







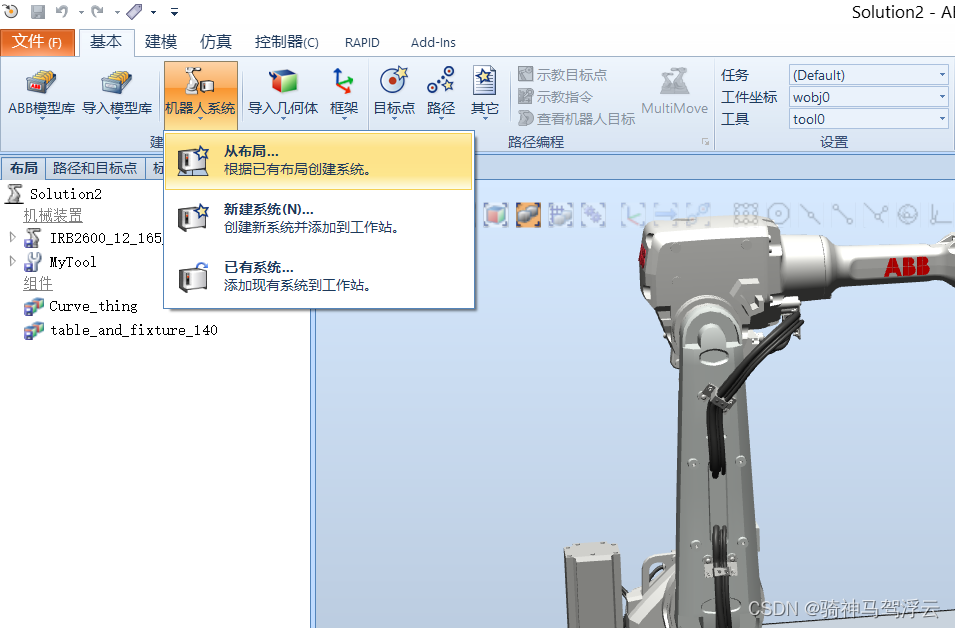
一、在“基本”功能选项卡下, 单击“机器人系统”的 “从布局……”。
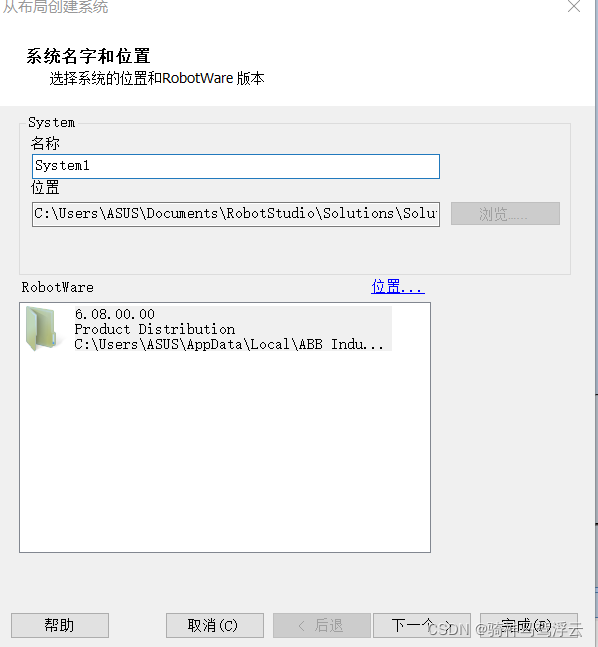
二、设置好系统名与保存位置后,“无脑”下一步直至完成
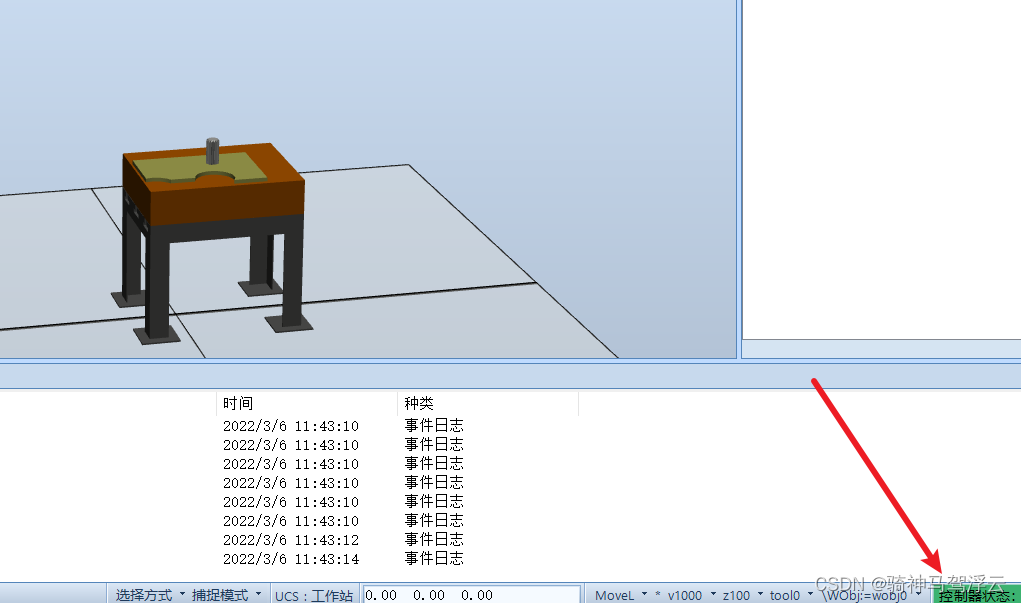
三、系统建立完成后,右下角“控制器状态”应为绿色。
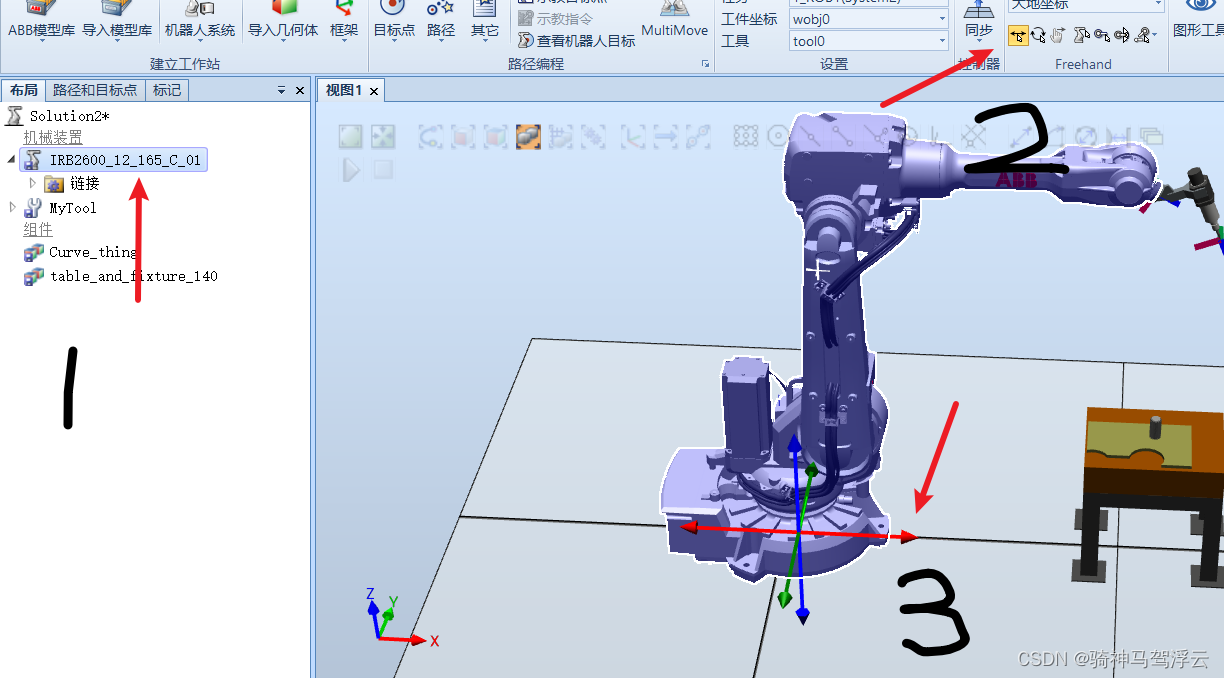
四、移动机器人
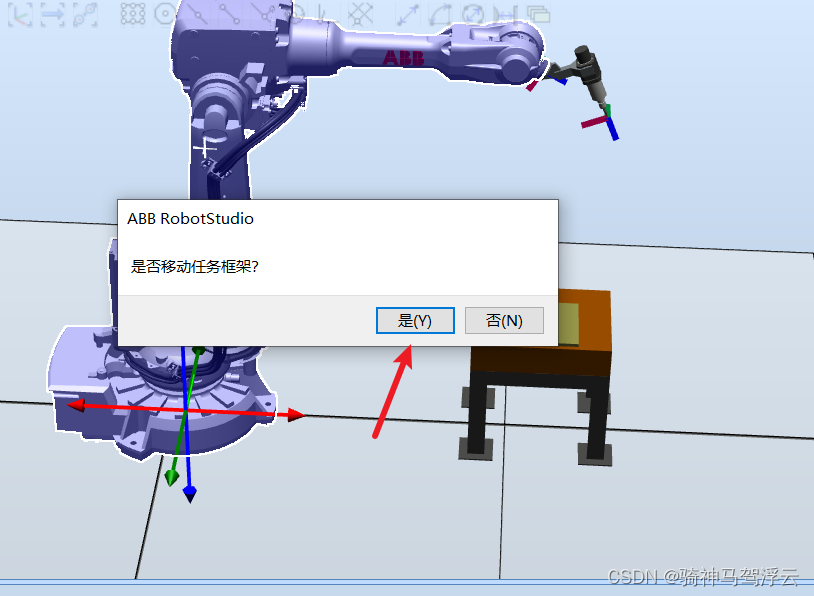
按照顺序依次操作
点击“是”
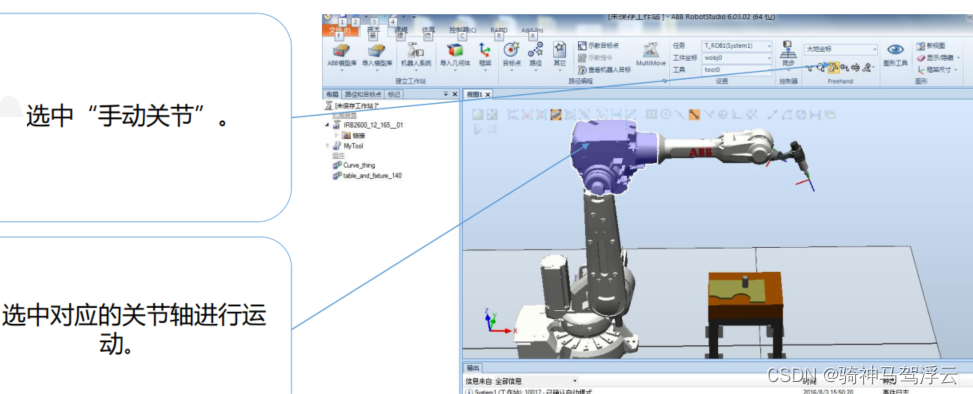
五、手动关节
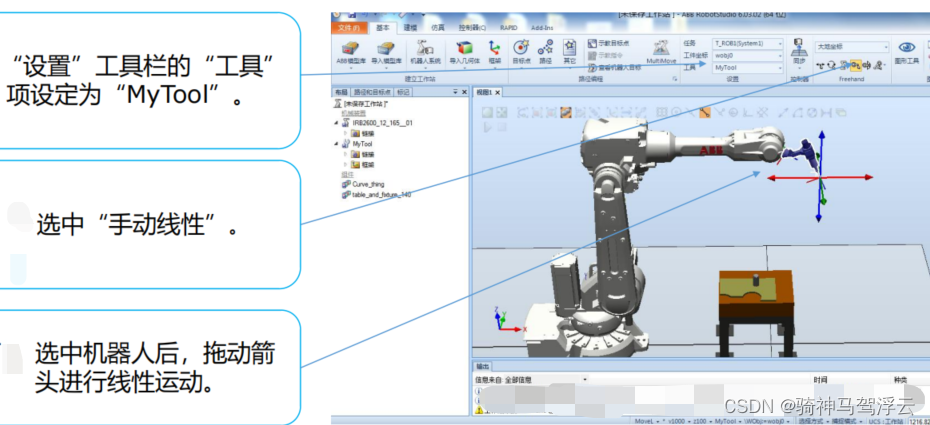
六、手动线性
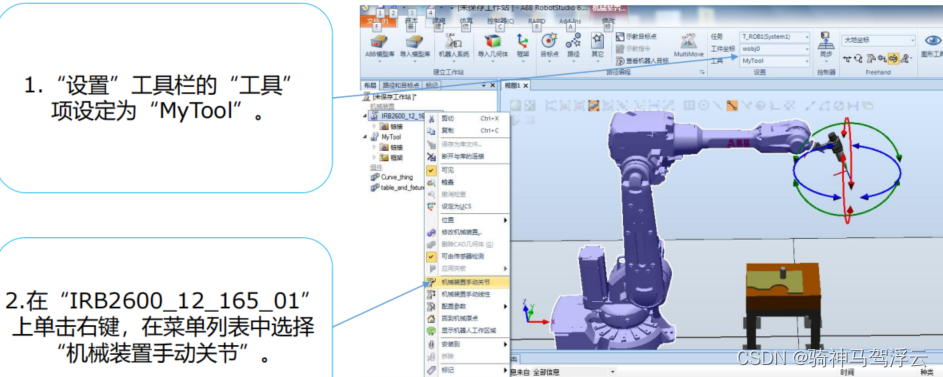
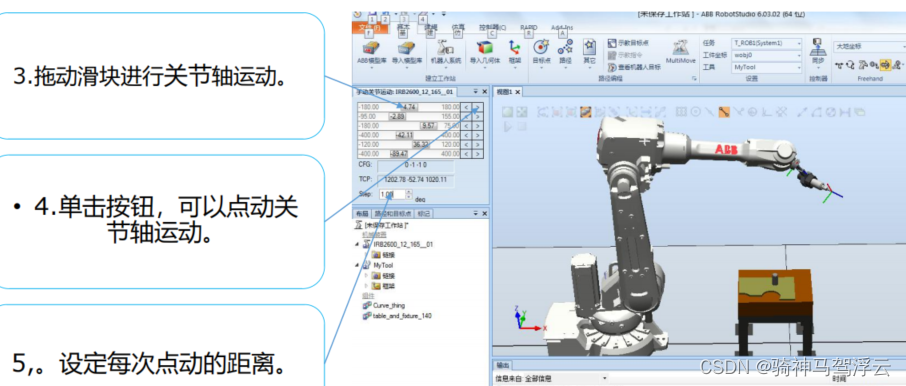
七、机械装置手动关节
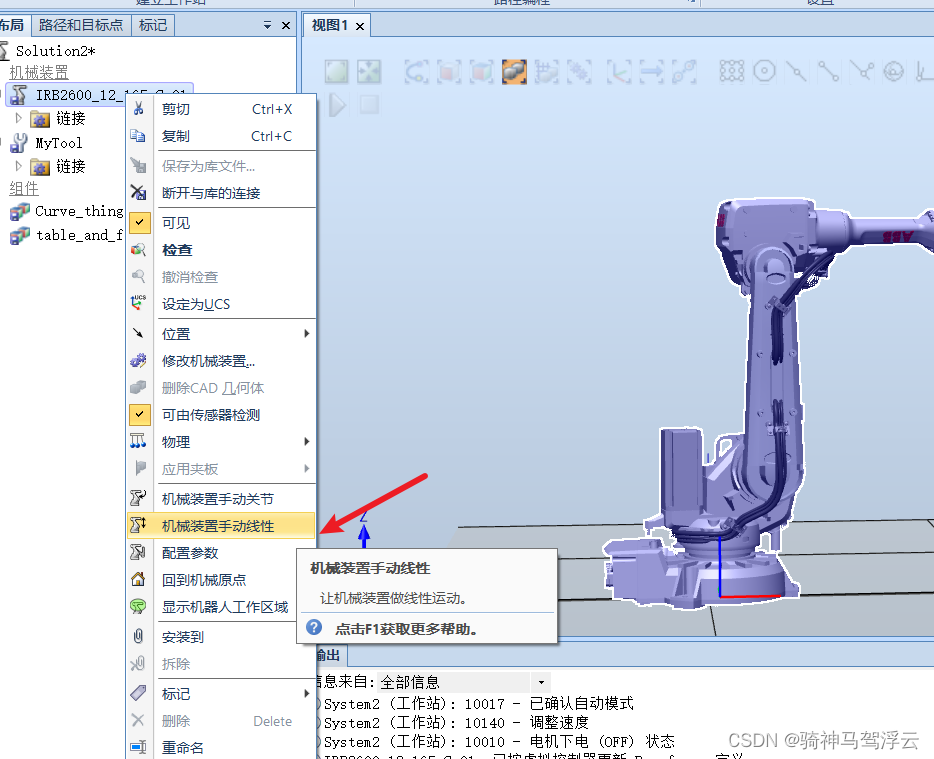
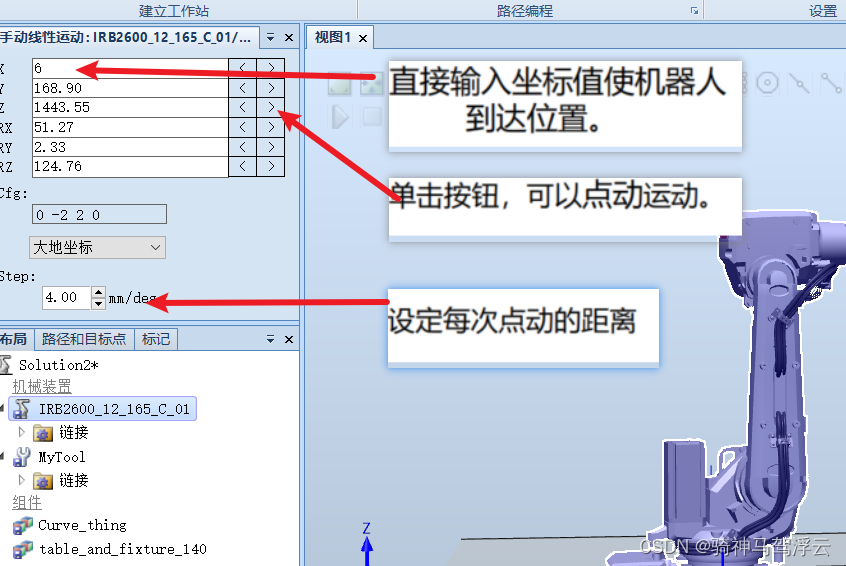
八:机械装置手动线性
在 “IRB2600_12_165_01” 上单击右键,在菜单列表中 选择“机械装置手动线性”
重定位运动重定位运动
一、在“基本”功能选项卡下, 单击“机器人系统”的 “从布局……”。
二、设置好系统名与保存位置后,“无脑”下一步直至完成
三、系统建立完成后,右下角“控制器状态”应为绿色。
四、移动机器人
按照顺序依次操作
点击“是”
五、手动关节
六、手动线性
七、机械装置手动关节
八:机械装置手动线性
重定位运动重定位运动
 6445
6445

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言






























