







 本文详细介绍ABB机器人在底座倾斜情况下的世界坐标系修改案例,解析如何通过修改大地坐标系确保机器人直线运动,包括使用注册表、新建例行程序及调整系统配置的具体步骤。
本文详细介绍ABB机器人在底座倾斜情况下的世界坐标系修改案例,解析如何通过修改大地坐标系确保机器人直线运动,包括使用注册表、新建例行程序及调整系统配置的具体步骤。
点击进入工业机器人学习
 作为机器人四大家族之一的ABB机器人以其领先的技术和良好的质量闻名于世,在ABB机器人中提供了大量的可选项功能以及例行程序帮助工程师减少工作量,提升工作效率。今天要介绍的是ABB机器人世界坐标系修改案例,说明一下在什么情况下会用到世界坐标系修改。
作为机器人四大家族之一的ABB机器人以其领先的技术和良好的质量闻名于世,在ABB机器人中提供了大量的可选项功能以及例行程序帮助工程师减少工作量,提升工作效率。今天要介绍的是ABB机器人世界坐标系修改案例,说明一下在什么情况下会用到世界坐标系修改。
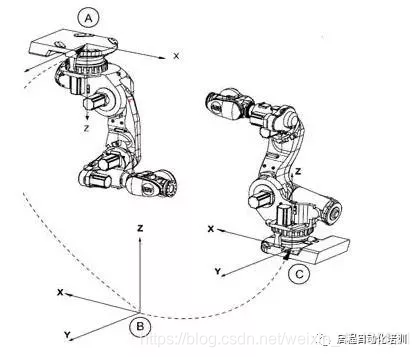
上图中A 和C是基坐标系,B是大地坐标系。正常情况下基坐标系和大地坐标系是重合的。通过这个图片我们可以看到,基坐标系是会随着机器人的移动而移动,旋转而旋转的。但是大地坐标系可以保持不动。那么什么情况下我们需要修改大地坐标系呢?请看以下案例。
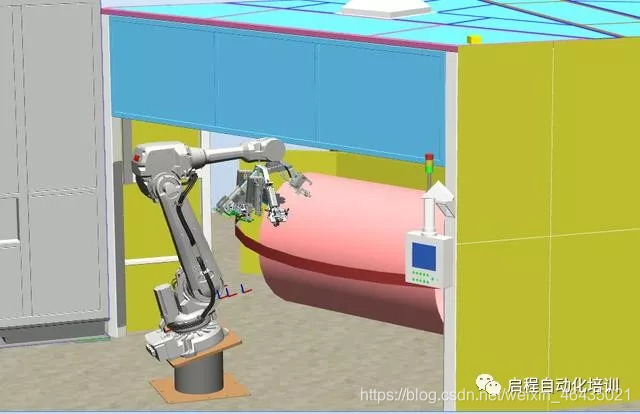
我们可以看到机器人底座是倾斜的,倾斜的底座会有什么影响吗?
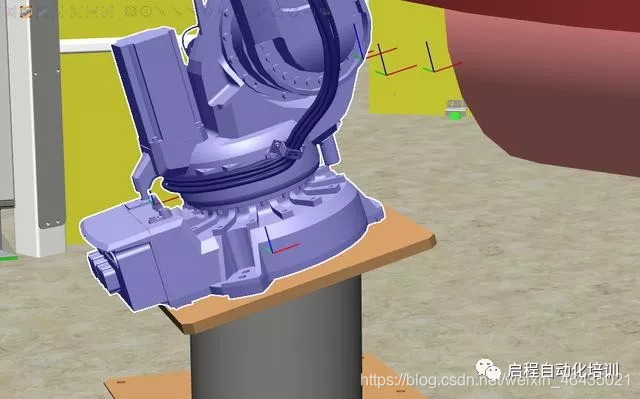
放大之后就可以发现,机器人的大地坐标系或者说基坐标系是倾斜的。在基坐标系或者大地坐标系下线性移动机器人就会发现机器人走的不再是直线了。
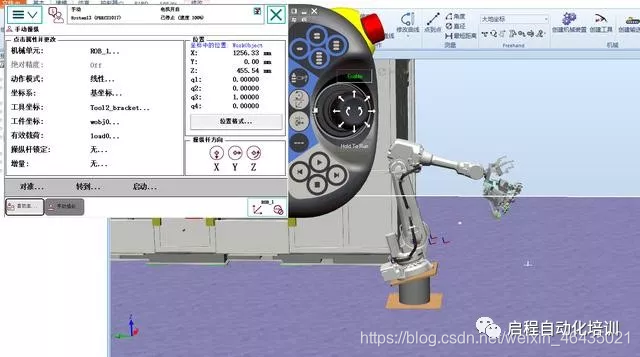
这个时候我们就需要更改大地坐标系了。机器人底座倾斜角度为15度,机器人沿着Y轴负方向旋转了15度,即-15度。
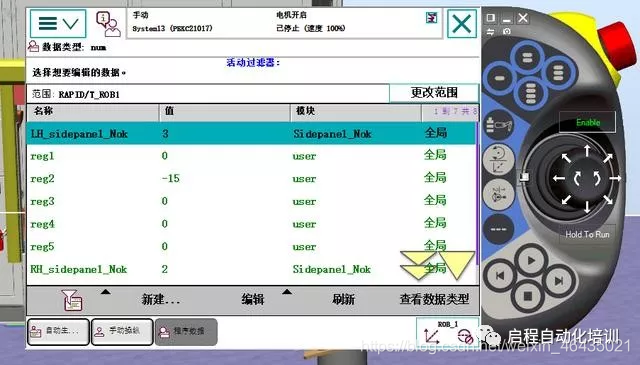
 在Num里面使用reg1、reg2和reg3,其中reg2=-15。
在Num里面使用reg1、reg2和reg3,其中reg2=-15。
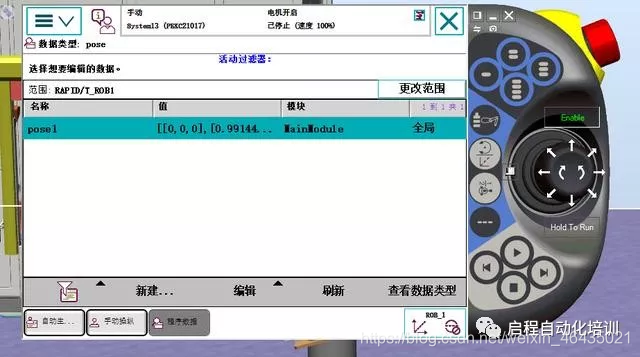
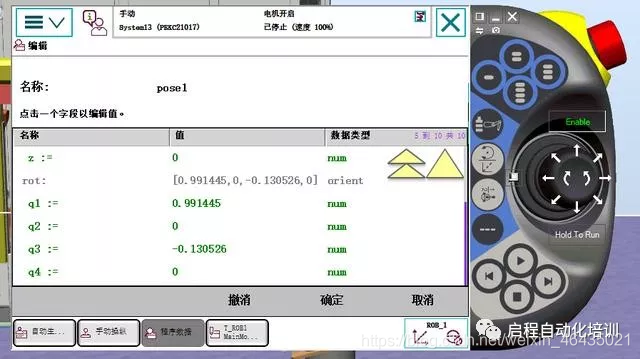
在Pose里面新建Pose1。
新建例行程序,插入指令。
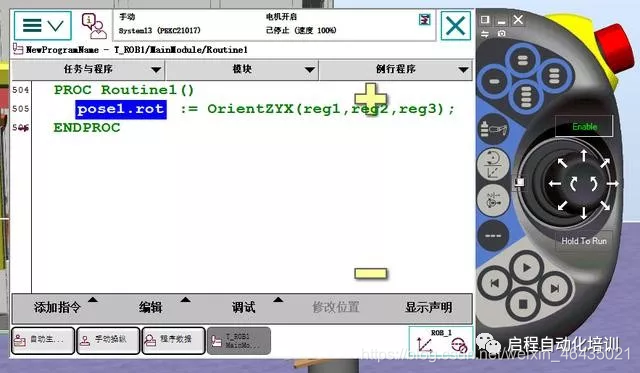 点击运行按钮,Pose1的rot参数就会出现数值。
点击运行按钮,Pose1的rot参数就会出现数值。
更改机器人系统配置文件里设置机器人基础坐标系与世界坐标系的偏差值(包含XYZ 值及Q1-Q4 的值)。更改位置:Control Panel-Configuration-Motion-Robot-Rob1。
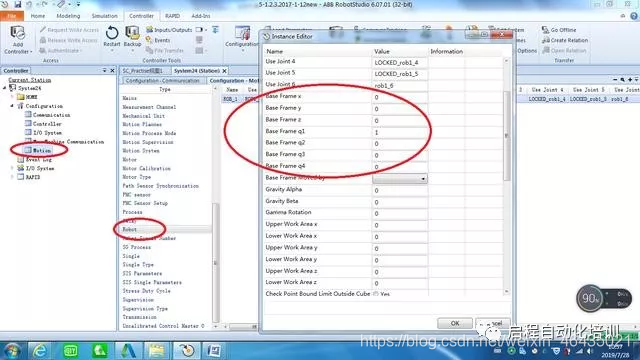
最后,修改了系统配置值后,别忘了重启机器人系统哦!
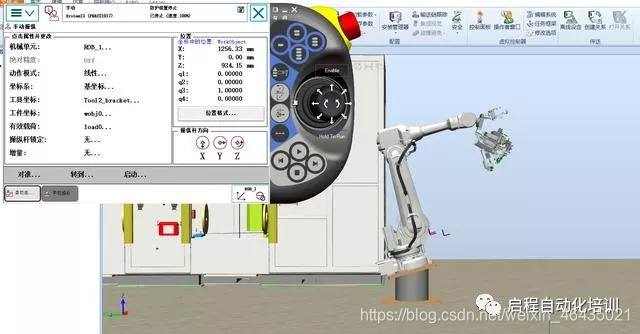
更改完成之后看一看是不是在线性坐标系下机器人开始直线运动了。还有一种做法是新建一个工件坐标系,之后移动机器人只要选择好工件坐标系就可以了。

















 5782
5782

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









