






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
这里光讲控制算法,下一篇文章再讲在自动驾驶中的运用
好久不见,之前讲了车辆运动学和动力学模型,让我们对需要控制的车辆有了数学模型,今天我们讲一下几种在自动驾驶领域常见的控制算法,为下一步我们控制汽车进行准备。
本次主要讲的控制算法有四种,分别是PID,LQR,MPC和NMPC
其中NMPC是我研究生课题做过一部分,但好像实际中没什么人用。
其他三种都很常见,是在自动驾驶领域还有别的机器人领域常见的基础控制算法。
里面没有代码,想复制的先不用进来,等我之后有空了写了给贴进来。
一、输入输出
在讲控制算法之前,我们还是先从【输入】【输出】开始讲
控制算法中,输入的叫【期望值】也就是你希望它是怎么一个值,输出是【实际值】
这里给大家举个例子,就像你骑自行车,你希望能一直压着白线走,但实际上歪歪扭扭,这就是你的输入输出。
而控制算法,就是为了让【实际值】能尽可能地逼近【期望值】
那为什么【输入】和【输出】不相等呢?
因为有【误差】,带来【误差】的原因是多种多样的,比如执行器精度不够,就是你给他输入了1m,它实际走了0.999m;还有像是延迟等。
而所有的控制算法,就是为了消除这个误差而整的。
到这里肯定有人已经迷糊了。
为什么刚输入就会有个输出来做误差呢?
我来给大家解释一下,比如汽车准备开始走了,你有个预期的速度是30km/h,你先踩一脚油门,这是因为汽车一开始还没有动,所以速度距离你的【期望值】的【误差】就是30km/h,然后因为有了速度,【误差】变为20km/h,你就踩了第二次油门,到第五次的时候,你准备踩油门,却发现此时速度已经是29.9km/h了,于是你就小踩一下,但是没想到速度变成30.1km/h了,此时你就需要松开油门。前面这一系列的操作,就是你在根据你的【期望值】去调整【实际值】,要是新司机呢,就容易风琴脚,也就是油门一深一浅,老司机就能一步到位,很平顺,并且不会出现超调,让人坐着很舒服。这个反应到控制系统上,就是老司机控制的比新司机好。
大家带着这个思想,我们进行以下的控制算法讲解。
一、PID
先讲大家最熟悉的,也是在各个控制系统中最常用的,几乎所有的机器人控制和车辆控制都离不了它。
先看图,最基础的PID控制算法:
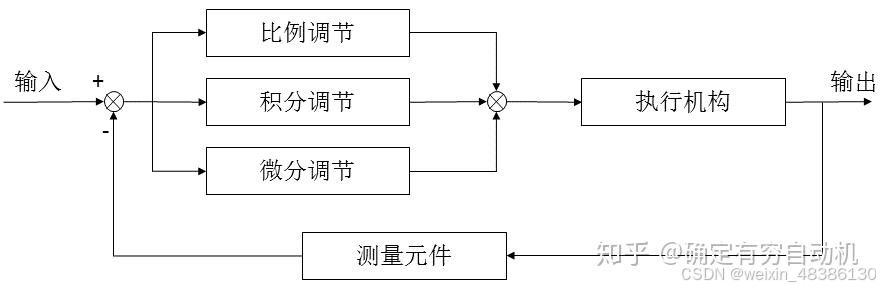
图片来源:https://zhuanlan.zhihu.com/p/39573490
如图所示:
PID是比例,积分,微分系统,三个字母就是代表这三个。
也就是说PID就是这三个系统的耦合系统。
听不懂正常,这纯理论,没法过脑子,记着就行。
接下来看我的解释。
咱们先继续看图,你看他们比例,积分,微分系统是并列,就是【误差】要分别经过这三个系统,然后再加起来。
给出PID系统的数学模型:

图片来源:https://zhuanlan.zhihu.com/p/39573490
其中U(t)就是PID控制系统的输出,用这个输出来控制之后的执行器。
err(t)就是【期望值】和【实际值】的误差,然后等式里面kp就是比例控制器,括号里面的第二项就是积分控制器,第三项就是微分控制器。
有人会问:比例控制器不是并列的吗,为什么现在在最外面了?
也可以放进里面。
然后我们分别讲【比例】【积分】【微分】的作用。
1.比例
比例很好理解,把误差乘以个系数,到时候误差要是嫌大了就乘个小的系数,误差要是嫌小了就乘个大的系数。(根据最上面的油门控制车速,理解为什么对误差的要求不一样。)
很明显,这个控制是纯线性的。
比例控制的特性:
比例系数小,那就相应的慢,比例系数大,控制的快但是震荡大。
到这里就又需要解释一下这句话了:
还是用踩油门控制车速的例子,你想到快点到30km/h,是不是得用力踩油门,是加速很快,但是很容易踩过去,然后你就得赶紧松开,或者还得踩点刹车,你要是踩刹车也很大力度的话,就又小了,然后你就一会油门一会刹车,速度就来回的飘。这个放在系统中就是震荡大。
但你要是慢慢踩油门,是稳定并且好控制,但等你快到家了,速度还没加起来,几公里的路程你开了一个小时。这个放在系统中就是响应慢。
那又想反应快,又不想有震荡怎么办?
那就需要我们的【微分】系统出场
(虽然PID,但是我们讲完P先讲D)
2.微分
微分系统的作用就是为了抑制震荡。
我们先给出微分系统的模型:
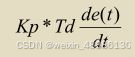
图片来源:https://blog.csdn.net/weixin_44562404/article/details/107718808
大家看等式右边,Kp就是上面的比例系数,Td是微分时间常数。
其实最让大家疑惑的是后面那个微分公式。
后面那个微分其实是【先前一段时间内的偏差变化率】。
前面的偏差变化率太大,就调整Td参数变小,要是变化率太小,就给个大的Td参数。
很多人到这里就看出来了,微分调节是一个根据旧数据的提前调节。
Td越大,则抑制震荡的能力越强。
到这里肯定有人问了,Td越大不是偏差【变化率】越大吗,怎么反而抑制震荡的能力越强了?
这个我复制一下别的博客里的话来解释一下,或者你只需要列几个速度值自己看一下也可以:
现在让当前的速度值为90,目标值为100,Bias=10。现在是为了接近目标值,所以D项的结果是增加PWM。现在增加后的速度变成了105,Bias=-5,Last_Bias=10,Bias-Last_Bias=-15,如果增加后的速度为110,Bias=-10,Last_Bias=10,Bias-Last_Bias=-20,D项的计算结果是为了减小PWM,快速抑制住PWM的过量增加,超过目标值越多,那么抑制能力越厉害。
原文链接:https://blog.csdn.net/a2001444/article/details/118053894
从这里就理解,积分变化Kp是直接调节【偏差】的大小,会产生震荡;而微分系统的参数Td则是调节【偏差】变化率的大小,可以抑制震荡。
但是光用【比例】和【微分】调节就会出现一种情况:【期望值】和【实际值】还有【偏差】,但是【偏差】太小。【偏差】小,那【比例系统】就会减小比例系数,就像快到目标速度了就得放缓油门;但是此时震荡也很小,【偏差】变化率为0,那【微分系统】就也不会工作。
这种情况,就会越临近【目标值】,变化的越慢,会在很长时间内达不到【目标值】。
于是,需要解决【目标值】和【实际值】的偏差,也就是【静态偏差】,所以就有了积分。
3.积分
先给出模型:
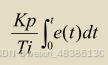
图片来源:https://blog.csdn.net/weixin_44562404/article/details/107718808
看公式里面的,Kp还是比例系数,Ti是积分常数,后面是对之前时间的偏差进行积分。
积分系统的作用是消除静态偏差。
然后我来解释这部分的积分信息:
首先是积分常数Ti,它越大,1/Ti越小,1/Ti越小,积分控制器的作用越小,消除静态偏差的时间就越长,相应就越慢。
PID结束
通过上面,大家会看出,比例P是基础,I和D是调节,所以就存在PI和PD控制器,各有缺点。
PID控制器的调节参数就是指调整【比例系数】Kp,【积分系数】Ti和【微分系数】Td。
根据这三部分的各种性质会产生很多优化方案,之后我再进行补充。
二、LQR
先说一下,LQR一定要一次性全看完,搞懂,至少留两个小时的空余时间来看以下这部分,否则就先看后面的MPC和NMPC。
这是我认为最难理解的基础算法,但为啥难理解,我最后会解释。
上面PID说完了,我们来说另外一种常用的算法——LQR。
LQR相对于PID理解起来就难很多了。
但是万变不离其宗,所有控制算法的目的都是一样的,都是要又好又快地减小【偏差】。这个在这片文章的最上面有写,大家一定要记住。
然后带着这个思想,让我们来看一下LQR控制器是如何又快又好地减小【偏差】的。
LQR是状态反馈控制,这个大家在很多博客中都看到过。但是大概率看不太懂,我们在此做出解释。
像是PID,如果要控制【速度】,那输入输出就都是速度,然后放进PID算法中进行运算,并且是单输入单输出;如果要是想同时控制【转向】,那就需要再起一套PID,然后把角度的【期望值】【实际值】放进去进行计算。
但是LQR不同,【输入】【输出】没法提前解释,只能大家随着我下面写的来看。所以大家一定要一次性全看完,否则很难理解。
算法介绍
先看一眼算法框图:
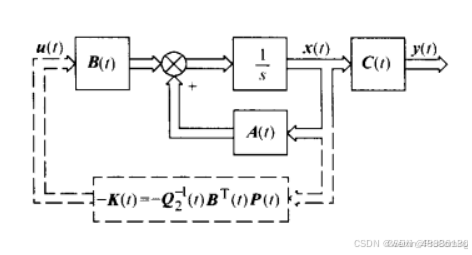
图片来源:https://blog.csdn.net/ProComing/article/details/140405262
图片来源:https://zhuanlan.zhihu.com/p/363033191
肯定看不懂哈,继续和我往下走。
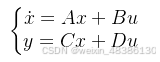
再看一眼LQR模型公式:
图片来源:https://blog.csdn.net/weixin_43487974/article/details/127195643
到这里也还是肯定看不懂哈,不着急。
我们先看两个公式,第一个公式叫状态方程,第二个公式叫输出方程,其中y就是最后系统的输出,但是这个【系统输出】大家不要以为就是我们想得到的东西,我们先继续往后看。
我们再继续看输出公式中的内容,大写的都是系数矩阵,这个等会说。
小写字母有两个,其中x是系统的状态向量,u是系统的控制输入。
到这里也完全看不懂也非常正常,不要着急,我来用实际案例继续解释。
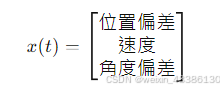
假设我们有一辆自动驾驶汽车,需要通过控制【加速度】和【方向盘角度】来保持在【道路的中央】并以【恒定速度】行驶。
那这里面的【状态向量】x是什么呢?
是车辆目前的状态,这个状态需要与我们的【预期目标】:【道路的中央】和【恒定速度】相关,有很多种答案,这个需要自己根据实际情况去选择,我们选择其中一种:
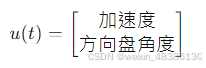
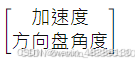
那【控制输入】u是什么呢?
就是我题目种想控制的量:【加速度】和【方向盘角度】
那输出方程的y在这个例子中指什么呢?
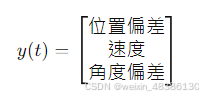
是不是很意外,对,这个例子中输出和状态是一样的。
到这里就很迷糊了,那状态都已经是输出了,为啥要写这个这么费劲?
少年,你还记得反馈吗,还记得PID输出绕回来作为反馈吗。
这个是一个道理。
到这里就有人问了,那【状态反馈】就是【输出反馈】吗?
也不一样,我来给你解释:
这个例子里是【输出】刚好等于【状态】,这是为了大家方便理解【状态反馈】,但实际上,【状态】要比输出要多,就像这个例子中的状态,它还可能有【变速器温度】【油箱油量】等等,说白了,【状态】是当前传感器接收到的量,有时候和【输出】一样,有时候能包含【输出】,有时候就和输出没关系,我用这个例子完全是为了方便讲解和让大家理解【输出反馈】。
到了这里是不是就有些理解了,如果还是不能太理解,那肯定是我说的不清楚,之后我再补充或者修改。
我们到此就将第二个输出方程的三个变量给说完了,还有两个大写字母:
C是输出矩阵,描述状态变量和输出之间的关系;
D 是直接传递矩阵,描述控制输入和输出之间的关系。
这两个没什么可解释的,就是叫这个名字,需要说的是它俩怎么得到和计算。
但是这部分我们先稍微等一下再说。
我们先说第一个状态方程,还是有三个小写字母和两个大写字母。
x已经讲过了,就是【状态向量】。
等式左边带点的x,就是x的时间导数,也就是【状态向量】的变化率。
u也说过了,就是【控制输入】
A是状态矩阵,描述状态变量之间的演化关系;
B是输入矩阵,描述控制输入对状态变量的影响;
大写字母就记住是啥就行。
这个时候大家应该会有个大概的印象了,并且肯定有很多疑问,我们挨个解释:
1.我们要的不就是【加速度】和【方向盘角度】吗,怎么当输入了?
这个就需要解释一下,
是【控制输入】,不是像PID中我们给的【输入】,虽然名字里带【输入】,但这个是抽象的系统的【控制输入】,实际上就是我们这个系统最后要的东西。
为啥非要叫这个名字我也不清楚,在我弄懂之前,因为【控制输入】这个名字,让我对LQR一直理解不了。
那LQR【输出】又是什么呢,这个【输出】不是我们要的输出,它是用来和我们的【期望目标】做对比的,也就是我们心中最终的目标:保持在【道路的中央】并以【恒定速度】行驶。
我们把和【道路中央】的坐标还有【恒定速度】的速度做对比,来衡量我们这个系统好坏,怎么评价好坏呢,要是不好的话调整哪个参数呢?
要调整哪个参数呢?
可不是ABCD,这四个字母是系统模型,也就是几个【状态】【系统输入】和【输出】的关系,这个咱们最后再解释。
要调整的参数我们需要看:
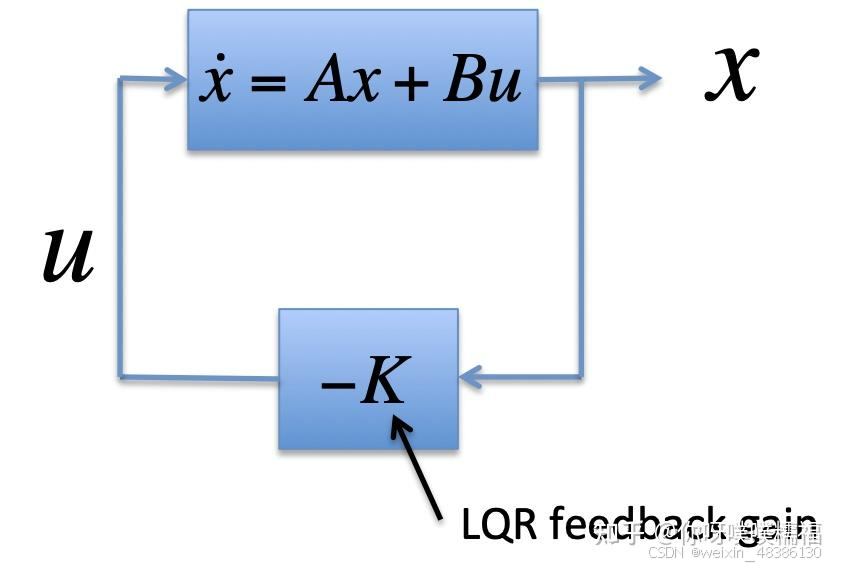
这张图,在我们最上面放着,还一直没讲,大家看一下,上面哪个公式就是咱们的状态方程,但是下面还有一个-K,然后【状态】和这个-K乘了一下,作为【系统输入】给反馈上去了。
这里是不是又懵了,要理解这个图,咱们先完全不考虑刚才讲了半天的输出方程。
咱们把这个就当作一个完整的系统。
输入经过 这个方程,然后变成输出x,输出x再反馈回来,并乘-K作为输入。这个是不是能有些许的理解。
这个方程,然后变成输出x,输出x再反馈回来,并乘-K作为输入。这个是不是能有些许的理解。
那就有个关系:
u=-Kx
再返回咱们那个例子中,就是:
 =-K
=-K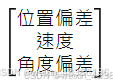
(有点难看将就一下哈)
这个K就叫控制器增益矩阵。
叫什么不重要,知道它是什么最重要。
到这里,我们还是不知道评估好坏的方法,也不知道这个怎么优化。
有意思的来了,先看下面这个:
这他妈又是啥!
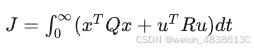
这叫成本函数或者性能指标。
叫什么不重要,重要的是干什么用的。
它!就是咱们评价整个系统好不好的指标!也就是咱们讲了半天,一直没出现的,整个系统的目标。
其中:
Q是对【状态向量】x的加权矩阵,表示我们对不同状态的重视程度;
R是对【控制输入】u的加权矩阵,表示我们对控制输入的成本的重视程度。
对这个理解,一定要结合我们例子里的:
=-K*
通过调整Q和R的值,我们可以平衡系统的状态和控制输入之间的权衡。当我们想要更加重视状态时,增加相应状态的Q值;当我们想要更加节约控制能量时,增加相应控制输入的R值。

叫【状态偏差成本】。
 叫【控制输入成本】。
叫【控制输入成本】。
我们结合上面的例子来说明一下:
状态偏差成本:假设你想让自动驾驶汽车保持在车道中心并保持恒定速度。如果汽车偏离车道或速度与期望值有较大差距,LQR会将其视为较大的状态偏差,这会导致较高的状态成本。
控制输入成本:如果你希望汽车回到车道中心,可以通过转动方向盘和加速/减速来实现,但如果你频繁地剧烈调整方向盘或加速器,会增加控制输入的成本。因此,LQR不仅会尽量减小状态偏差,还会尽量减少控制输入的幅度或频率。
整个LQR系统的目标,在此时呼之欲出:找到一个最优的控制器增益矩阵K,使得成本函数J最小化。
到这里又不理解了,K和成本函数J有鸡毛关系啊。
我来解释一下:
我们的目标就是为了让成本函数J尽可能小,你们看公式中,成本函数是前后两个的和,让成本函数尽可能小,也就是让前后【状态偏差成本】和【控制输入成本】都尽可能小,这就是一个【最小二乘优化问题】。
为什么【成本函数】是要让【状态偏差成本】和【控制输入成本】尽可能小呢,这里解释一下:
尽量减小状态偏差:让系统的状态𝑥(𝑡)尽可能接近目标状态(通常是零状态)。
尽量减少控制输入的代价:让控制输入𝑢(𝑡) 尽可能小,以避免过度操控。
我还没解释K和J的关系哈,不着急,我下面说:
K 控制了如何根据当前的系统状态𝑥(𝑡) 生成最优的控制输入𝑢(t)。
K 是在给定Q 和 R 的前提下,通过LQR算法来计算的。
Q和R这个权重不是系统给的,是你给定义的,得看你对不同【状态】和【控制输入】的重视程度。
然后【状态】是根据传感器得到的,根据【状态】*K就能得到【系统输入】,然后在带进【成本函数】J中,就是一个只有一个变量K的最小二乘问题。
【状态】是传感器得到的!不用你算!
到了这里,我们终于终于把这个LQR给讲完了。
为啥你之前一直不懂LQR,是因为它【系统输入】不是咱们理解的输入,是咱们想要得到的东西,这个太具有困惑性了,所以很多人一开始就不知道【输入】和【输出】是啥,查半天也理解不了。
再返回头去看输入方程,它可以没有,可以直接用【状态】衡量。
前面如果有不通的不顺的,前后感觉理解不了的,不要怀疑是自己的理解,一定是我写的不清楚,我之后再返回头来改改。
要是你能看懂并且理解,那你是真厉害了。
三、MPC
如果你从LQR而来,那你终于能喘口气,让我们理解一下比较好理解的MPC。
MPC叫模型预测控制。叫什么不重要。
它用来干啥的,是通过模型来预测系统在某一未来时间段内的表现来进行优化控制。常用来做无人驾驶中的路径跟踪。
看不懂,没关系,纯理论肯定看不懂。
我们还是根据【输入】和【输出】来看,如果你能理解了上面的LQR,那你这部分会比较好理解,如果还没看上面的LQR,那就随着我往下看。
我们首先来看一下MPC的模型公式(状态方程):

图片来源:https://blog.csdn.net/w_w_y/article/details/123917212
跟着这个方程,我们还是从【输入】【输出】开始讲。
等式左边x(k+1)就是系统的【输出】
等式右边u(k)就是当前系统的【输入】
等式右边x(k)是当前的【状态量】
还是看不懂也没关系,先举个简单点的例子:
让汽车在5秒内从静止状态加速到60公里/小时,并保持匀速行驶。
要用MPC实现以上的内容,此时:
【输出】x(k+1)就是车辆下一时刻的速度;
【输入】u(k)就是我们给车辆的加速度;
【状态量】x(k)就是当前车辆的速度;
根据速度和加速度的关系,有:
x(k+1)=x(k)+u(k)*t
以上这个式子就是【预测模型】
你这个时候想一下自己想得到什么呢?
没错,是系统的【输入】,也就是给车辆的加速度,就是自己踩的油门大小,这是自己能控制的量。
当前的【状态】也就是车辆当前的速度用传感器获取。
【输出】也就是下一时刻的速度还没算出来,也是未知的,所以目前这个式子求不出来。
那让我们继续往下讲。
把上面式子的【输出】作为预测到的【状态量】,再计算下下一时刻:
x(k+2)=Ax(k+1)+Bu(k+1)
然后以此类推,往下列式子,可以列30个,也可以列50个。
不停往下类推列式子,就叫【滚动预测】。
这30个或者50个式子,就是30或50步。如果一个控制周期是3s,那对应的【步长】就是0.1s或者50/3s。
那咱们列出了这么多式子,还是没法求啊。
这个时候就需要回到我们的题目,【目标】是60km/h,假设你打算在这一个控制周期就实现,那最后的x(k+30)就是60km/h。
以此往前推。
为什么有这么要列这么多式子呢,一步实现不久行了吗?
因为我们的加速度不可能那么大,这也就引入了MPC的另外一个要素:【约束】。
放在我们这个例子里就是加速度的最大值。
这个例子比较简单,但是你先不要在脑子里直接求解哈,先跟着我继续走,理解MPC。
到这里,还是算不出我们要的【输入】也就是控制量加速度。
因为没有一个【评估】。
让我们再返回头去看条件,我们的目标只有一个,就是达到【目标速度】,每个时刻的【目标】都是它。
那每个时刻的【输出偏差】就有了,也就是x(k+1)-60km/h
我们预测了30步,也就有30个【输出偏差】,让这些【输出偏差】的和最小,就是我们的【优化】。
求解这个【优化问题】,就会得到最优【控制量】,也就是我们的【输入】加速度。
这个例子中的优化函数:
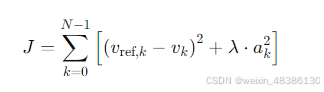
N:预测步数,也就是我们定的30步或者50步。
v:速度
a:加速度
λ:加速度权重。正则化系数,用于权衡控制输入(加速度)和跟踪误差之间的平衡。
整个优化目标就是让这个方程在【约束】下值最小。
而以上这一步就叫做【滚动优化】。
得到了这么多加速度,我们仅使用下一时刻的加速度,也就是a(k)。
然后在下一时刻到临时,再进行同样的步骤,用下一时刻的【状态量】进行反馈优化,再指导下下步的动作。
这个就叫做【反馈矫正】。
于是MPC的三大要素【预测模型】【滚动优化】【反馈矫正】就解释结束。
如果有不清楚的我再回头进行修改。因为写到MPC的时候我已经有些疲倦了。
四、NMPC
NMPC比MPC多的这个N,指的是非线性,于是全程就叫做非线性模型预测控制。
这部分需要你先理解了MPC再来看,我会写的比较简单。
非线性主要体现在两方面:
【预测模型】的非线性和【优化函数】的非线性。
在MPC中我们讲了一个非常简单的例子,速度和加速度,是线性的,但在实际工况中,【预测模型】经常是非线性的,我们再讲个例子:
(这个例子还是蛮难的,大家慢慢看)
假设我们有一架四旋翼无人机,目标是在三维空间中跟踪一条给定的轨迹(如飞行沿着某条曲线)。无人机的动力学模型是非线性的,这使得它难以用线性控制器(如MPC控制)精确控制。我们使用NMPC来解决这个问题。
【预测模型】是非线性的:
无人机的状态包括:位置𝑝(𝑡)=[𝑥(𝑡),𝑦(𝑡),𝑧(𝑡)]p(t)=[x(t),y(t),z(t)]、速度𝑣(𝑡)=[𝑣𝑥(𝑡),𝑣𝑦(𝑡),𝑣𝑧(𝑡)]姿态角度(俯仰、偏航、滚转)和角速度。这些状态随时间演变的动力学模型为非线性关系,受力包括重力、推力、旋翼提供的控制力矩等。
状态方程可以简化为:
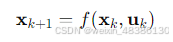
其中xk是无人机当前的状态,包括位置、速度和姿态。
uk是当前的控制输入,包括推力和舵机角度。
这个模型方程就需要根据无人机的实际模型获取了,在这里不多讲,因为我也不懂无人机。
【优化目标函数】也是非线性的:
我们的目标是让无人机的位置和目标轨迹尽可能接近,于是【优化目标函数】:

其中:
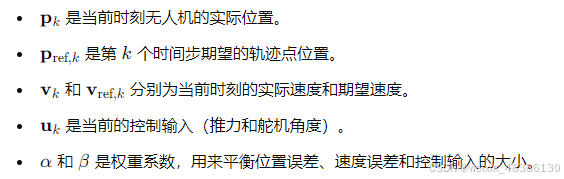
需要有各种约束,比如无人机的舵机最大角度,无人机的最大动力等等。
然后就是需要在这些【约束】下,让这个【优化目标函数】最小,而求出我们所需要的下一时刻的【控制量】。
NMPC就讲这些,其他的就和MPC一样了。
总结
PID,LQR,MPC这三种是无人驾驶和机器人控制领域的最常见的三种算法,NMPC算是MPC的变形和扩展。
要是看不太懂,肯定是我写的不太清楚,我之后再回来补充修改。


















 229
229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











