






前言
第四篇还没写完,就是跟着第三篇把剩余的几个模块源码给注释了一下。
先写第五部分,把控制这部分执行的顺序和数据流给写清楚。
一、路径跟踪部分
在启动了autoware_trajectory_follower_node中,controller_node.cpp中会不停的sub其他节点,主要是planning那边给的目标路径,定位给的车辆位置,车辆反馈的速度和转角等信息。
然后便会调用回调函数:callbackTimerControl()
在函数中,会根据提前在参数文件中选择的算法类型进行调用,并得到算法计算得出的控制量,我们这部分主要讲横向控制,具体调用如下:const auto lat_out = lateral_controller_->run(*input_data);
这句话就调用了mpc_lateral_controller.cpp中的run()函数,让我们到这个函数下。
在这个函数下,会有控制指令的输出:createCtrlCmdMsg()
输出的量为:ctrl_cmd
ctrl_cmd的在run函数中创建,然后在m_mpc->calculateMPC()函数中输入,进行处理。
让我们进入mpc.cpp文件的calculateMPC()函数。
这是整个mpc最核心的函数。
其中输入有:
当前车轮转角:current_steer
当前车辆位姿:current_kinematics
要发布的控制量:ctrl_cmd
要发布的预测路径:predicted_trajectory
要发布的调试值:debug_values
在这个函数中,首先根据planning给的目标路径m_reference_trajectory和当前速度位置速度,计算除了带有速度的目标路径。
然后在下面会进行控制指令ctrl_cmd的计算:
ctrl_cmd.steering_tire_angle = static_cast(u_filtered);
ctrl_cmd.steering_tire_rotation_rate = static_cast(calcDesiredSteeringRate(
mpc_matrix, x0_delayed, Uex, u_filtered, current_steer.steering_tire_angle, prediction_dt));
也就是要输出的车轮转角和角速度。
我们关注转角。
有两个中间量:u_filtered和u_saturated,是进行限幅和低通滤波,不去管它,我们继续往里面看。
Uex(0)是mpc的计算输出量。
计算是在 const auto [success_opt, Uex] = executeOptimization(
mpc_matrix, x0_delayed, prediction_dt, mpc_resampled_ref_trajectory,
current_kinematics.twist.twist.linear.x);
让我们继续看executeOptimization函数,这个是通过二次求解器求解mpc输出量的函数。
函数的输入有:
MPC 的预测方程矩阵:m
延迟补偿:x0
MPC 的预测时间步长:prediction_dt
目标路径:traj
当前车辆的纵向速度:current_velocity
输出有两个,前者是否优化成功,后者为Uex控制量。
计算流程就是先构建代价函数,然后放进qp求解器中求解:
m_qpsolver_ptr->solve(H, f.transpose(), A, lb, ub, lbA, ubA, Uex)
qp求解器的目的就是为了求解出可以使目标函数最小的控制量Uex。
如何求解的先不多说。
我们着重于这个二次规划问题的构建。
目标函数的标准形式:
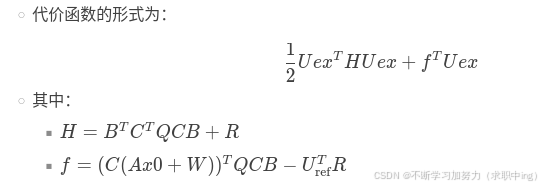 目标就是找到使代价函数最小的控制输入 U。
目标就是找到使代价函数最小的控制输入 U。
其中H和f这两个量就很重要。
代码中写了它俩的构建:
MatrixXd H = MatrixXd::Zero(DIM_U_N, DIM_U_N);
H.triangularView<Eigen::Upper>() = CB.transpose() * QCB;
H.triangularView<Eigen::Upper>() += m.R1ex + m.R2ex;
H.triangularView<Eigen::Lower>() = H.transpose();
MatrixXd f = (m.Cex * (m.Aex * x0 + m.Wex)).transpose() * QCB - m.Uref_ex.transpose() * m.R1ex;
addSteerWeightF(prediction_dt, f);
qp求解器中不涉及其他函数的调用。
这部分的构建有兴趣的可以研究一下,我这篇因为主要是看数据流,所以不在关注。
构架中用到了输入的参数m,那我们就回到calculateMPC函数中找m的生成过程: const auto mpc_matrix = generateMPCMatrix(mpc_resampled_ref_trajectory, prediction_dt);
generateMPCMatrix函数是用于生成预测方程矩阵和代价函数矩阵的核心函数。
输入参数:
参考轨迹,包含路径点、速度、曲率等信息:reference_trajectory
MPC 的预测时间步长:prediction_dt
输出:
返回一个 MPCMatrix 结构体,包含以下矩阵:
Aex:状态转移矩阵。
Bex:控制矩阵。
Wex:扰动矩阵。
Cex:输出矩阵。
Qex:状态误差的权重矩阵。
R1ex:控制输入误差的权重矩阵。
R2ex:控制输入变化的权重矩阵。
Uref_ex:参考控制输入。
我们进入函数看。
众所周知mpc是根据最小化预测轨迹和目标路径的差值,然后通过滚动优化,来找到最优控制量的。
mpc_matrix就是预测方程。
矩阵的运算和初始化就不多解释了。
继续关注数据流的情况。
generateMPCMatrix函数调用了:
m_vehicle_model_ptr->getDimX()获取车辆模型的状态维度
m_vehicle_model_ptr->getDimU()获取车辆模型的控制输入维度
m_vehicle_model_ptr->getDimY()获取车辆模型的输出维度
这三个在创建模型的车辆模型的时候就已经设置好了。
m_vehicle_model_ptr->setVelocity(ref_vx);设置车辆模型的当前速度。ref_vx:参考速度(来自参考轨迹)。
m_vehicle_model_ptr->setCurvature(ref_k);设置车辆模型的当前曲率。ref_k:参考曲率(来自参考轨迹)。
这俩直接从参考轨迹来的。
m_vehicle_model_ptr->setCurvature(ref_smooth_k);设置车辆模型的 平滑曲率。
这个直接返回的ref_smooth_k的值。
m_vehicle_model_ptr->calculateDiscreteMatrix(Ad, Bd, Cd, Wd, DT);计算离散状态矩阵。根据当前车辆模型的状态(速度、曲率等),计算离散状态矩阵。
m_vehicle_model_ptr->calculateReferenceInput(Uref);计算参考控制输入(前馈控制)。根据当前车辆模型的状态(速度、曲率等),计算参考控制输入。
这个是主要的功能。
还有几个计算权重的, 先不管了。
m_vehicle_model_ptr的构建在mpc_lateral_controller.cpp中,具体实现则在vehicle文件夹下,下面有三种模型可供选择。
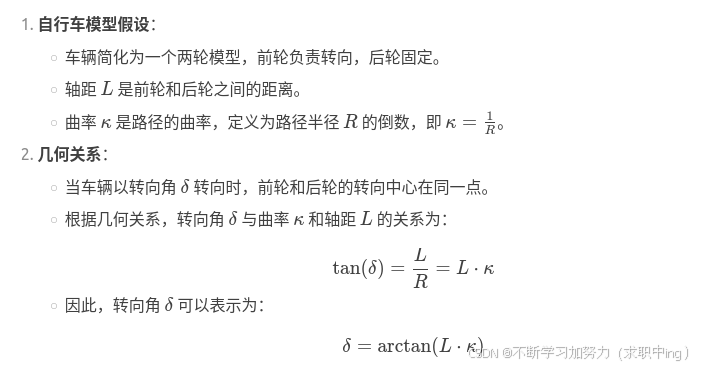
我们来看其中较为简单的,自行车运动学模型:vehicle_model_bicycle_kinematics.cpp
开始的构造函数:
KinematicsBicycleModel::KinematicsBicycleModel(
const double wheelbase, const double steer_lim, const double steer_tau)
: VehicleModelInterface(/* dim_x / 3, / dim_u / 1, / dim_y */ 2, wheelbase)
{
m_steer_lim = steer_lim; // 设置转向角限制
m_steer_tau = steer_tau; // 设置转向时间常数
}
里面的3,1,2就是m_vehicle_model_ptr->getDimX()这三个要的状态纬度。
再看里面calculateDiscreteMatrix(Ad, Bd, Cd, Wd, DT)这个函数。就是离散矩阵计算,没什么说的。
看calculateReferenceInput(Uref)。根据轴距和曲率计算车轮转向角,这个就是自行车模型的核心了:
在这个文件中,还有一个函数很重要,就是calculatePredictedTrajectoryInWorldCoordinate,计算预测轨迹,发布的预测轨迹供lane_departure_checker_node节点和predicted_path_checker_node使用。
这就是横向跟踪控制的数据流。
总结
除了横向跟踪数据流之外,别的control数据流会在之后的文章中讲解。


















 1706
1706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











