







 本文介绍了如何使用Android设备录制RealSense D435i相机数据,并进行处理,以适应VINS的离线运行。首先,通过特定的Android APP录制相机数据并保存。接着,解析bag文件,提取加速度计和陀螺仪数据,并进行插值处理以匹配时间戳。然后,组织数据结构,包括图像和IMU数据。最后,生成ROS bag数据,使VINS能够进行离线运行。
本文介绍了如何使用Android设备录制RealSense D435i相机数据,并进行处理,以适应VINS的离线运行。首先,通过特定的Android APP录制相机数据并保存。接着,解析bag文件,提取加速度计和陀螺仪数据,并进行插值处理以匹配时间戳。然后,组织数据结构,包括图像和IMU数据。最后,生成ROS bag数据,使VINS能够进行离线运行。
聪明者戒太察,刚强者戒太暴,温良者戒无断。——(清)金缨《格言联璧·持躬类》
经过之前坚持不懈的探索,已经先后实现了VINS在公开数据集上的运行、PC端+相机VINS在线运行、PC端数据录制VINS离线运行以及ROSbag数据的生成。但是要是想进行室外实际场景的实验,带着电脑进来采集数据实在是一个苦差事,电脑笨重不说,光是凛冽的寒风也让人受不了。因此,本人不断探索,终于实现了在Android移动终端上进行数据录制,之后在电脑端进行一些数据处理,主要是bag数据的加速度计数据和陀螺仪数据合并成一个topic,然后就可以在VINS上进行运行了。
一、Android端数据录制
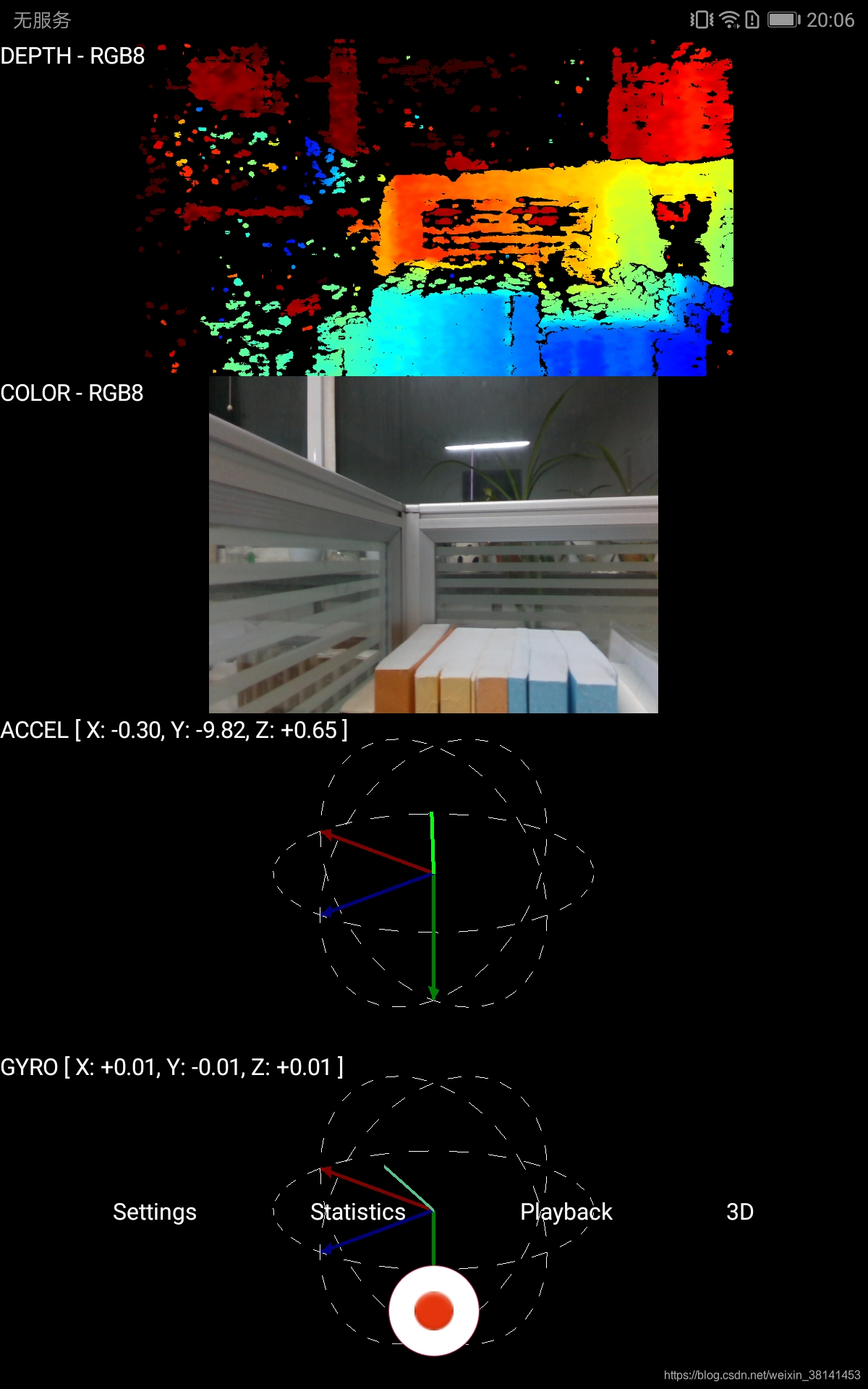
首先,实名感谢z2309323博主张师兄提供的Android端相机数据录制APP安装包,下载地址:realsense相机Android端安装包。安装之后打开,连接好相机,就可以看到相机的输出了,界面如下图所示。点击红色按钮即可进行数据的录制,录制的数据会保存在realsense文件夹中,在设置一栏中可以选择需要录制的数据、修改数据的频率等。
二、解析提取bag数据
由于Android端录制的数据的topic和VINS需要的相距甚远,尤其是加速度计和陀螺仪的数据还被分开了,所以需要将相关的数据从bag中提取出来,进行相应的处理之后再生成理想的bag数据包。
首先,提取加速度计和陀螺仪的数据到相应的csv文件,请注意修改路径和文件名称。
rostopic echo -b '/home/dong/a.bag' -p /device_0/sensor_2/Accel_0/imu/data > Acce_data.csv && rostopic echo -b '/home/dong/a.bag' -p /device_0/sensor_2/Gyro_0/imu/data > Gyro_data.csv之后,将提取的加速度计数据和陀螺仪数据合并。由于两种数据频率不同,时间戳也没有同步,因此需要进行一定的处理。本文采取了反距离加权插值的方法,使用Python语言,以加速度计的频率和时间戳为基准对陀螺仪数据进行插值。代码如下,请注意修改路径和文件名称。
# coding=utf-8
import csv
# 使用反距离加权计算权重
def calculate(timeTarget, time1, time2):
return [float((time2 - timeTarget) / (time2 - time1)), float((timeTarget - time1) / (time2 - time1))]
# 加速度计频率:250赫兹,陀螺仪频率:200赫兹,相机频率:15赫兹,图像分辨率640×480
# 采用将陀螺仪的数据合并至加速度计,也就是使用少的计算多的
if __name__ == '__main__':
target = '/home/dong/data.csv'
csv_write = csv.writer(open(target, 'wb'))
csv_head = ["#timestamp [ns]", "w_RS_S_x [rad s^-1]", "w_RS_S_y [rad s^-1]", "w_RS_S_z [rad s^-1]",
"a_RS_S_x [m s^-2]", "a_RS_S_y [m s^-2]", "a_RS_S_z [m s^-2]"]
csv_write.writerow(csv_head) # 写入文件头
list_acce = list(csv.reader(open('/home/dong/Acce_data.csv')))
list_gyro = list(csv.reader(open('/home/dong/Gyro_data.csv')))
print(len(list_gyro)) # 数据长度
print(list_acce[1][2]) # 时间
print(list_gyro[1][17]) # X角速度
print(list_gyro[1][18]) # Y角速度
print(list_gyro[1][19]) # Z角速度
print(list_acce[1][29]) # X线加速度
print(list_acce[1][30]) # Y线加速度
print(list_acce[1][31]) # Z线加速度
a = 1
b = 2
tail = 0
print(len(list_acce))
for i in range(0, len(list_acce) - 1):
time = list_acce[i + 1][2]
print("进入 " + str(i) + " " + str(a) + " " 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 362
362

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









