









有两个版本的ORB-SLAM2,笔者的环境是ubuntu20.04,OpenCV3.4.15,pangolin v0.6(pangolin最新和v0.5亲测Not OK)
一个是Git上开源的Original版本,BUG比较多。
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2另一个是高博的改进版本,优化了很多bug,而且加入了3D点云。
https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map笔者将两个版本都调通了,接下来说以下在调试过程中遇到的一些bug的处理过程:
先说原版吧:
1.build.sh 编译过程中大段报错,都C++11/14找不到库有关,比如
‘slots_reference’ was not declared in this scope具体报错可以参考
https://github.com/UZ-SLAMLab/ORB_SLAM3/issues/458解决的方法就是把build文件夹删除,在终端打一句
sed -i 's/++11/++14/g' CMakeLists.txt之后再重新编译即可
2.报错:
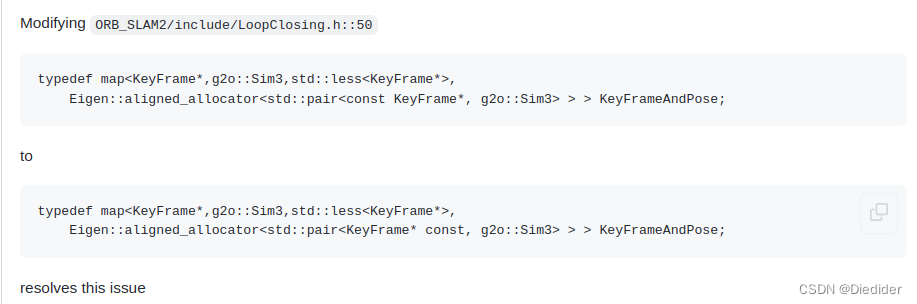
error: static assertion failed: std::map must have the same value_type as its allocator
static_assert(is_same<typename _Alloc::value_type, value_type>::value,这个可以参考
https://github.com/raulmur/ORB_SLAM2/pull/585这篇文字上的解答,具体需要:
再说说高博版本:
这个帖子中写了基本的编译和关于PCL点云处理的一些方法。
https://blog.csdn.net/creative1/article/details/122115215?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522165527909516781432929460%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=165527909516781432929460&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v33_ecpm-4-122115215-null-null.142^v16^rank_v33,157^v14^new_3&utm_term=ORBSLAM2_with_pointcloud_map&spm=1018.2226.3001.4187遇到的最主要的问题就是OpenCV版本,Eigen版本,PCL版本等问题,
PCL编译报错很多的时候,需要直接在CMakelist里面指定C++版本为14后重新编译,更改以后的Cmakelist如下:
cmake_minimum_required(VERSION 2.8)
project(ORB_SLAM2)
set(CMAKE_CXX_STANDARD 14)
#在这里直接指定编译版本
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
#set(CMAKE_CXX_COMPILER "clang++")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
#这里Pkg的版本号除了点云的全部干掉
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
set(OpenCV_DIR /usr/local/lib)
find_package(OpenCV REQUIRED)
find_package(Eigen3 REQUIRED)
find_package(Pangolin REQUIRED)
find_package(G2O REQUIRED)
find_package( PCL 1.7 REQUIRED )
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/include
${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
add_definitions( ${PCL_DEFINITIONS} )
link_directories( ${PCL_LIBRARY_DIRS} )
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
add_library(${PROJECT_NAME} SHARED
src/System.cc
src/Tracking.cc
src/LocalMapping.cc
src/LoopClosing.cc
src/ORBextractor.cc
src/ORBmatcher.cc
src/FrameDrawer.cc
src/Converter.cc
src/MapPoint.cc
src/KeyFrame.cc
src/Map.cc
src/MapDrawer.cc
src/Optimizer.cc
src/PnPsolver.cc
src/Frame.cc
src/KeyFrameDatabase.cc
src/Sim3Solver.cc
src/Initializer.cc
src/Viewer.cc
src/pointcloudmapping.cc
)
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${PROJECT_SOURCE_DIR}/Thirdparty/DBoW2/lib/libDBoW2.so
g2o_core g2o_types_slam3d g2o_solver_csparse g2o_stuff g2o_csparse_extension g2o_types_sim3 g2o_types_sba
${PCL_LIBRARIES}
)
# Build examples
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/RGB-D)
add_executable(rgbd_tum
Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME})
add_executable(rgbd_my
Examples/RGB-D/rgbd_my.cc)
target_link_libraries(rgbd_my ${PROJECT_NAME})
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Stereo)
add_executable(stereo_kitti
Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME})
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/Examples/Monocular)
add_executable(mono_tum
Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum ${PROJECT_NAME})
add_executable(mono_kitti
Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti ${PROJECT_NAME})















 1225
1225











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









