









RLException: Invalid roslaunch XML syntax: no element found: line 16, column 8
The traceback for the exception was written to the log file
 错因:再代码的结束行未添加“/”符号
错因:再代码的结束行未添加“/”符号
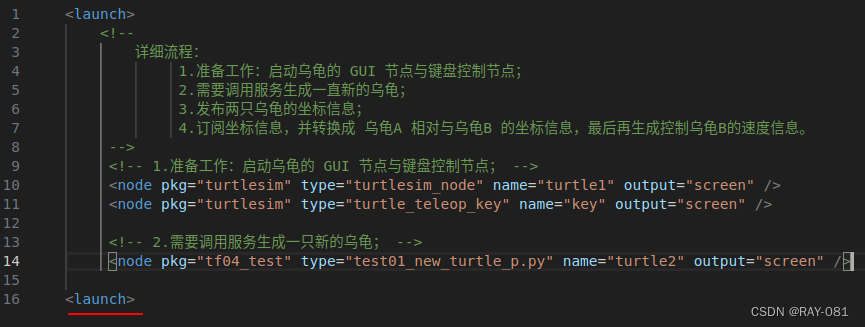
修改后的代码:
<launch>
<!--
详细流程:
1.准备工作:启动乌龟的 GUI 节点与键盘控制节点;
2.需要调用服务生成一直新的乌龟;
3.发布两只乌龟的坐标信息;
4.订阅坐标信息,并转换成 乌龟A 相对与乌龟B 的坐标信息,最后再生成控制乌龟B的速度信息。
-->
<!-- 1.准备工作:启动乌龟的 GUI 节点与键盘控制节点; -->
<node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="key" output="screen" />
<!-- 2.需要调用服务生成一只新的乌龟; -->
<node pkg="tf04_test" type="test01_new_turtle_p.py" name="turtle2" output="screen" />
</launch>














 3401
3401











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









