据集运行
我的环境是Ubuntu20.04,ROS1,参看https://docs.openvins.com/gs-installing.html进行配置下载就行,Euroc数据集从OpenVINS支持数据集那里能够直接下载。
https://docs.openvins.com/gs-datasets.html#gs-data-euroc
关于Euroc的运行,我下载的最新版本OpenVINS好像没有pgeneva_ros_eth.launch ,网上很多博客可能没办法直接运行。不过参考这个博客就行。
https://blog.csdn.net/PG__13/article/details/123323802
关于运行配置,主要都在subscribe.launch里面,通过配置不同参数,进行运行选项的选择。
<launch>
<!-- what config we are going to run (should match folder name) -->
<arg name="verbosity" default="INFO" /> <!-- ALL, DEBUG, INFO, WARNING, ERROR, SILENT -->
<arg name="config" default="euroc_mav" /> <!-- euroc_mav, tum_vi, rpng_aruco -->
<arg name="config_path" default="$(find ov_msckf)/../config/$(arg config)/estimator_config.yaml" />
<!-- mono or stereo and what ros bag to play -->
<arg name="max_cameras" default="2" />
<arg name="use_stereo" default="true" />
<arg name="bag_start" default="0" /> <!-- v1-2: 0, mh1: 40, mh2: 35, mh3: 17.5, mh4-5: 15 -->
<arg name="bag_rate" default="1" />
<arg name="dataset" default="V1_01_easy" /> <!-- V1_01_easy, V1_02_medium, V2_02_medium -->
<arg name="dobag" default="false" /> <!-- if we should play back the bag -->
<arg name="bag" default="/media/patrick/RPNG\ FLASH\ 3/$(arg config)/$(arg dataset).bag" />
<!-- <arg name="bag" default="/home/patrick/datasets/$(arg config)/$(arg dataset).bag" />-->
<!-- <arg name="bag" default="/datasets/$(arg config)/$(arg dataset).bag" />-->
<!-- saving trajectory path and timing information -->
<arg name="dosave" default="false" />
<arg name="dotime" default="false" />
<arg name="path_est" default="/tmp/traj_estimate.txt" />
<arg name="path_time" default="/tmp/traj_timing.txt" />
<!-- if we should viz the groundtruth -->
<arg name="dolivetraj" default="false" />
<arg name="path_gt" default="$(find ov_data)/$(arg config)/$(arg dataset).txt" />
<!-- MASTER NODE! -->
<!-- <node name="ov_msckf" pkg="ov_msckf" type="run_subscribe_msckf" output="screen" clear_params="true" required="true" launch-prefix="gdb -ex run --args">-->
<node name="ov_msckf" pkg="ov_msckf" type="run_subscribe_msckf" output="screen" clear_params="true" required="true">
<!-- master configuration object -->
<param name="verbosity" type="string" value="$(arg verbosity)" />
<param name="config_path" type="string" value="$(arg config_path)" />
<!-- world/filter parameters -->
<param name="use_stereo" type="bool" value="$(arg use_stereo)" />
<param name="max_cameras" type="int" value="$(arg max_cameras)" />
<!-- timing statistics recording -->
<param name="record_timing_information" type="bool" value="$(arg dotime)" />
<param name="record_timing_filepath" type="string" value="$(arg path_time)" />
</node>
<!-- play the dataset -->
<group if="$(arg dobag)">
<node pkg="rosbag" type="play" name="rosbag" args="-d 1 -r $(arg bag_rate) -s $(arg bag_start) $(arg bag)" required="true"/>
</group>
<!-- record the trajectory if enabled -->
<group if="$(arg dosave)">
<node name="recorder_estimate" pkg="ov_eval" type="pose_to_file" output="screen" required="true">
<param name="topic" type="str" value="/ov_msckf/poseimu" />
<param name="topic_type" type="str" value="PoseWithCovarianceStamped" />
<param name="output" type="str" value="$(arg path_est)" />
</node>
</group>
<!-- path viz of aligned gt -->
<group if="$(arg dolivetraj)">
<node name="live_align_trajectory" pkg="ov_eval" type="live_align_trajectory" output="log" clear_params="true">
<param name="alignment_type" type="str" value="posyaw" />
<param name="path_gt" type="str" value="$(arg path_gt)" />
</node>
</group>
</launch>
二、TUM数据集运行测试
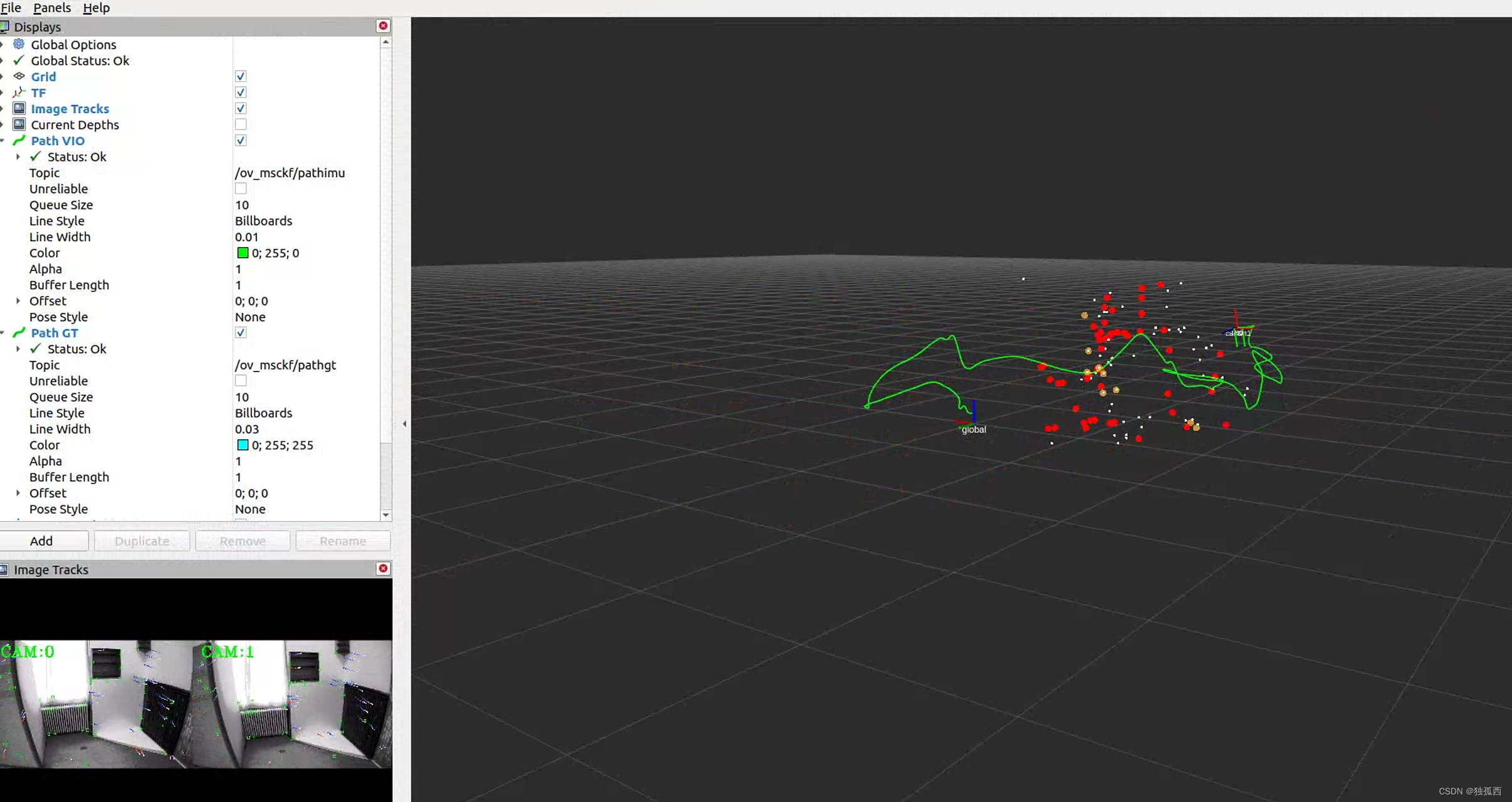
TUM数据集也可以从OpenVINS支持数据集那里下载,运行命令主要也是参照subscribe.launch进行配置,因为OpenVINS原生支持TUM数据集,所以比较容易跑通。运行命令如下:
//开启一个终端
roscore
//开启一个终端
rviz
//打开rviz后,再点击左上角,open config,添加workspace/catkin_ws_ov/src/open_vins/ov_msckf/launch/display.rviz配置文件
//开启一个终端
source devel/setup.bash
roslaunch ov_msckf subscribe.launch config:=tum_vi dataset:=dataset-room1_512_16
//在存放数据bag的文件夹内开启一个终端
rosbag play dataset-room1_512_16.bag
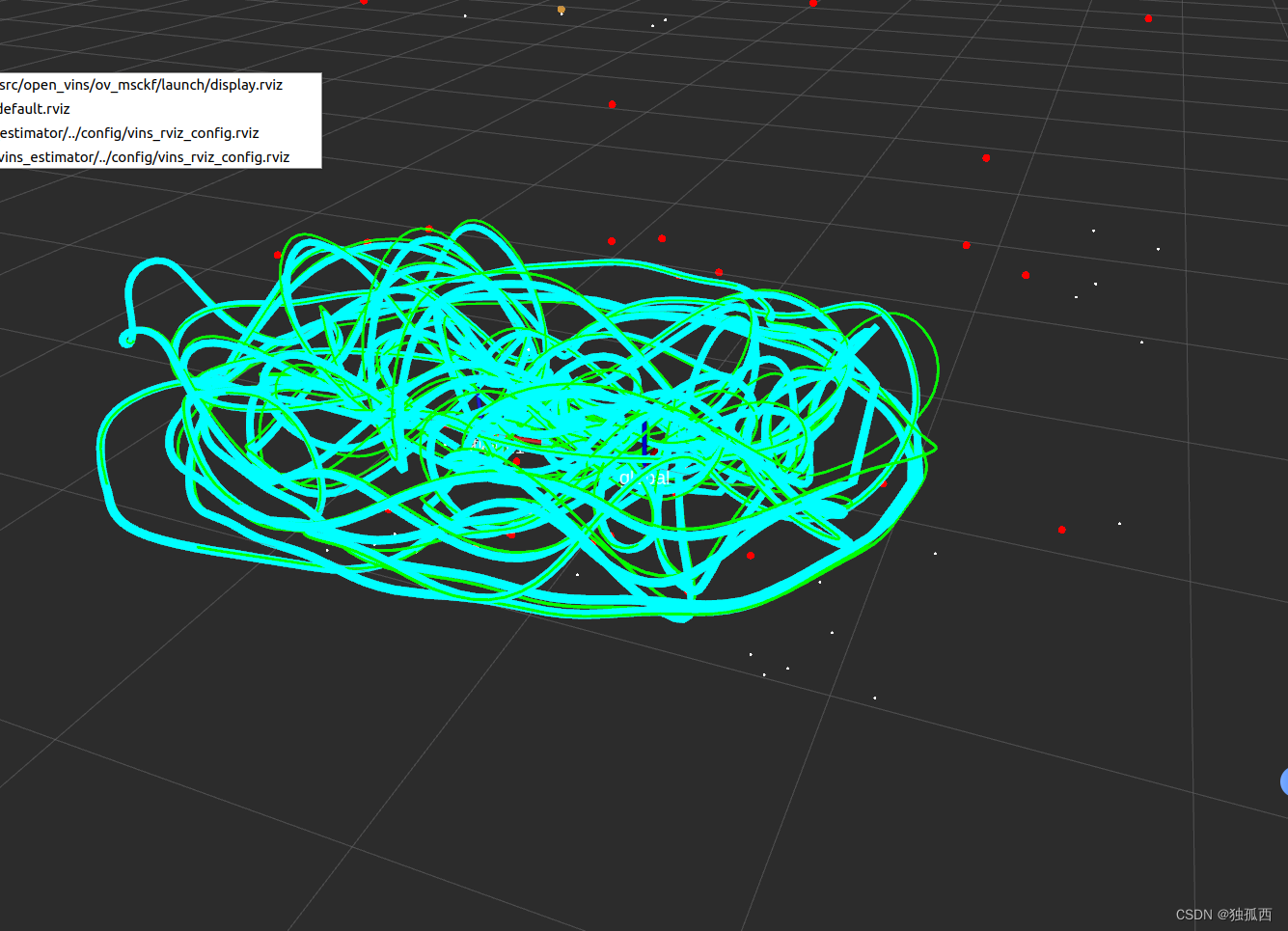
有个真值的问题没解决,运行Euroc的时候就发现了,RVIZ中没有显示真实轨迹,这里以TUM为例演示一下怎么显示真实轨迹,Euroc数据集是同理的。将dolivetraj参数配置为true就行,因为OpenVINS里自带了真实轨迹数据,会自动找到,但是如果使用其他数据集,则还需要改动真值路径等参数。
roslaunch ov_msckf subscribe.launch config:=tum_vi dataset:=dataset-room1_512_16 dolivetraj:=true
此外,ov_eval中还有很多评估工具,需要单独运行来使用,之后出一期专门学习一下这个。
3、VIRAL数据集配置运行
这是今天的重点部分,原生OpenVINS并不支持VIRAL数据集,但是VIRAL数据集作者曾经就在OpenVINS运行出过一个改动好的代码,但是现在OpenVINS中launch文件经过改动了,因此也需要重新配置一番。
VIRAL支持的OpenVINS:https://github.com/brytsknguyen/open_vins.git
主要需要修改的地方有:配置文件添加,真实轨迹文件添加,数据集添加测试。
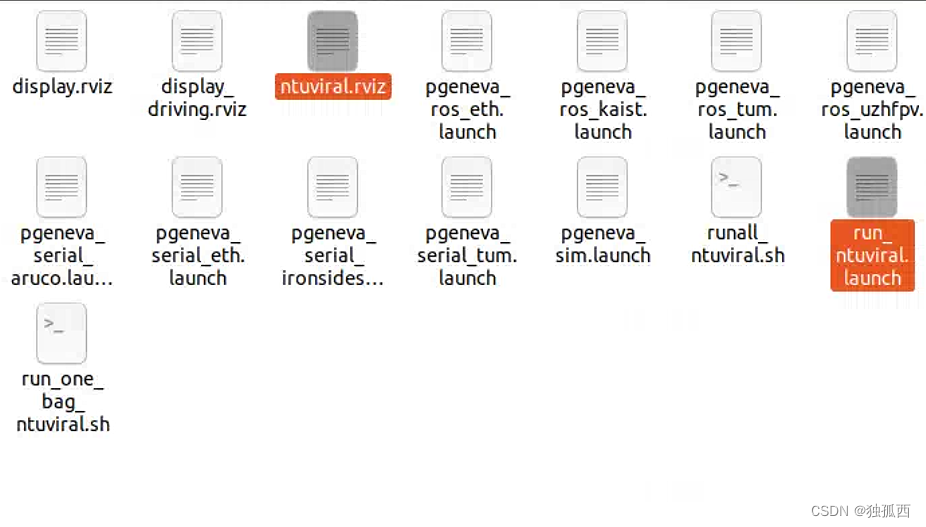
直接去VIRAL支持的OpenVINS里把ntuviral.rviz、run_ntuviral.launch粘贴到自己的OpenVINS中的open_vins/ov_msckf/launch文件夹下就行了。VIRAL作者已经将配置参数都写到了run_ntuviral.launch里面。
运行命令
//打开一个终端
roscore
//打开一个终端
roslaunch ov_msckf run_ntuviral.launch bagfile:=/home/merlincs/workspace/dataset/VIRAL/eee_01
//后面是bag的路径
这一块还是有问题,明天再搞了。。。


















 8503
8503

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











