






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
文章目录
前言
找工作不容易,啥都得看看,之前毕设做的激光slam,在这里整理一下
本文主要讲3d激光slam,先理解,再拆分,再讲一些基础知识,再讲几个经典算法。
一、slam是什么?
拼图!
slam就是拼图。
视觉slam就是连续拍几张照片拼在一起。
激光slam就是连续采集几帧点云图拼在一起。
你想一下,给你两张图片,一张图片拍到这张桌子三个角,另外一张照片拍到桌子两个角,你怎么把这两张照片拼在一块?
把都拍到的那个角给重叠,然后把两张照片中其他能对上的特征对上呗。
这里面,
“角”“其他特征”就是slam中的【特征提取】
“重叠”“对上”就是slam中的最核心的部分——【点云配准】
两张照片之间的距离和旋转角,就是slam中的【里程计】
把很多张图片给拼成一张大图,就是slam中的【建图】
照片比较多,图比较大的时候,难免会有误差,比如说一条直线拼的不直,那就需要一边拼图一边修正,这就是slam中的【回环检测】
所有的slam无非就是在这上面做文章,以下我们就以此进行详细解释。
二、激光slam具体步骤
1.点云预处理
激光slam中,采集数据的是激光雷达。
激光雷达有几对接收器和发射器。
其中发射器发射激光,接收器接收反射回来的激光,计算二者时差,然后计算出距离。
接收器和发射器都会安装在一个不断旋转的台子上面,然后进行快速的360°旋转。
如果只有一组接收器和发射器,就叫单线激光雷达,几组就是几线。
多线雷达就能采集3d数据。
所以你也看到了,其实采集回来的数据是几行,最多的128线就采集128行,不过18线和36线的其实就很够用了。
然后采集回来的数据是一个个点,每个点都是一组数据,数据中有这个点的三维坐标信息,还有线标,就是从上往下数,是第几组接收器发射器的采集的点。有的还有光强等。
采集回来的数据呢,点太多了,还有些不知道飞哪去的点,还有些接收器没接收到的点,于是就需要数据预处理。
1.去NAN点
方法就是调用pcl的函数,去除数据中的无效点
2.去噪
噪点的去除方法就是滤波,像是Kalman滤波算法、粒子滤波算法,半径滤波算法等,pcl库里基本都有。
4.去畸变
畸变这个是雷达点云数据中特有的一种现象。
原因就是因为在激光雷达采集数据是通过接收器发射器不断【旋转】采集来的。
一帧就是雷达旋转了一圈。
雷达旋转的过程中,车辆或者机器人也会走,这个时候相当于一帧的点云中,有不同时间和位置的采集来的数据,就会产生畸变:
去畸变的原理,就是知道采集这个点时的雷达,和最开始的位置的相对位姿,然后给转换过来。
相对位姿的获取用imu。
比如说,以雷达这一帧初始点作为坐标原点,其中一个点采集回来的坐标为(1,3),但实际上,imu判断雷达已经往y轴方向走了2,那这个点的真实坐标信息就是(1,5).
就是一个相对坐标系的转换。
5.下采样
雷达数据太多了,后面不好计算,就用下采样,也就是隔几个点取一个,让数据量小一点。
常用的下采样方法:
- 体素栅格滤波
- 随机采样
- 均匀采样
等等
反正pcl库里都有,调用就行,这些都可以了解一下。
6.坐标变换
主要就是局部坐标系变换到全局坐标系,这个还需要和后续的激光里程计配合。
主要包括旋转和平移。
就是把每一帧激光雷达的数据都转换到全局坐标系下面。
pcl库里也有。
这里补充一点知识,坐标变换中常常提到一个名词——四元数。
四元数的作用就是表达旋转。
这里是不是就有些疑惑,为啥非要整个四元数表述旋转,旋转不就是三个角度吗?
之前直接用三个角度表示旋转的叫欧拉角表示法。
实际运算过程肯定有个先后顺序对吧,xyz三个轴的旋转角。
假设使用欧拉角的旋转顺序是 ZYX。
如果y轴刚好旋转到90°的时候,z和x轴对齐重合了,两个旋转就成一样的效果了,那就缺失了一个角度的自由度了。
这个就叫欧拉角的万向锁。
四元数由一个实部和三个虚部组成,实部指的是旋转幅度,虚部指的是旋转方向和角度信息。
用虚部和实部就能计算出在哪个轴旋转了多少度。
四元数这部分可以搜的看一下。
2.特征提取
特征提取目的就是提取中当前帧和目标帧的特征。
一般可以分为三步:
1.计算曲率
2.提取边缘特征和平面特征
3.去除噪声和降采样
目前的3d激光slam的特征提取,很多都是根据loam系列来的,也就是根据曲率区分平面点和角点。
曲率大的就是角点,曲率小的就是平面点。
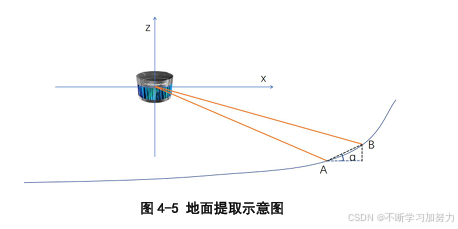
lego-loam系列中还加入了地面点和非地面点的区分,这个是判断位于同一垂线的两点夹角是否足够小。
曲率计算在pcl库中有。
slam中的特征提取和图像识别的特征提取有区别,没有图像识别中的特征提取那么复杂,主要目的是为了后续的点云配准做准备并减少计算量。
3.点云配准
点云配准是激光slam中最重要的部分,目的是为了获取两帧之间点云位姿变换矩阵。
主要算法有两种:ICP和NDT
1.ICP
ICP(Iterative Closest Point)是一种常用的点云配准算法,用于估计两个点云之间的刚性变换(旋转和平移),使得它们尽可能重合。
本质就是一个最小二乘优化问题。
可以分为两大步:
1.最近点匹配
2.最小二乘优化
1.最近点匹配
最近点匹配就是为了找到当前帧点云每一点,在目标点云中的对应点。
听起来很绕口对吧。
两帧点云之间假设有100个点,那我们需要把这100个点一一对应起来,然后再进行最小二乘优化求解,解出两帧点云之间的最小位姿变换矩阵。
那这些点怎么相互对应呢?
最简单的就是暴力搜索,直接计算每个点之间的距离,然后取最小的那个点。
更为普遍的是使用kd树搜索。
kd树是一种数据结构,有点像二叉树。将中位数点作为根节点,将其左右两部分递归划分为子树。
先将数据都存进kd树中,然后从根节点开始,计算距离,判断属于那边的子树。
大大节省了计算量。
还有一种是体素网格。
也是先将点云划分为固定大小的体素网格。
然后再在对应的网格中计算每个点的距离,进行最近点搜索
ps:这里需要注意的是,这里的计算最近点,就直接用的雷达局部坐标系中的点的距离,也就是采集得到的原始数据的距离。
pcl库中也都有
搜索这一步可以使用gpu加速等,毕竟这步搜索多个点可以并行计算,而不是需要遵守先后。
2.最小二乘优化
上一步找到对应点之后。
就需要构建最小二乘优化问题了。
就是将所有对应点之间的距离相加,然后通过优化解出最小位姿变换矩阵。
这里肯定会有疑问。
不是已经计算出每个点的最小距离了吗,怎么还要优化求解?
这里有很多地方没有专门提,所以会让很多人造成误解。
我来解释一下,前面的找最近点,就直接是在雷达局部坐标系下计算。
也就是说,直接用的雷达点云的点坐标来的,也不管雷达有没有移动。
但是这一步,本来就是为了求解两帧雷达之间的位姿变换的,所以这里,将当前帧的雷达坐标系,设为所需求解的未知量,也就是相对目标帧的平移和旋转。
然后再进行对应点求解。
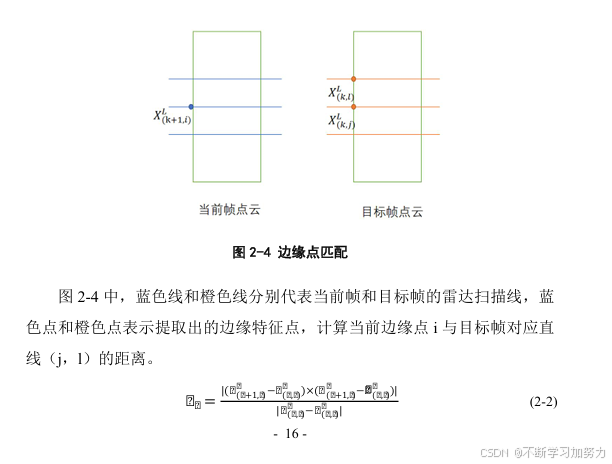
求解的过程中,就需要我们之前的特征提取了。
角点和角点进行距离计算:
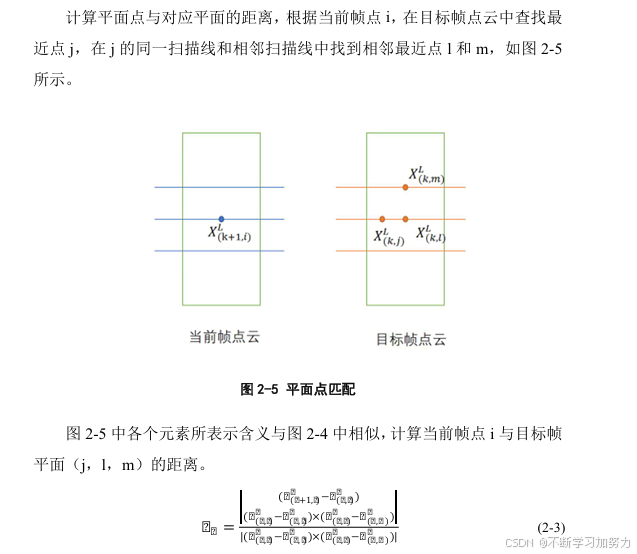
平面点和平面点匹配计算距离:
然后就是最小二乘优化问题求解,这部分太复杂了,之后我应该会单独写一篇文章讲。
2.NDT
4.里程计和建图
里程计就是上面计算出来的相对位姿的累加。
有相对位姿和初始帧坐标,就可以得到每一帧在全局坐标系的坐标,然后将所有点给保存在一个文件里,就是建图。
5.回环检测
回环检测是后端优化中的一部分。
后端优化也就是有了上面的里程计信息,可以进行初步建图后,为了防止建图有误差,再进行一步优化。
毕竟上面的里程计是优化问题,求得的解有可能没那么准,所以需要不断检测优化。
回环检测的主要目的是修正累积的定位误差,从而优化地图和轨迹,提升整体SLAM性能。
讲一下什么是回环检测:
在当前帧(比如第10帧)和之前的某些帧(比如第1帧)之间找到匹配关系,并通过配准计算它们之间的相对位姿。
之前里程计是一帧接着一帧进行icp或者ndt进行计算。
回环检测就是隔几帧进行计算,也是使用一样的配准算法。
有些情况,机器人还在往前走,第10帧和第1帧有部分重叠。
有些情况,机器人已经绕了一圈了,第10帧和第1帧几乎完全重叠。
这些计算出来的相对位姿,都是为了后续的后端优化做准备。
6.后端优化
loam和lego-loam都没后端优化
lio-sam有,使用了图优化,用的gtsam库。
后端优化这部分较之于前面很不好理解。
我们直接讲一下图优化。
图优化本质上还是最小二乘优化,只是构建优化函数和优化问题的时候用到了图的思想。
图就分为节点和边,都是抽象的概念。
反正记住,节点就是某一帧的【全局坐标信息】,边就是某一帧和另外一帧的【相对位置关系】。
图优化也是一帧一帧优化的,所以下面我们讲的是某一帧的图优化。
我们还是从输入输出开始讲吧。
输入
1.节点:特定时间的里程计位姿,回环检测得到的位姿,gps的全局数据。
再解释一下,节点就是每一帧的全局信息。
2.边:两个节点之间的约束:两个节点的相对位姿(点云配准得来的),imu得到的两个节点的相对位姿关系。
输出
图优化的输出主要是每一帧的优化后全局位姿,包括位置和方向。
优化函数
怎么根据输入的这些数据得到输出呢?
就需要建立一个优化函数。
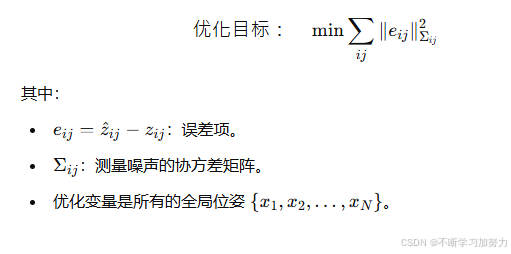
优化目标的核心是让估计值尽可能接近测量值。
测量值就是之前点云配准得到的两帧之间的相对位姿,和imu得到的相对位姿(也就是边)。
估计值就是由两帧的全局坐标(也就是节点)相减,得到的两帧之间的相对位姿。
然后还是一个最小二乘优化问题,进行求解。
这个时候又有个问题了,全局坐标里面,有里程计的数据,还有gps的数据,怎么选呢。
不用选,我全都要。
那就做两个优化目标函数,然后加起来,根据权重区分其中的重要性,最后依然是得到了一个组合的最小二乘优化函数。

总结
不用后端优化也能直接通过里程计建图,但是无法消除累计误差。
这次是一锅大杂烩,之后再拆开细讲。


















 772
772

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











