






0. 这篇文章干了啥?
近年来,我们见证了多模态大型语言模型(MLLMs)的重大突破,这些模型能够整合语言、图像、音频等多种模态,从而加速了具身人工智能(Embodied AI)的发展。然而,能够处理现实世界多项任务的通用智能体尚未出现。这本质上是因为现有的MLLMs通过学习从感知到动作的直接映射来执行动作,忽略了世界的动态性以及动作与世界动态之间的关系。相比之下,人类拥有世界模型,能够基于三维内部视觉表征模拟未来状态并据此规划动作。因此,探索如何构建智能体的世界模型对于具身智能的发展至关重要。
自动驾驶作为具身AI的一个代表性应用,在世界模型方面已经进行了广泛的研究。然而,自动驾驶世界模型的精确定义仍然是一个开放性问题。当前自动驾驶的世界模型主要关注传感器预测任务,如视频预测、点云预测和占用率预测。然而,它们无法同时实现场景演变预测、语言推理以及与现实世界的交互。因此,我们提出,一个能够统一视觉、语言和动作(VLA)建模的模型,类似于人类的能力,将是自动驾驶世界模型的一个有前景的候选者。
然而,构建VLA世界模型面临两个关键挑战需要解决。首先是构建一个既便于理解又便于生成的通用三维视觉表征;其次是开发一个能够容纳VLA模态的多模态框架。近年来,语义占用率(Occ)作为一种通用三维视觉表征受到了广泛关注。它既能描述细粒度的三维结构,又包含高级语义信息,非常适合于空间和语义的对齐。同时,基于自回归语言模型的视觉生成可行性已经得到了充分验证,其性能可与专注于视觉生成的扩散模型相媲美。这些为应对挑战并基于具有Occ视觉表征的自回归模型构建VLA世界模型提供了有价值的见解。
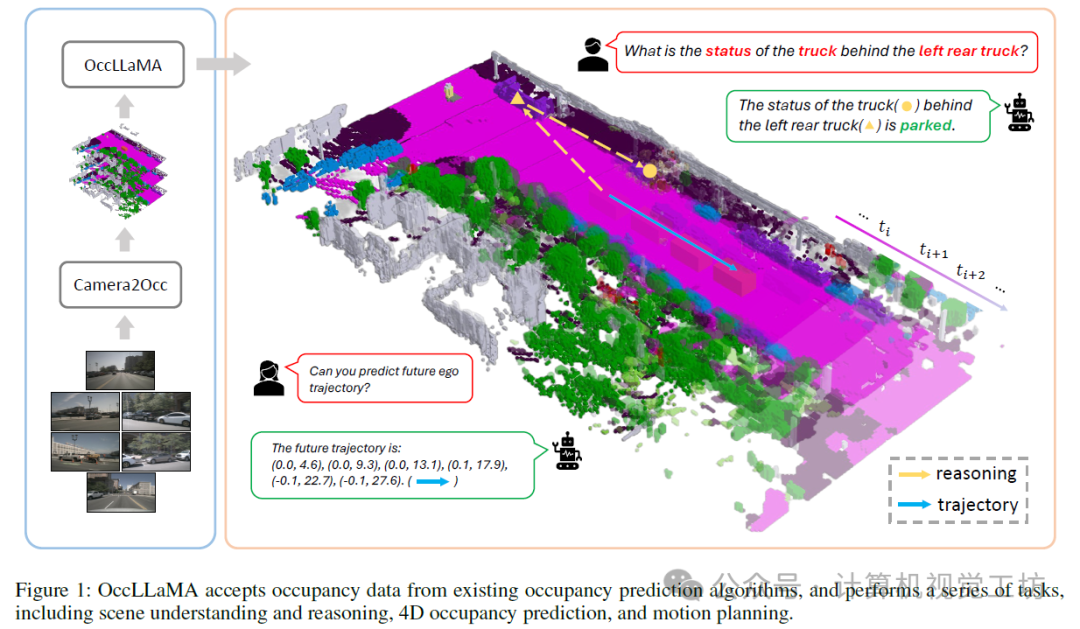
基于上述观察,我们提出了OccLLaMA,一个统一的三维占用率-语言-动作生成式世界模型,它统一了与VLA相关的任务,包括但不限于场景理解、规划和四维占用率预测,如图1所示。为了使OccLLaMA具备理解和生成视觉模态的能力,我们选择Occ作为通用视觉表征,并引入了一种新颖的场景分词器,以有效构建离散场景词汇,同时考虑稀疏性和类别不平衡问题。然后,通过结合场景词汇、语言词汇和动作词汇,我们为VLA任务构建了一个统一的多模态词汇表,为在单个模型中集成VLA奠定了基础。此外,我们增强了大型语言模型(特别是LLaMA),以实现在统一多模态词汇表上的下一个标记/场景预测,从而构建了一个类似于人类的世界模型。
下面一起来阅读一下这项工作~
1. 论文信息
标题:OccLLaMA: An Occupancy-Language-Action Generative World Model for Autonomous Driving
作者:Julong Wei, Shanshuai Yuan, Pengfei Li, Qingda Hu, Zhongxue Gan, Wenchao Ding
机构:复旦大学、清华大学
原文链接:https://arxiv.org/abs/2409.03272
2. 摘要
多模态大语言模型的兴起刺激了其在自动驾驶中的应用。最近基于MLLM的方法通过学习从感知到动作的直接映射来执行动作,忽略了世界的动态以及动作和世界动态之间的关系。相比之下,人类拥有世界模型,使他们能够基于3D内部视觉表示来模拟未来状态,并相应地计划行动。为此,我们提出OccLLaMA,一个占据-语言-动作生成世界模型,它使用语义占据作为一般的视觉表示,并通过自回归模型统一视觉-语言-动作(VLA)模态。具体来说,考虑到场景的稀疏性和类别的不平衡性,我们引入了一种新的类VQVAE场景标记器来有效地离散和重建语义占据场景。然后,我们为视觉、语言和动作建立一个统一的多模态词汇。此外,我们增强了LLM,特别是LLaMA,以在统一的词汇上执行下一个令牌/场景预测,以完成自动驾驶中的多个任务。大量实验表明,OccLLaMA在多项任务中取得了具有竞争力的性能,包括4D占用预测、运动规划和视觉问题回答,展示了其作为自动驾驶基础模型的潜力。
3. 效果展示
4. 主要贡献
我们的贡献总结如下:
• 提出了一个占用率-语言-动作生成式世界模型OccLLaMA,该模型使用Occ作为视觉表征,并通过统一的多模态词汇表和基于LLaMA增强的自回归模型涉及多个任务。推荐课程:Transformer如何在自动驾驶领域一统江湖!
• 设计了一种新颖的场景分词器,该分词器在考虑稀疏性和类别不平衡的情况下,能够高效地离散化和重构Occ场景。
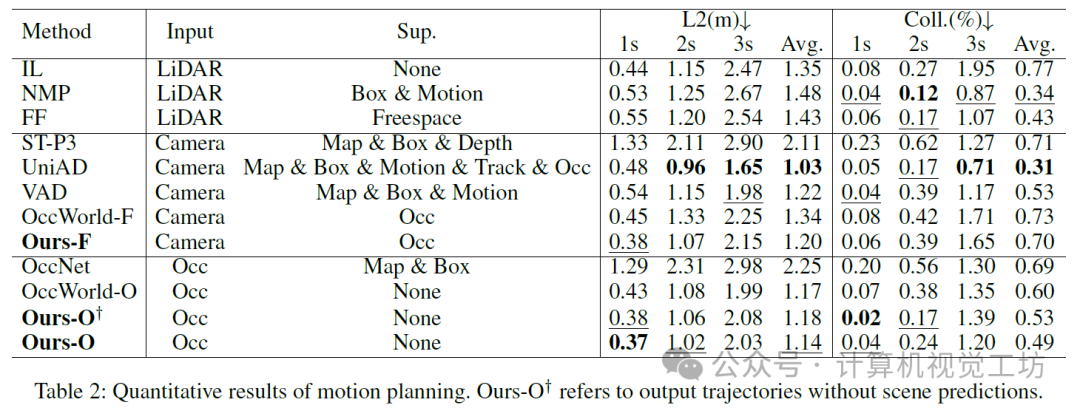
• 与最先进的方法进行了广泛的实验比较,在包括四维占用率预测、运动规划和视觉问答在内的多个任务上取得了具有竞争力的性能。
5. 基本原理是啥?
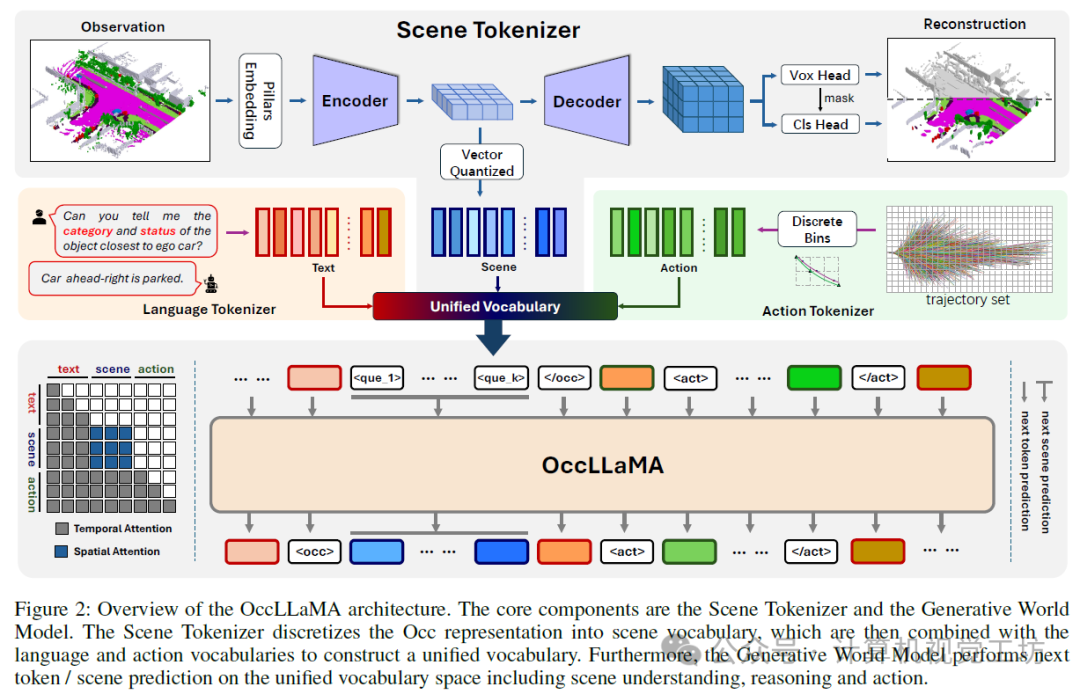
我们提出了OccLLaMA,一个统一的占用-语言-动作框架。如图2所示,OccLLaMA的核心组件包括场景分词器和占用-语言-动作生成式世界模型。为了处理多任务,我们为场景分词器训练、占用-语言-动作预训练和指令调优引入了一个三阶段训练方案。
6. 实验结果


7. 总结 & 未来工作
在本文中,我们提出了OccLLaMA,一个用于自动驾驶多任务的三维占用-语言-动作生成式世界模型。我们引入了一种新颖的场景分词器,用于离散化和重建占用场景。此外,我们构建了一个统一的多模态词汇表,涵盖了占用、语言和动作模态。基于该词汇表,我们使大型语言模型(LLM)适应于执行下一个标记/场景预测,以完成多任务。通过在4D占用预测、运动规划和视觉问答(VQA)上的广泛实验,我们证明了OccLLaMA的多任务有效性。在未来,我们将增加数据多样性,以进一步增强OccLLaMA的能力。我们还将探索模型量化和蒸馏,以解决由大量参数引起的推理延迟问题。
对更多实验结果和文章细节感兴趣的读者,可以阅读一下论文原文~
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊提供35个顶会论文的课题如下:
如何发表一篇顶会!涉及3DGS、位姿估计、SLAM、三维点云、图像增强、3D目标检测等方向
1、基于环境信息的定位,重建与场景理解
2、轻是级高保真Gaussian Splatting
3、基于大模型与GS的 6D pose estimation
4、在挑战性遮挡环境下的GS-SLAM系统研究
5、基于零知识先验的实时语义地图构建SLAM系统
6、基于3DGS的实时语义地图构建
7、基于文字特征的城市环境SLAM
8、面向挑战性环境的SLAM系统研究
9、特殊激光传感器融合视觉的稠密SLAM系统
10、基于鲁棒描述子与特征匹配的特征点法SLAM
11、基于yolo-world的语义SL系统
12、基于自监督分割的挑战性环境高斯SLAM系统
13、面向动态场景的视觉SLAM系统研究
14、面向动态场景的GS-SLAM系统研究
15、集成物体级地图的GS-SLAM系统
16、挑战场景下2D-2D,2D-3D或3D-3D配准问题
17、未知物体同时重建与位姿估计问题类别级或开放词汇位姿估计问题
18、位姿估计中的域差距问题
19、可形变对象(软体)的实时三维重建与非刚性配准
20、机器人操作可形变对象建模与仿真
21、基于图像或点云3D目标检测、语义分割、轨迹预测.
22、医疗图像分割任务的模型结构设计
23、多帧融合的单目深度估计系统研究
24、复杂天气条件下的单目深度估计系统研究高精度的单目深度估计系统研究
25、基于大模型的单目深度估计系统研究
26、高精度的光流估计系统多传感器融合的单目深度估计系统研究
27、基于扩散模型的跨域鲁棒自动驾驶场景理解
28、水下图像复原/增强
30、Real-World图像去雾(无监督/物理驱动)
31、LDR图像/视频转HDR图像/视频
32、光场图像增强/复原/超分辨率
33、压缩后图像/视频的增强/复原
34、图像色彩增强(image retouching)















 426
426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









