







目录
本章目标
通过单摆了解非线性系统,了解相平面、稳定性、不动点等概念,中学时接触的单摆是将单摆在稳定点附近进行泰勒展开,而后简化成了一个线性系统,本章依靠非线性动力学的工具,解开非线性单摆的面纱
2.1 简介
单摆结构如下图所示:
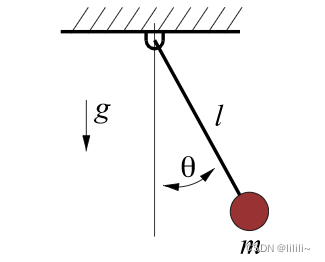
可以得到该结构的拉格朗日方程**(由于结构简单,有牛顿法也可以)**为:
m l 2 θ ¨ ( t ) + m g l sin θ ( t ) = Q m l^{2} \ddot{\theta}(t)+m g l \sin \theta(t)=Q ml2θ¨(t)+mglsinθ(t)=Q
其中Q为:
Q = − b θ ˙ ( t ) + u ( t ) Q=-b \dot{\theta}(t)+u(t) Q=−bθ˙(t)+u(t)
等号左边为机构的运动方程,右边为受力方程,u为关节处施加的外力矩,逆时针为正。
2.2非线性动力学
为了简化问题,假设输入力矩为一个常数,整理可得以下公式:
m l 2 θ ¨ + b θ ˙ + m g l sin θ = u 0 (1) m l^{2} \ddot{\theta}+b \dot{\theta}+m g l \sin \theta=u_{0} \tag{1} ml2θ¨+bθ˙+mglsinθ=u0(1)
1式是一个相对简单的非线性方程,如果可以通过理论求解,得到θ与时间t的关系,也就得到了单摆在不同时间的旋转角度,但是这样求解过于麻烦,而且存在大量的非线性方程没有解析解。此时只能利用非线性动力学的工具进行求解了。当然,非线性动力学的工具也有它的问题,它更能求解系统的长期表现,或者说稳态表现,对系统瞬态的姿态式无能为力的。
2.2.1过阻尼单摆
先从简单的开始,假设单摆运动的阻尼相当大(比如单摆在蜂蜜里摆),此时系统的惯性力可以忽略,因此可以将1式简化成:
m l 2 θ ¨ + b θ ˙ ≈ b θ ˙ = u 0 − m g l sin θ m l^{2} \ddot{\theta}+b \dot{\theta} \approx b \dot{\theta}=u_{0}-m g l \sin \theta ml2θ¨+bθ˙≈bθ˙=u0−mglsinθ
暂时抛弃这个方程的单摆身份(把θ变成x),忽略θ的周期性,将方程改写为:
b x ˙ = u 0 − m g l sin x (2) b \dot{x}=u_{0}-m g l \sin x\tag{2} bx˙
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2941
2941

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











