









栅格地图,特征地图,点云地图:尺度地图(距离对应世界距离)
拓扑地图:两点是否连通,但是不管连通的路径如何。适用于大场景
语义地图:加标签的尺度地图,slam的未来,是slam与深度学习的结合。
语义地图的优点:通过语义标点可以极大的排除outliner,也可以极大的提高机器人定位的鲁棒性。

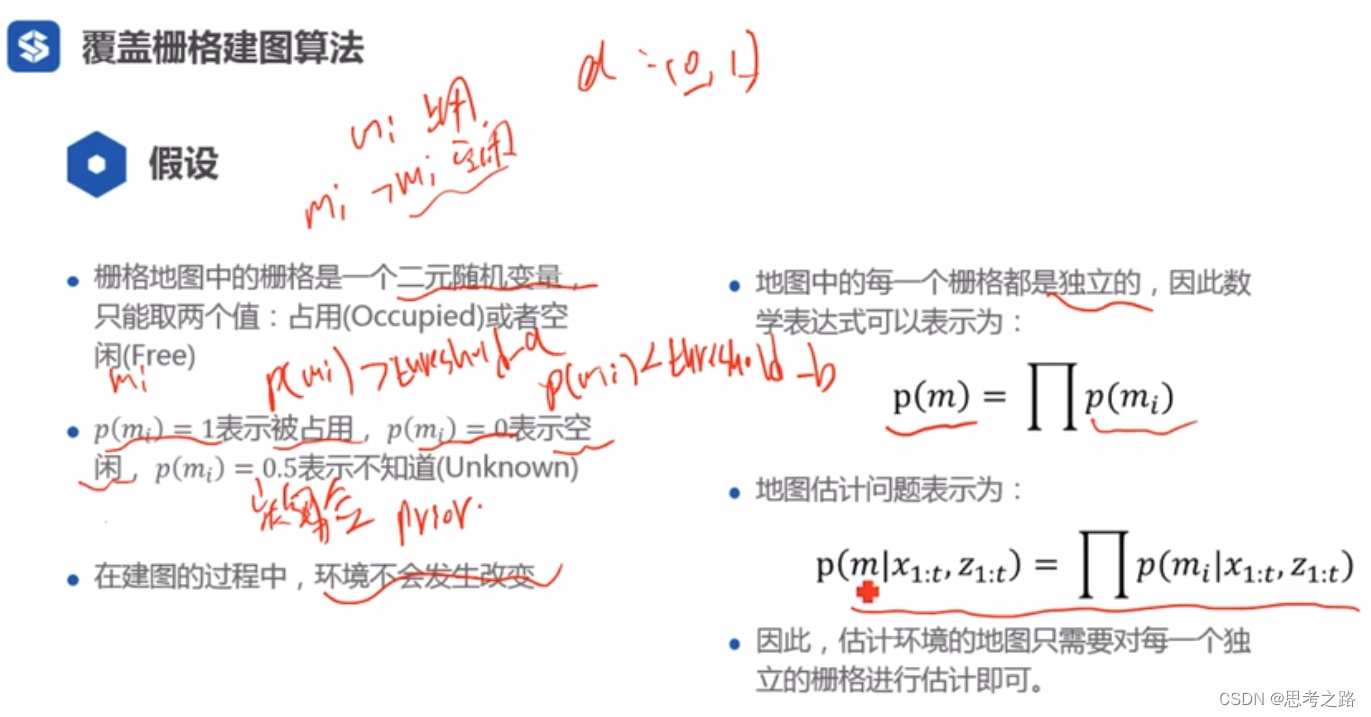
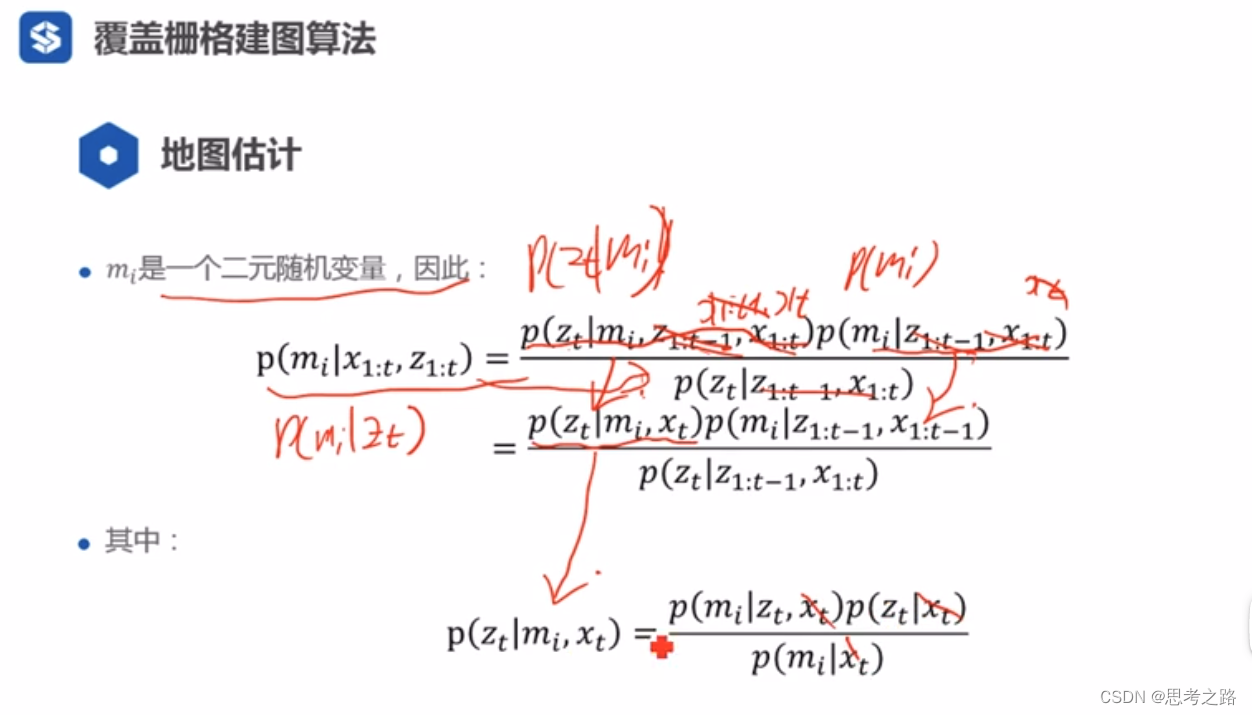
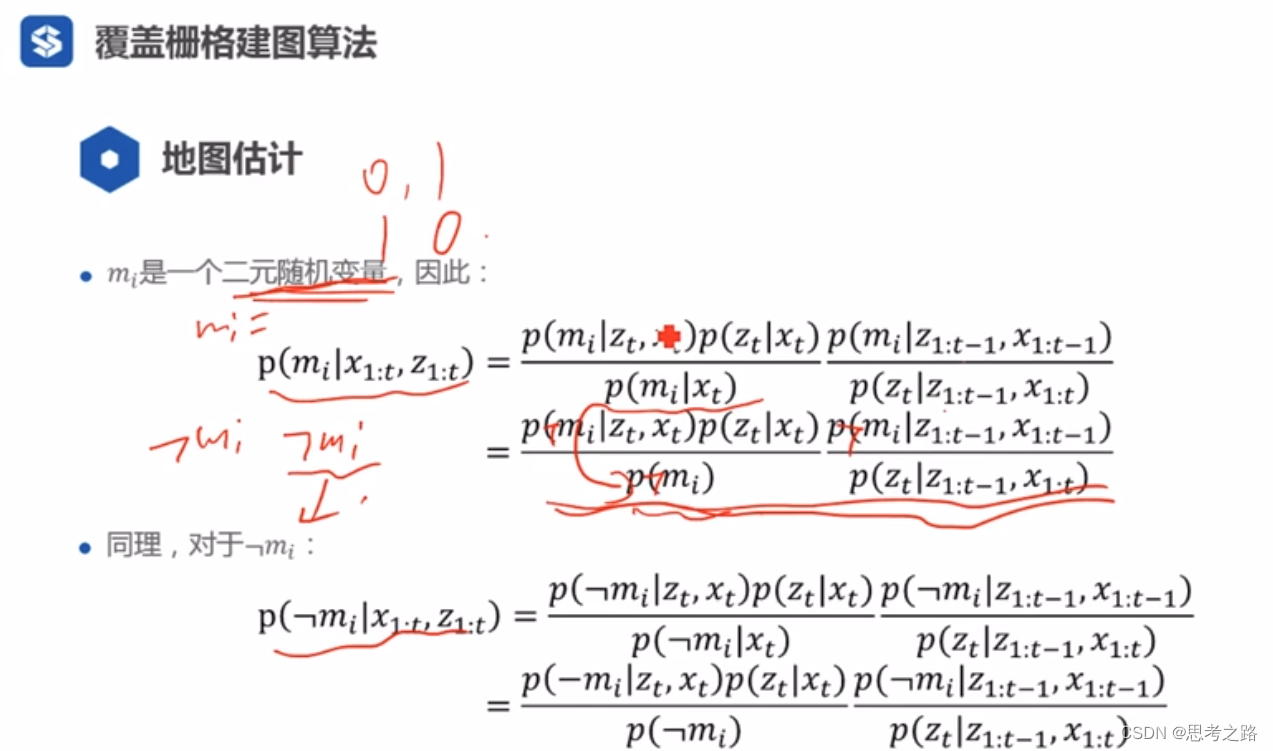
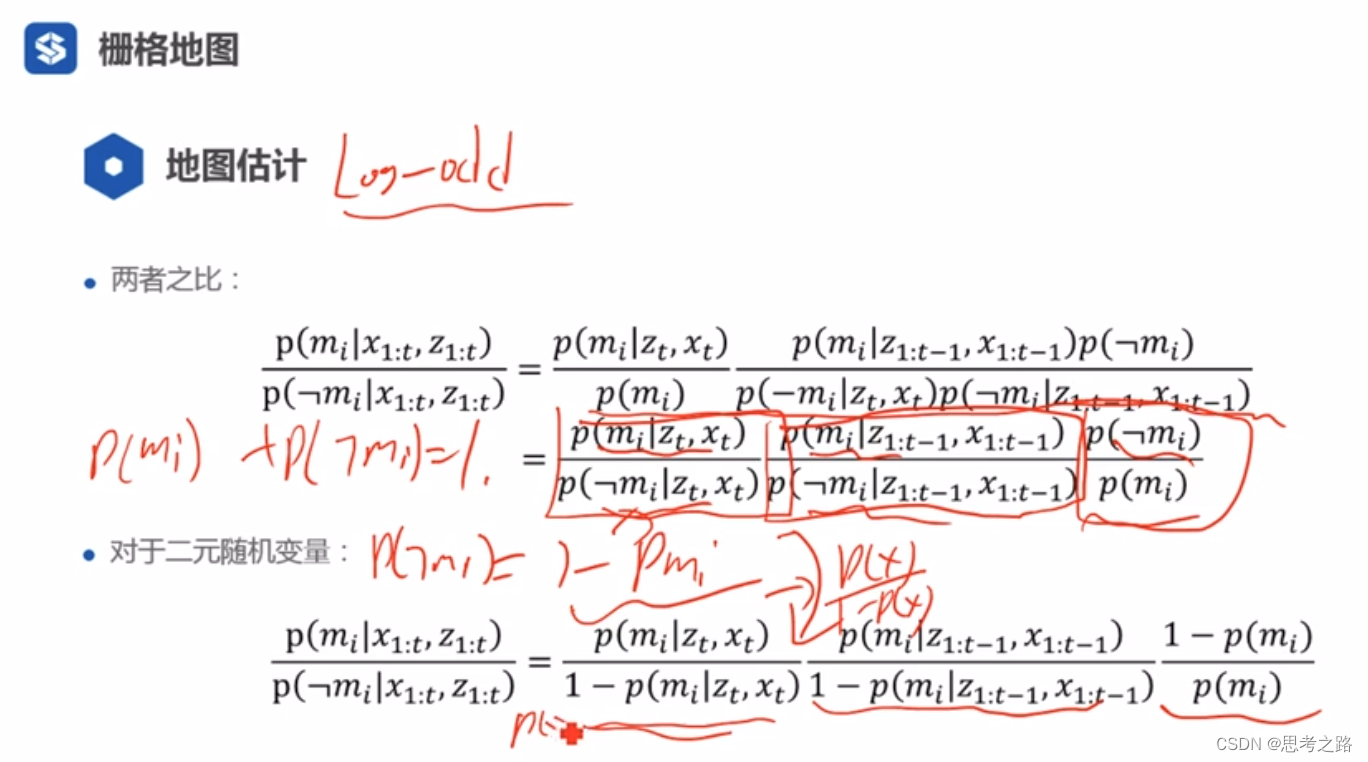
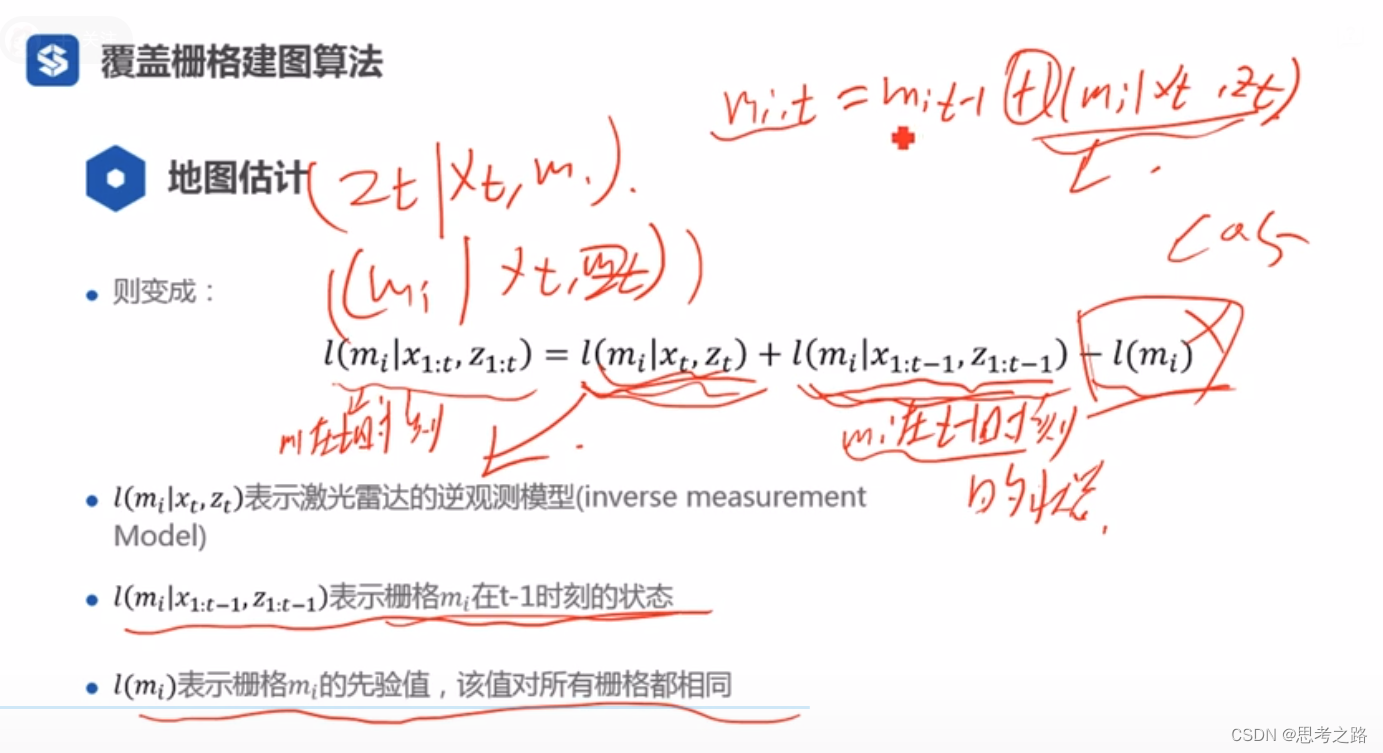
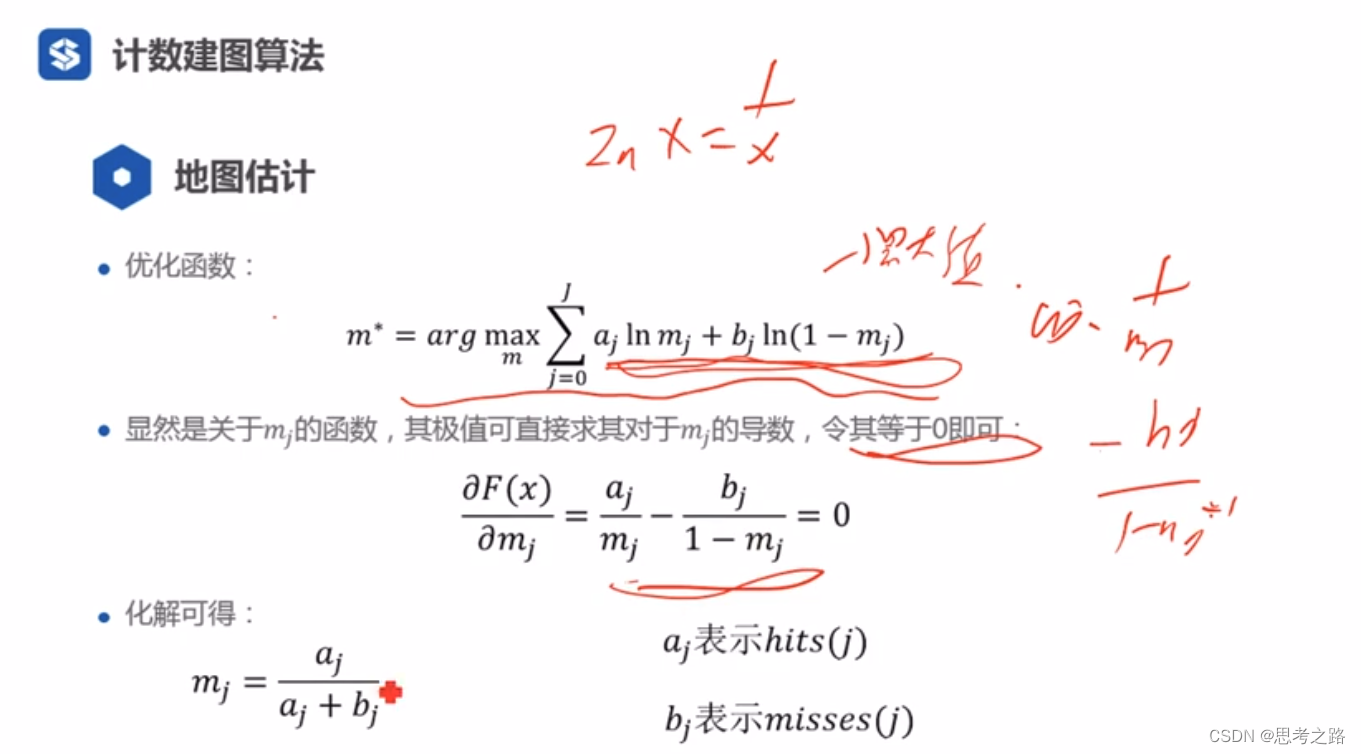
t时刻的mi(地图估计) 等与t-1时刻的mi + t时刻的激光雷达逆观测模型。
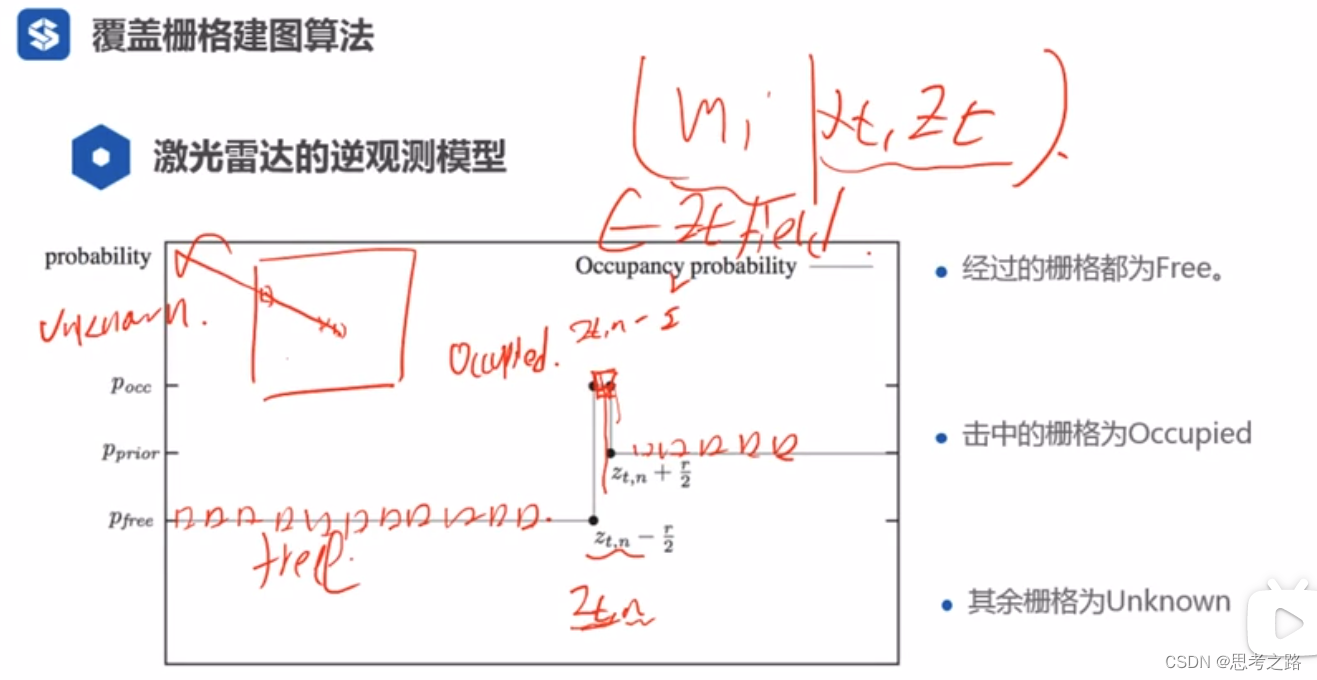

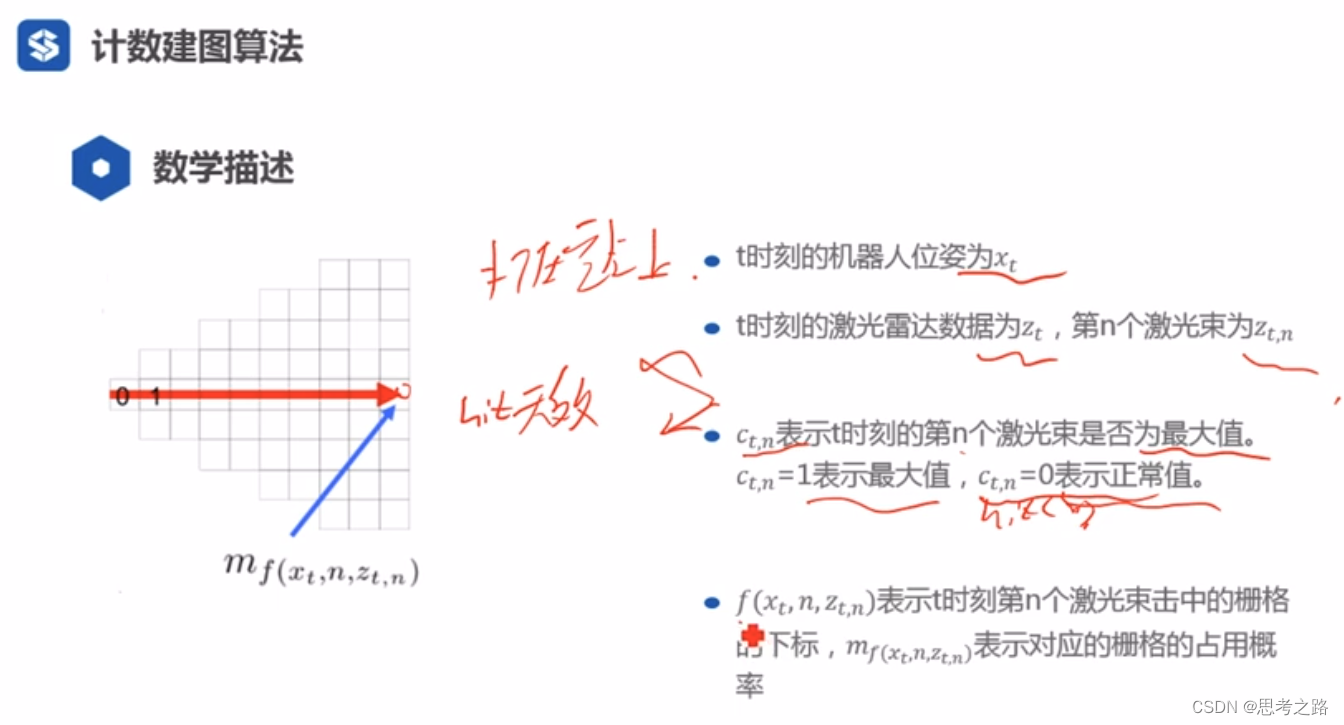
红色的线:激光通过,说明所有的栅格都是空闲,都是同时满足,所以如下式一所式。
蓝色箭头所指的地方:有一处被即中,则该处是占用,前面通过的是空闲。
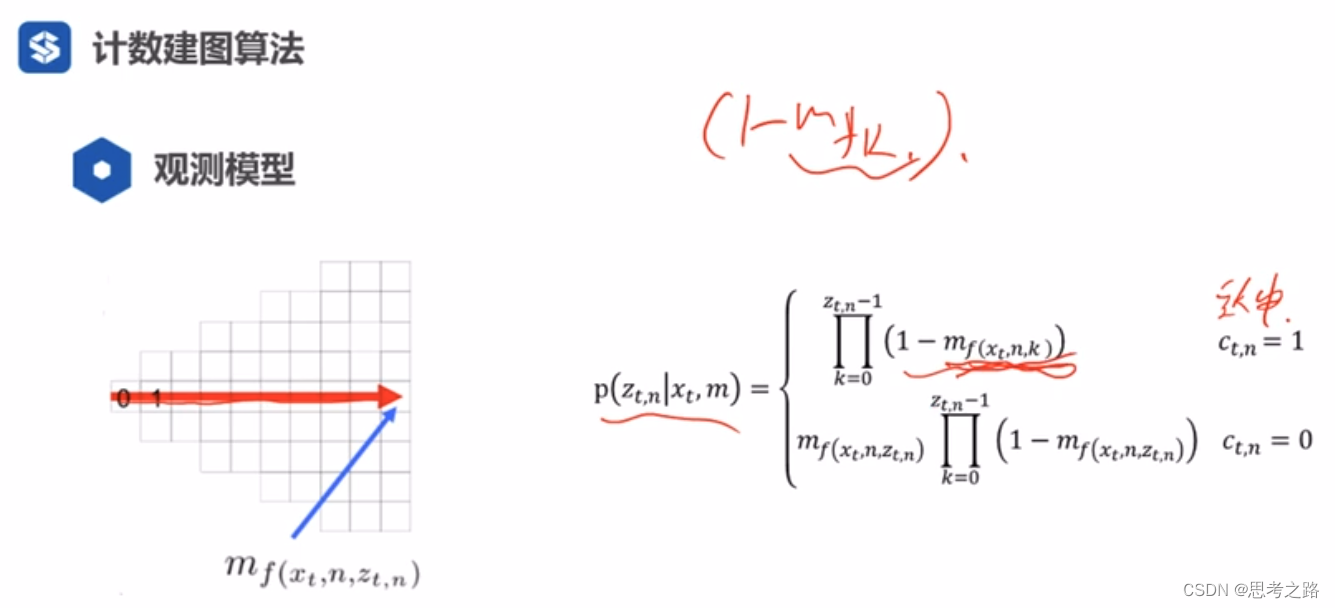
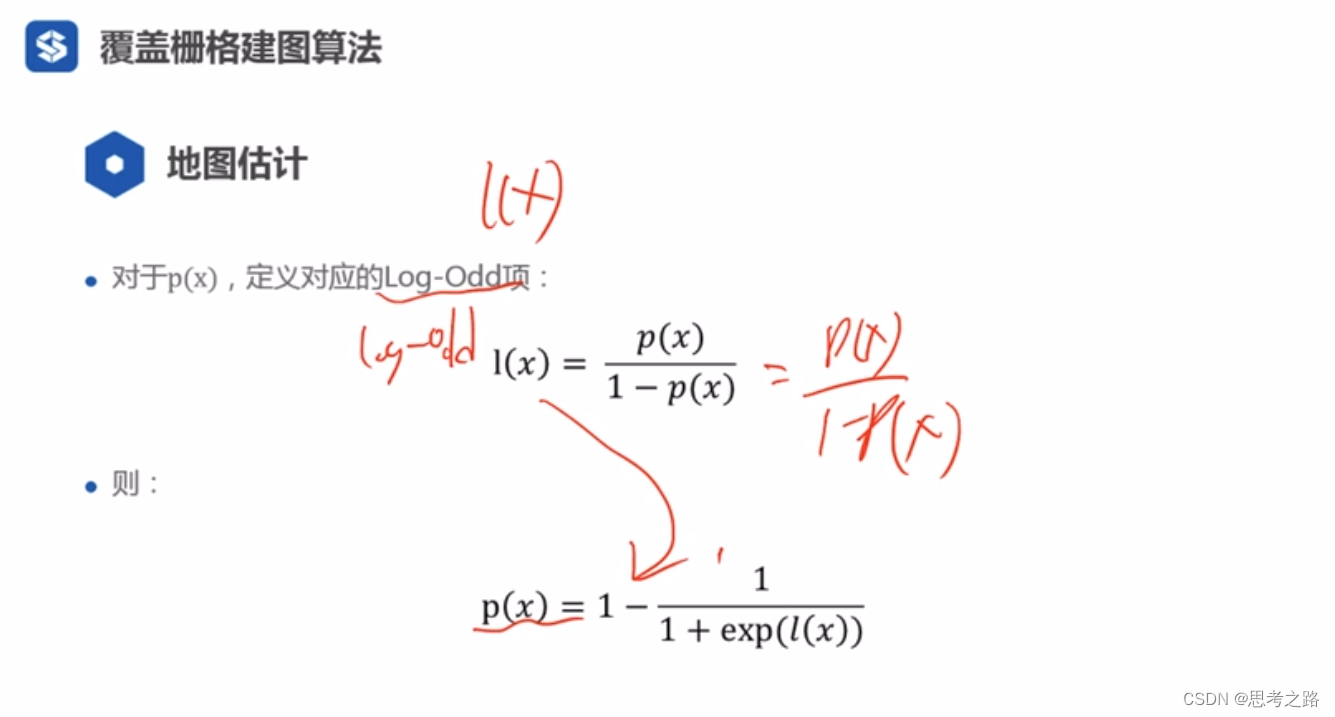
以下式子用cn,t等与1 或0 来确定是击中还是空闲














 411
411











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









