






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
先看上一章【自行车模型】
有了上一篇【自行车模型】的基础,这章咱们进一步,来看【四轮车模型】。
先看我复制过来的图:
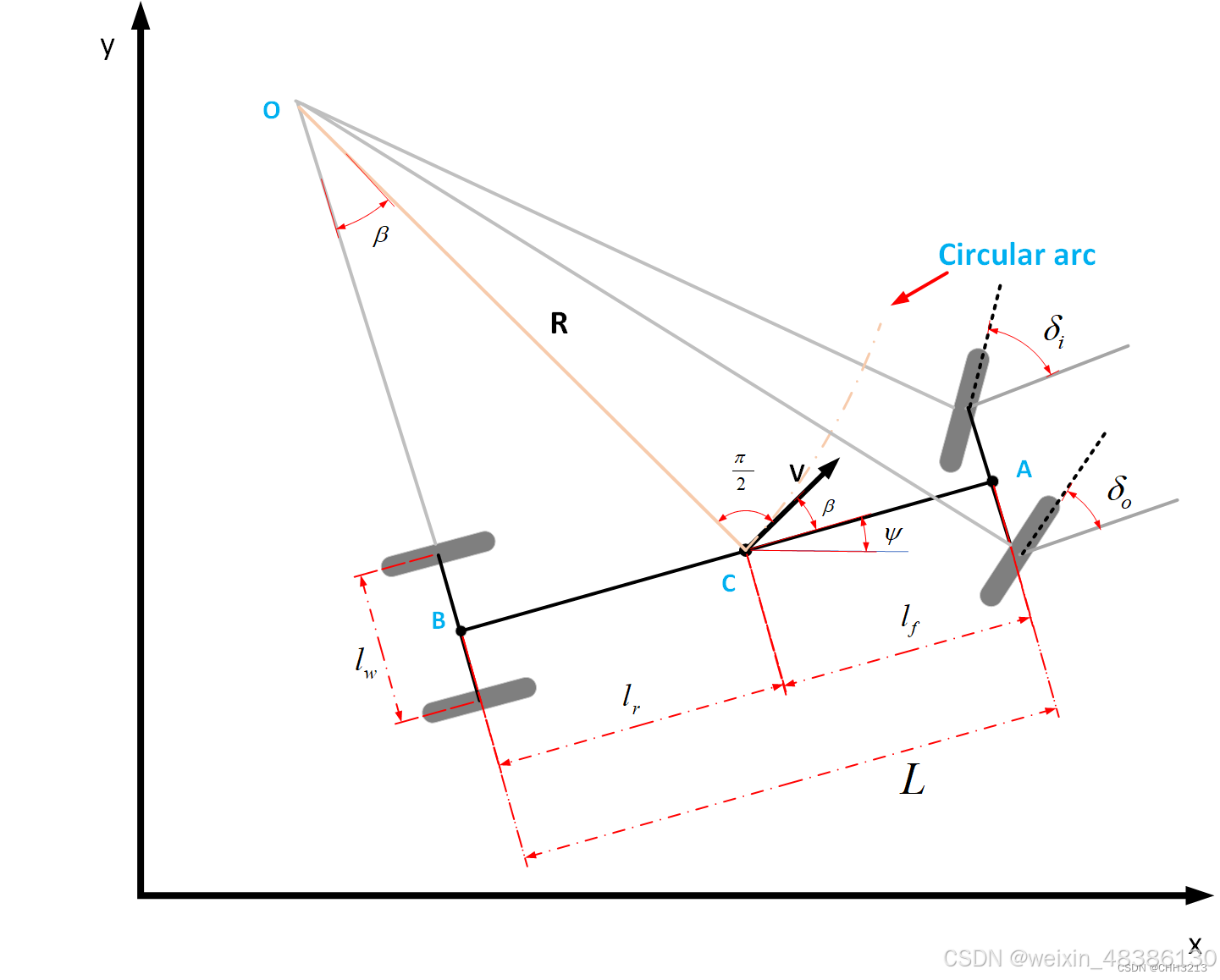
图片来源:https://blog.csdn.net/weixin_42301220/article/details/124747072
我们还是从输入输出等出发,结合上一章推导出来的公式,进行这部分推导。
上面这个图你现在看也看不出来啥,跟着我往下走,公式里面的字母再来看这个图对应。
``
一、【输入】【输出】【已知量】?
和上一章一样:
1.汽车速度:V;
2.前内轮与车辆夹角:δi;
3.前外轮与车辆夹角:δo;
【已知量】有三个:
1.前车轮与车辆中心的距离:Lf;
2.后车轮与车辆中心的距离:Lr;
3.前轮两个轮子的轮距:Lw;
【输出】也有三个:
1.汽车在全局坐标系下【X方向速度】:Vx;
2.汽车在全局坐标系下【Y方向速度】:Vy;
3.汽车【角速度】:ω;
你一定会看到,没有后轮的夹角了,替代的是前轮变成了两个轮子的分别夹角。(你要是没看到,证明你光看了没进脑子,我也经常出现,所以才开始写这些内容。)
这是因为汽车后轮是固定的没有转向角。(比亚迪的仰望后轮也是固定的哈,用的差速。)
明确输入和输出了,接下来就随着我开始推导。
再次强调一遍:
你的目标,用【输入】表达【输出】。
除了两个【已知量】之外,不能再有别的字母。
面试要问你推导过程,你就先画图,再把输入输出写下来,再推导。
接下来看推导。
##一定时刻要记得【输入】【输出】和【已知量】。
二、推导步骤
1.先复习上一章的公式,并开始简化
代码如下(示例):
Vx=V*cos(β+Ψ);
Vy=V*sin(β+Ψ);
ω=V/R;
其中:
Ψ的微分ψ=ω;
R = (Lf + Lr) / cos(β)*[tan(δf) - tan(δr)] (10)
β = arctan{ [tan(δf) * Lr+ tan(δr)* Lf]/(Lf+Lr)} (13)
【四轮车模型】是以【自行车模型】为基础的,所以
先不着急整【四轮车模型】,咱们先简化根据条件继续简化上面的式子。
2.开始简化
看上面的公式里,δf是前轮,δr是后轮,四轮车模型中的后轮夹角为0.
则R和β可以简化:
R = (Lf + Lr) / cos(β)*tan(δf)] (10)
β = arctan{ [tan(δf) * Lr]/(Lf+Lr)} (13)
然后咱们继续简化,
这时【神奇】的就来了,β直接等于0,这你敢相信?
其他资料里给出的理由,是由于轴距(前后轮距离)远远小于车辆转弯半径R,然后就β=0了。
咱们看一下自行车模型的图:
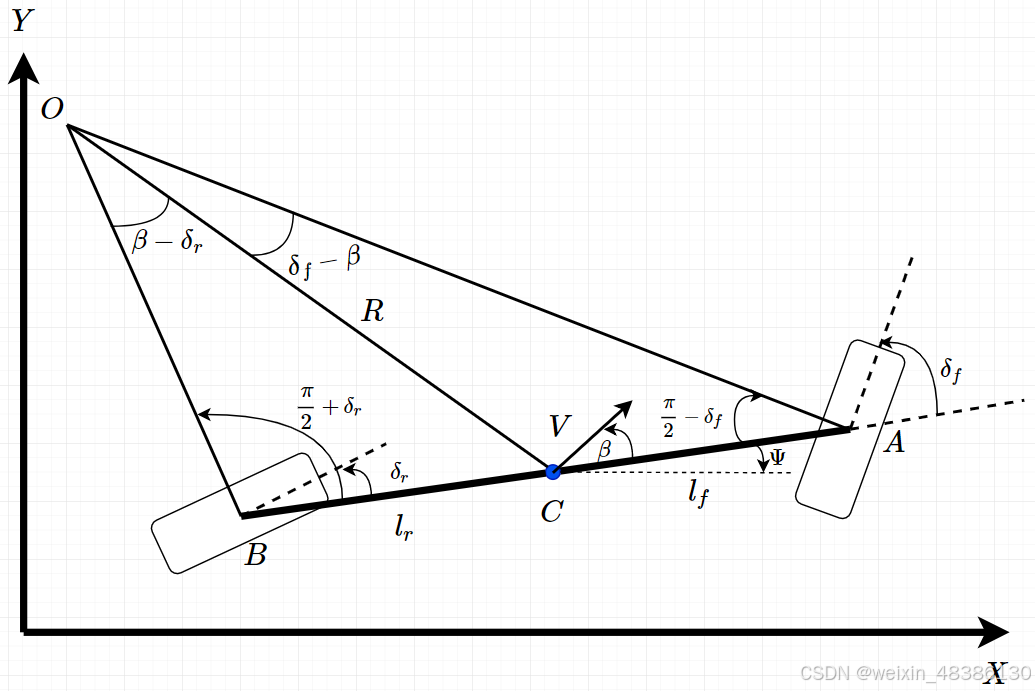
图片来源:https://blog.csdn.net/liumengxie/article/details/129899469
首先是后轮无夹角,然后把R变长,车身变短,Lr也跟着变短,是不是R快和后轮垂直的线重叠了,β是不是接近于0了。
反正我就是这么说服自己的。
就这么简化了。
R = (Lf + Lr) / tan(δf) (10)
β = 0 (13)
然后又【神奇】的来了,因为δf很小,所以:
tan(δf) ≈ δf
卧槽,凭啥δf很小呀,汽车转向就不能大一点?
这个我就没法解释了,只能把它当作简化的过程了,兄弟们要是能解释清楚的说一下。
然后上面的式子就变成了:
R = (Lf + Lr) / δf (10)
β = 0 (13)
这里要记住,δf的前轮转向角,是等效【自行车模型】后的结果。
咱们是【四轮车模型】,前轮转向角有两个:
2.前内轮与车辆夹角:δi;
3.前外轮与车辆夹角:δo;
你可别问我为啥前轮两个轮子角度不一样,自己去看一下阿克曼转向的知识。
然后,咱们就需要用δf和【已知量】把前轮两个轮子的角度表示出来:
错!
是根据
R = (Lf + Lr) / δf 得到
δf =(Lf + Lr)/R
然后直接不过脑子的替换:
δi =(Lf + Lr)/(R+Lw/2)
δo =(Lf + Lr)/(R-Lw/2)
这又是凭啥呀。
其实是相当于把前内轮和前外轮,和对应的后轮连接,然后各自做了一套【自行车模型】,然后再推导过来的。
怎么,你以为δf直接是前面两个轮子角度的和的一半?再复习以下阿克曼转向去吧。
然后这个时候才有了前轮平均转向角:
δ=(δi+δo)/2=
(这个公式我不知道怎么打)
然后里面的Lw比R小很多,然后公式就能简化:
δ=(δi+δo)/2=(Lf + Lr)/R
咱们再返回来看【自行车模型】的公式:
Vx=Vcos(β+Ψ);
Vy=Vsin(β+Ψ);
ω=V/R;
其中:
Ψ的微分ψ=ω;
R = (Lf + Lr) / cos(β)[tan(δf) - tan(δr)] (10)
β = arctan{ [tan(δf) * Lr+ tan(δr) Lf]/(Lf+Lr)} (13)
把咱们上面简化的结果给代进去:
Vx=Vcos(Ψ);
Vy=Vsin(Ψ);
ω=V/R;
其中:
Ψ的微分ψ=ω;
R = (Lf + Lr) / tan(δf)
β = 0
其中 δf使用平均转向代替:
δf=δ=(δi+δo)/2
这里需要注意的是,虽然上面推导过程中为了简化为下一步,其中有tan(δf) =δf这些简化,但是在最后的公式中,可以保留,减小误差
里面有些地方我也觉得不合理,等之后了解清楚了我再回来解释。
注意:其中有很多做了近似的运算,会不断造成误差,主要是方便最后的简化计算,实际编程过程中可以不近似,让计算机自己算。
总结
【四轮车模型】是完全根据【自行车模型】推导出来的,所以也只能用于低速。


















 5342
5342

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











