







一 RL的功能简介
RL的功能一般主要包括以下几个方面:
1. 运动学和动力学分析
- 正运动学和逆运动学:计算机器人关节位置和末端执行器位置之间的关系。
- 动力学建模:分析机器人在运动过程中的力和运动状态。
2. 控制算法
- 提供各种控制算法,如PID控制、模糊控制和鲁棒控制等,帮助实现机器人运动控制。
3. 路径规划
- 实现路径规划算法,如A*算法、RRT(快速随机树)等,用于在环境中寻找最佳路径。
4. 感知与传感器融合
- 提供工具来处理传感器数据,进行数据融合和状态估计。
5. 仿真
- 支持机器人模型的仿真,帮助开发和测试控制算法与运动规划。
6. 可视化
- 提供可视化工具,帮助用户理解机器人运动、环境和传感器数据。
7. 机器人建模
- 支持创建和管理机器人模型,便于进行分析和控制。
二 RL的代码结构简介
库的结构如下图所示:
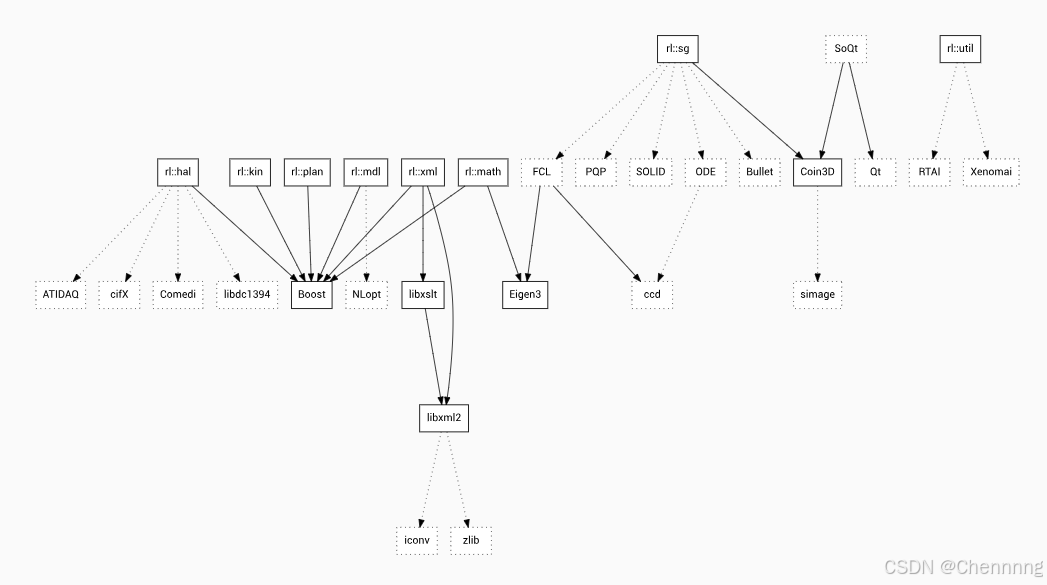
RL所依赖的包分为以下几个部分:
图形和用户界面相关包
1. SoQt:
- 作用:SoQt 是一个用于将 Open Inventor 和 Coin3D 与 Qt 结合使用的工具包。它为 Qt 应用程序提供了一个方便的接口来创建和管理 3D 图形。
- 用途:主要用于需要 3D 图形显示的 Qt 应用程序。
2. Coin3D:
- 作用:一个开源的 3D 图形库,基于 Open Inventor 标准。
- 用途:用于创建交互式 3D 图形应用程序。
3. Qt:
- 作用:一个跨平台的 C++ 图形用户界面框架。
- 用途:用于开发桌面、移动和嵌入式系统的应用程序。
机器人和运动规划相关包
4. rl:sg:
- 作用:可能是指某个特定的机器人库或模块(具体名称不详)。
- 用途:与机器人相关的功能模块。
5. rl::util:
- 作用:实用工具库,提供了常用的辅助功能。
- 用途:简化开发中的常见任务。
6. rl:hal:
- 作用:硬件抽象层,用于与机器人硬件接口。
- 用途:与各种机器人硬件进行通信。
7. rl::kin:
- 作用:运动学库,用于计算机器人关节和末端执行器的位置和姿态。
- 用途:机器人运动学计算。
8. rl::plan:
- 作用:路径规划库,用于计算机器人从一个位置到另一个位置的路径。
- 用途:机器人路径规划。
9. rl:mdl:
- 作用:模型库,用于描述和管理机器人模型。
- 用途:机器人模型管理。
10. rl::xml:
- 作用:XML 处理库,用于解析和生成 XML 数据。
- 用途:处理机器人配置和数据文件。
11. rl::math:
- 作用:数学库,提供各种数学计算功能。
- 用途:支持机器人学中的数学计算。
物理引擎和碰撞检测相关包
12. FCL(Flexible Collision Library):
- 作用:一个用于机器人、游戏和仿真中的碰撞检测库。
- 用途:碰撞检测和距离计算。
13. SOLID:
- 作用:一个用于碰撞检测的库。
- 用途:物理仿真中的碰撞检测。
14. ODE(Open Dynamics Engine):
- 作用:一个用于模拟刚体动力学的物理引擎。
- 用途:物理仿真。
15. Bullet:
- 作用:一个开源的物理引擎,支持刚体和软体物理。
- 用途:物理仿真和碰撞检测。
实时操作系统相关包
16. RTAI(Real-Time Application Interface):
- 作用:一个实时操作系统扩展,用于 Linux。
- 用途:提供实时调度和控制功能。
17. Xenomai:
- 作用:一个实时开发框架,用于 Linux。
- 用途:提供实时操作系统功能。
硬件接口相关包
18. ATIDAQ:
- 作用:用于与 ATI 力/扭矩传感器进行通信的库。
- 用途:传感器数据采集。
19. cifx:
- 作用:用于 Hilscher CIFX 卡的通信库。
- 用途:工业通信接口。
20. Comedi:
- 作用:一个用于数据采集的开源库。
- 用途:与各种数据采集设备进行通信。
21. libdc1394:
- 作用:用于 IEEE 1394 数字摄像机的库。
- 用途:摄像机数据采集。
通用库
22. Boost:
- 作用:一组 C++ 库,提供了许多扩展标准库的功能。
- 用途:各种通用编程任务。
23. NLopt:
- 作用:一个用于非线性优化的库。
- 用途:优化问题求解。
24. Eigen3:
- 作用:一个高效的 C++ 数学库,特别是用于矩阵操作。
- 用途:线性代数计算。
25. ccd:
- 作用:连续碰撞检测库。
- 用途:处理物体的连续碰撞检测。
26. simage:
- 作用:一个用于图像加载和保存的库。
- 用途:图像处理。
27. libxml2:
- 作用:一个用于解析 XML 文档的库。
- 用途:XML 解析和处理。
28. iconv:
- 作用:用于字符编码转换的库。
- 用途:字符编码转换。
29. zlib:
- 作用:一个用于数据压缩的库。
- 用途:数据压缩和解压缩。

















 1559
1559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









