







前言
之前在没有真正接触CANFD时,理解的CANFD报文只是两个主要变化点:
1.波特率可切换
2.数据位拓展为64位
这样的话,对于之前的CAN报文来说,DBC可以很好的兼容CANFD报文,只需要定义好message中的layout即可。但目前实际使用过程中,并不是简单的一个message包括一个PDU,而是通过Arxml文件引入了Container-PDU和I-signal-PDU,一个CANFD的frame中可能包含多个I-signal-PDU。
PDU类型定义
在Arxml文件中定义的有如下类型:
| PDU Type | Application/Idea |
|---|---|
| ISignal-I-PduDU | AUTOSAR COM标准信号PDU |
| N-PduDU | transport layer诊断TP层 |
| NmM-PduDU | Network Management网络管理 |
| XcpCP-PduDU | XCP=Universal Measurement and Calibration ProtocolXCP标定 |
| Multiplexed I-PDUdu | 多路复用PDU |
| varying Signal I-PDUs at the same position | |
| General-Purpose-PduDU | — |
| General-Purpose-I-PDUdu | with category XCP replaces the deprecated XCP-PDU |
| DcmCM-I-PduDU | Diagnostic Communication Manager |
| Container-I-PduDU | 容器PDU,存放多个其他PDU |
| UserDefinedPduDU | 用户自定义 |
| UserDefinedIPduDU | 用户自定义 |
| SecuredIPdu | Refers to an IPdu, that is protected against unauthorized manipulation |
| J1939DcmIPdu |
对于标准CAN通讯来说,比较常用的就是ISignal-I-Pdu,Container-I-Pdu。后面再详细介绍。
Autosar定义的PDU
| Abbreviation/ Acronym: | Description: |
|---|---|
| COM I-PDU | I-PDU assembled in the COM module out of COM Signals |
| contained I-PDU | I-PDU assembled into or extracted from a Container PDU对应Arxml中的多种PDU类型 |
| Container PDU | PDU containing I-PDUs and headers包含多种PDU |
对于普通CAN报文来说,一个message对应一个PDU,对于CANFD报文来说,引入Container PDU和contained I-PDU实现一个message对应多组PDU。
考虑这样做的优势:
不同的contained I-PDU可以映射到不同的Container PDU的不同位置。不仅提高了灵活性,而且也会降低总线负载率。
动态Container布局
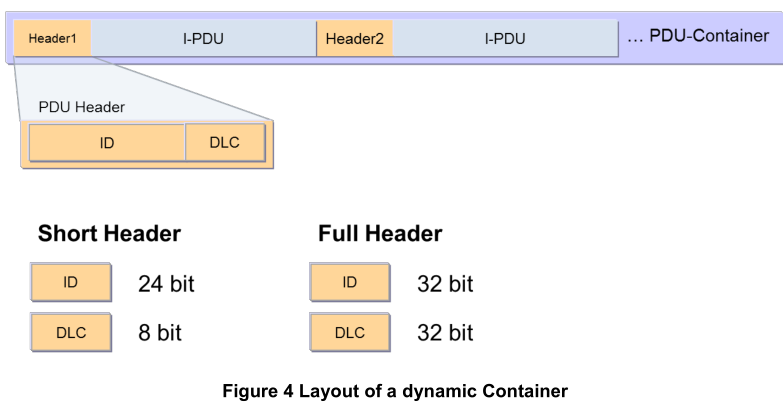
Autosar引入了动态Container的layout,也就是说PDU存在的位置是不固定的,将PDU Header和I-PDU打包后可以放入不同Container PDU的不同位置中。
可以这么理解:PDU Header就是之前普通CAN报文的ID和DLC。
CANFD ContainerPDU定义
ContainerPDU并不是frame,但可以设置ContainerPDU包含frame所有的数据位。ContainerPDU是包含在frame中的。
对于一个CANFD-frame,定义如下:
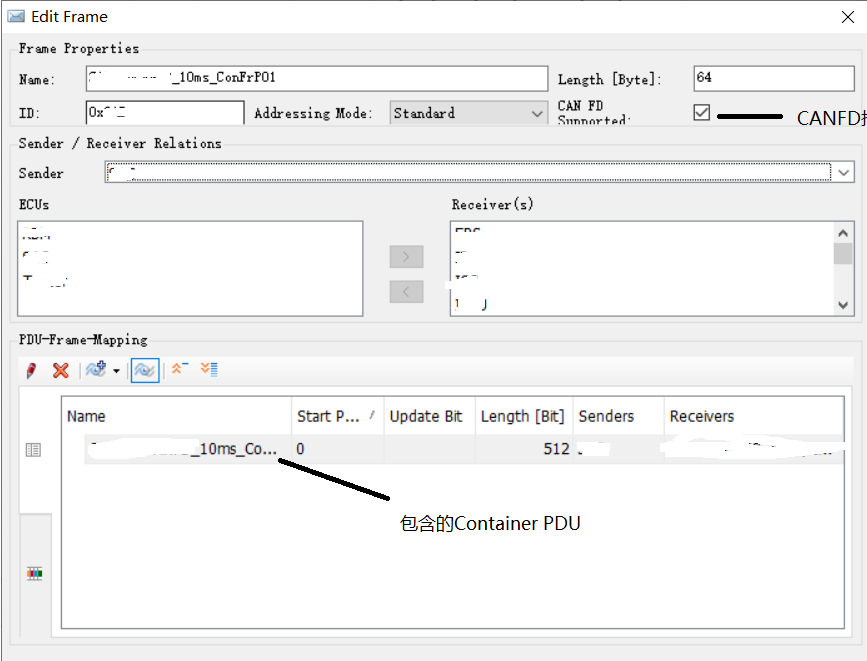
注:若CANFD报文实际只有8字节,那么就和普通报文一样,定义一个I-Signal-PDU就够了,不需要引入容器PDU。
Container-I-PDU定义如下:
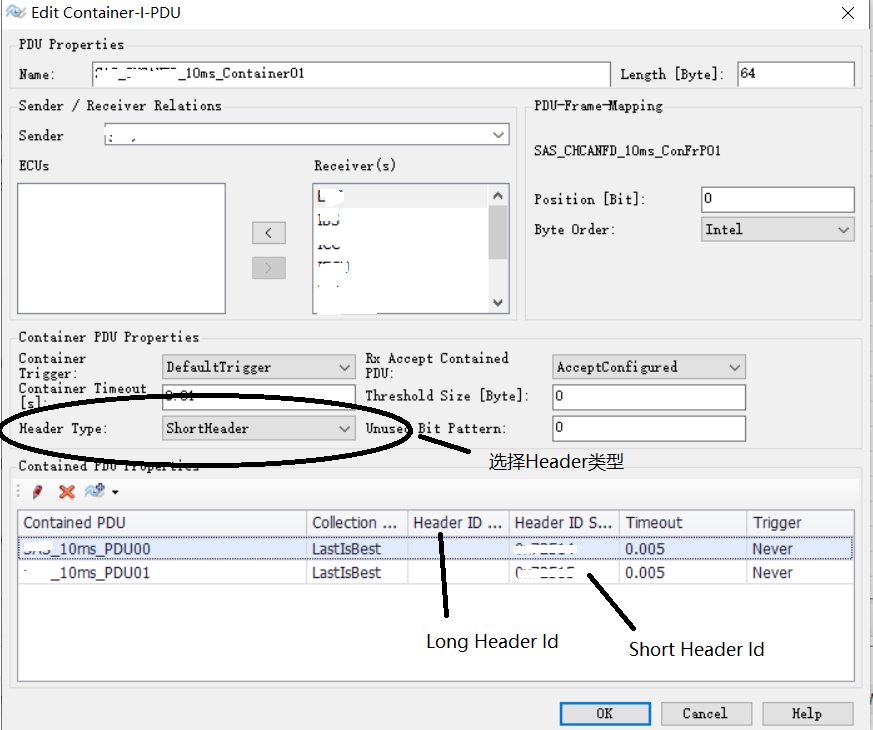
Header Type有三种选择:
1.ShortHeader 2.LongHeader 3.NoHeader
Autosar中定义如下:
IpduM支持两种不同的动态Container Pdu的头大小(参见ECUC_IpduM_00183: IpduMContainerHeaderSize):
IPDUM_HEADERTYPE_SHORT, 24位ID, 8位长度
IPDUM_HEADERTYPE_LONG, 32位ID, 32位长度
如果是选择的ShortHeader,那么实际数据位中会有三个byte为ID,一个byte为DLC,8个byte为数据位
在Container-PDU定义页可以选择包含的PDU及设置PDU对应的ID。
CANFD Signal-I-PDU定义
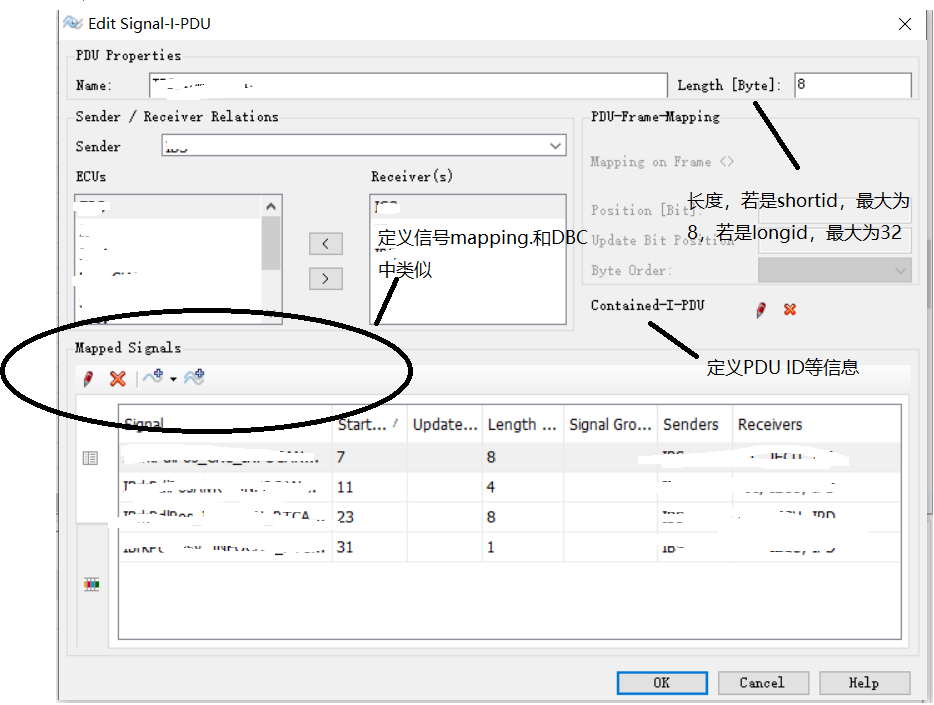
这个Signal-I-PDU就类似普通的CAN报文,里面定义了具体的信号信息,及layout信息。
CANFD实际数据解析

CANFD带Container的报文,实际数据长度为24,包含两个Signal-I-PDU(每个12个byte)
对应的Signal-I-PDU还可以继续展开解析后的信号具体信息

总结
CANFD报文若使用contained I-PDU和Container PDU,则DBC不适合再用来管理通讯矩阵,需要采用Arxml文件来管理。若没有选择使用HeaderID和DLC,则DBC还可以继续使用,对于应用来说,相对于CAN的DBC只是长度增加而已。
使用I-Signal-PDU,使得CANFD报文中的信息更加灵活,对于网关转发,信号解析更加方便。
目前主要只用到了I-Signal-PDU,若用到其他的,会持续更新本文~~
若你觉得本文对你有帮助,欢迎点赞,关注,收藏,转发~~~
你的鼓励是对小弟的最大支持~~~
建了一个WX公众号,《汽车电子学习笔记》感兴趣可以关注一下~~~文章都会同步更新~



















 593
593

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











