






近年来,SLAM技术发展非常迅速,在学术层面和应用层面都有不小的进步。SLAM领域的从业者快速增加,但是仍然有很大的缺口,很多企业为了招到高精的工程师都开出了极具竞争力的薪酬。下面为某招聘网站上对激光SLAM岗位的要求和待遇。

SLAM技术从大的类别来讲,可以分为激光SLAM和视觉SLAM,激光SLAM建图精度高,但是激光雷达价格比较贵,视觉SLAM的性能目前还和激光SLAM有一定差距,然而相机成本低,也在快速发展之中。激光SLAM相对更成熟一点,门槛也更高一点。
从哪里开始学起,怎样才能更高效的学习,进入相关企业需要达到什么样的要求,这也是很多初学者面临的难题。
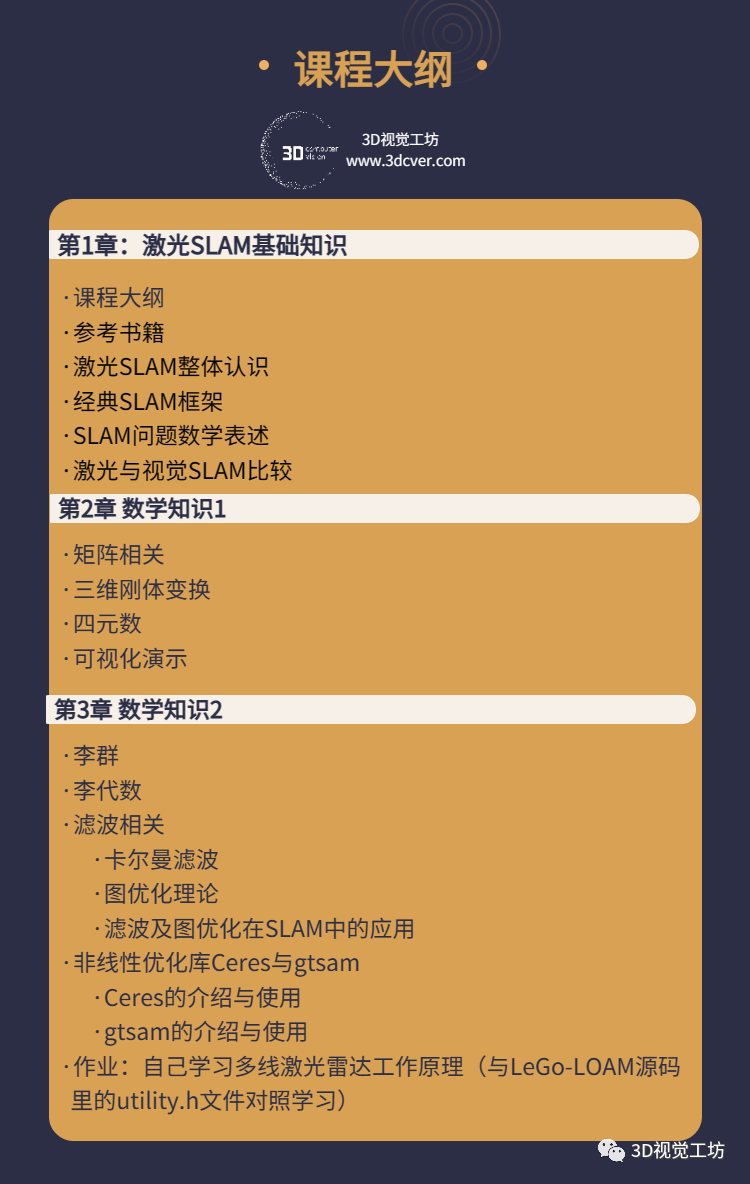
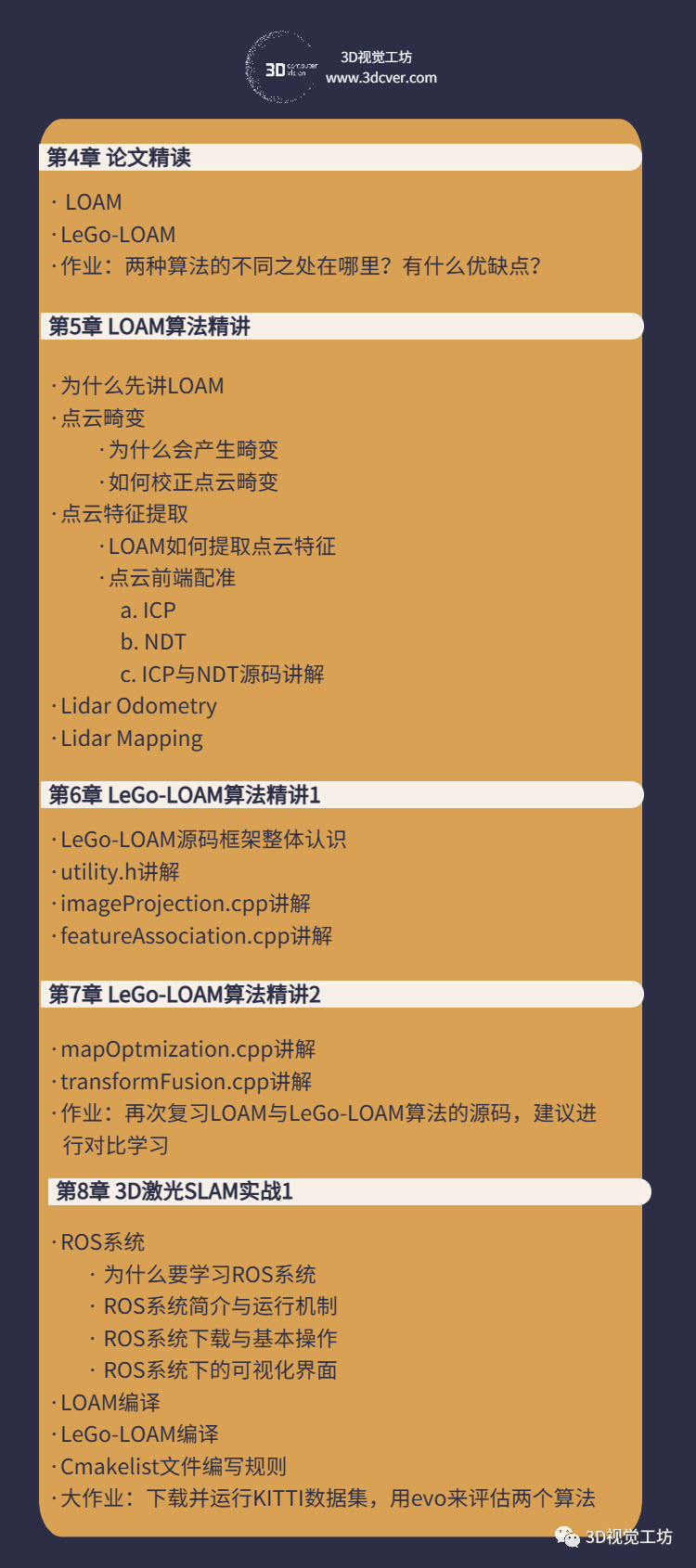
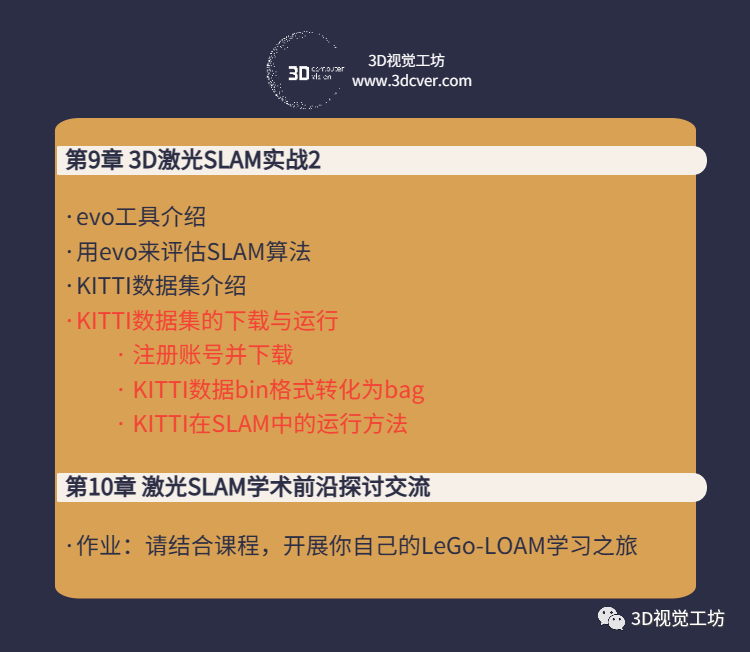
根据小编的多年经验,总结了三点:首先,要有扎实的数学基础;其次,要对整个SLAM大框架及细节部分理解到一定深度;再次,要有比较高度的编程能力。这三点都绝非易事,需要花很大的功夫,中间也有不少弯路要走。所以这门课程的推出,一方面是带领大家入门基于LeGo-LOAM框架的3D激光SLAM技术,另一方面是教大家高效的SLAM学习方法。LeGo-LOAM在工业中有非常广泛的应用,也是应聘者必须掌握的框架。
相对于LOAM算法,LeGo-LAOM能够进行地面优化,同时保证了轻量级,也加入了回环检测模块。本课程从必备的数学知识,到算法框架、源码,再到最后的实践,力求衔接清晰,通俗易懂,便于大家消化吸收。
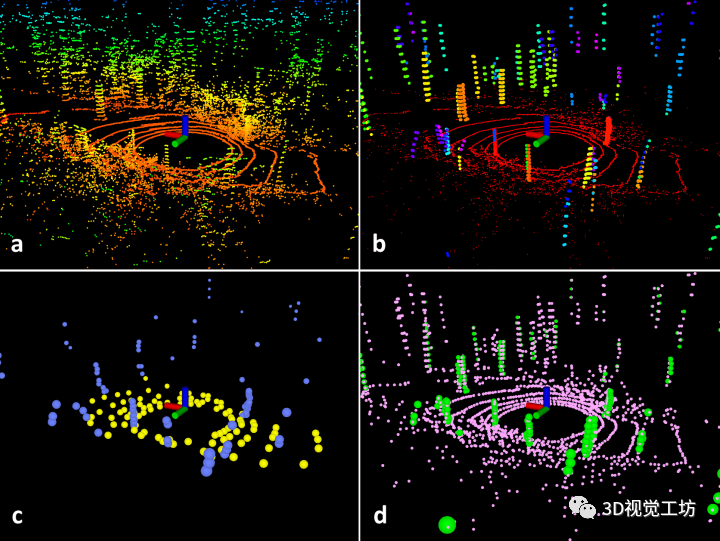
LeGo-LOAM地面优化
LeGO-LOAM运行效果展示:
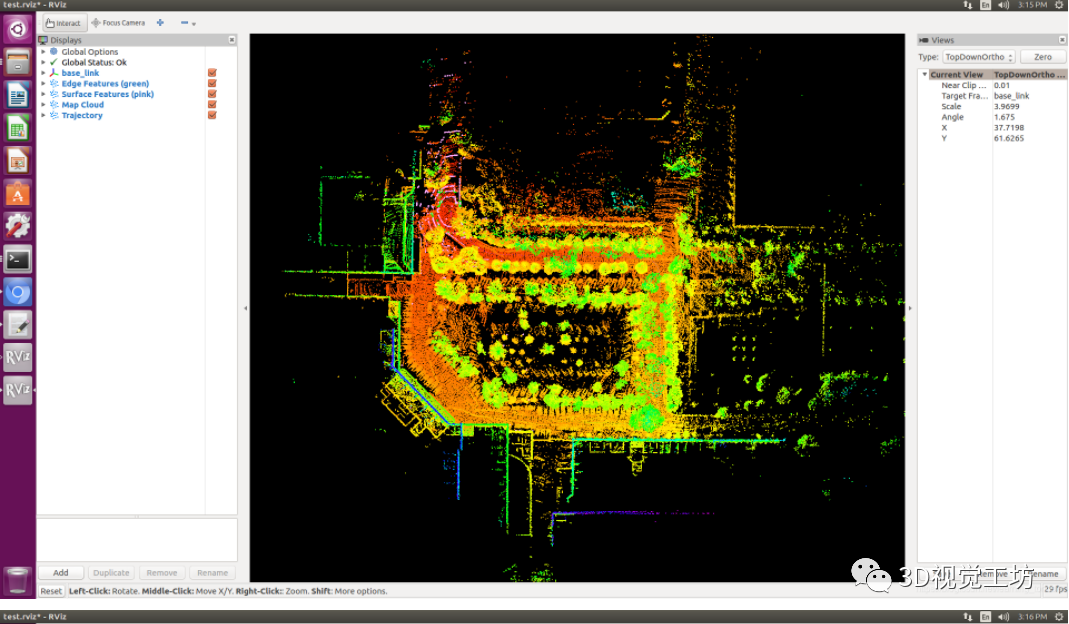
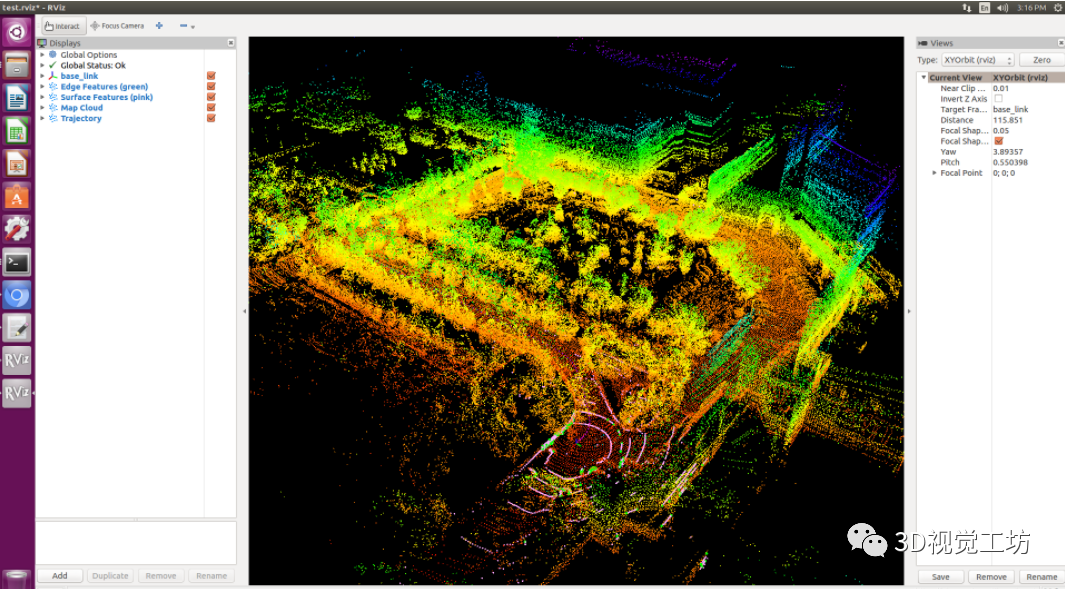
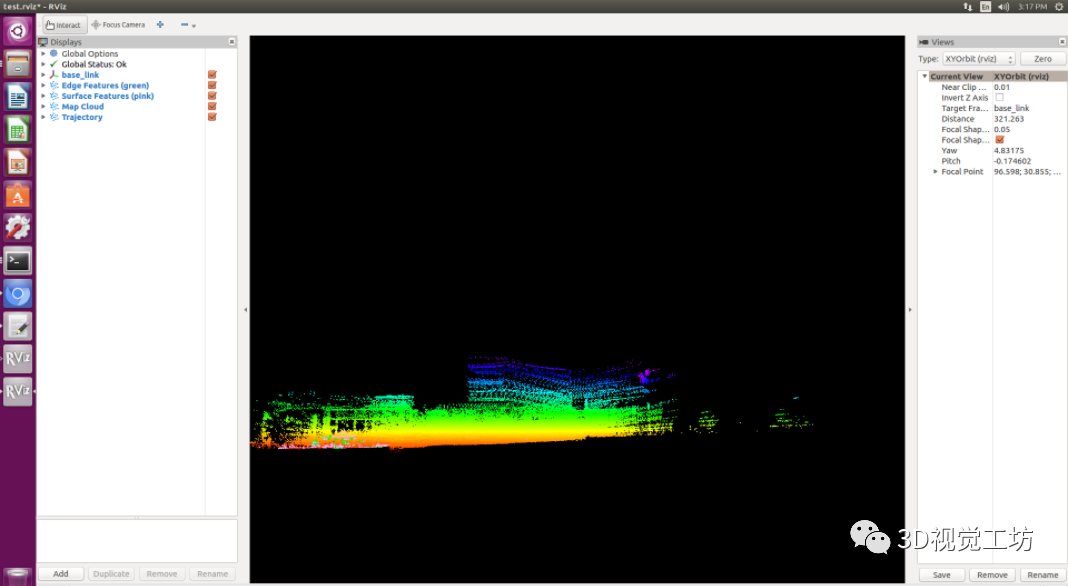
<<< 左右滑动见更多 >>>
如何学习















 185
185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









