






 因研究机器人仿真,需将三维CAD模型信息导出为URDF文件,故使用SolidWorks to URDF Exporter插件。本文介绍其详细步骤,包括从ros官网下载对应版本插件、安装(可调整路径)、重启软件确认安装,最后配置并选择导出对象,通过工具入口启用插件。
因研究机器人仿真,需将三维CAD模型信息导出为URDF文件,故使用SolidWorks to URDF Exporter插件。本文介绍其详细步骤,包括从ros官网下载对应版本插件、安装(可调整路径)、重启软件确认安装,最后配置并选择导出对象,通过工具入口启用插件。
前言
因为研究机器人仿真,需要将三维CAD建模软件里创建好的模型的信息导出为URDF文件,因此使用SolidWorks to URDF Exporter这款solidworks插件。介绍一下详细步骤。
一、插件安装步骤
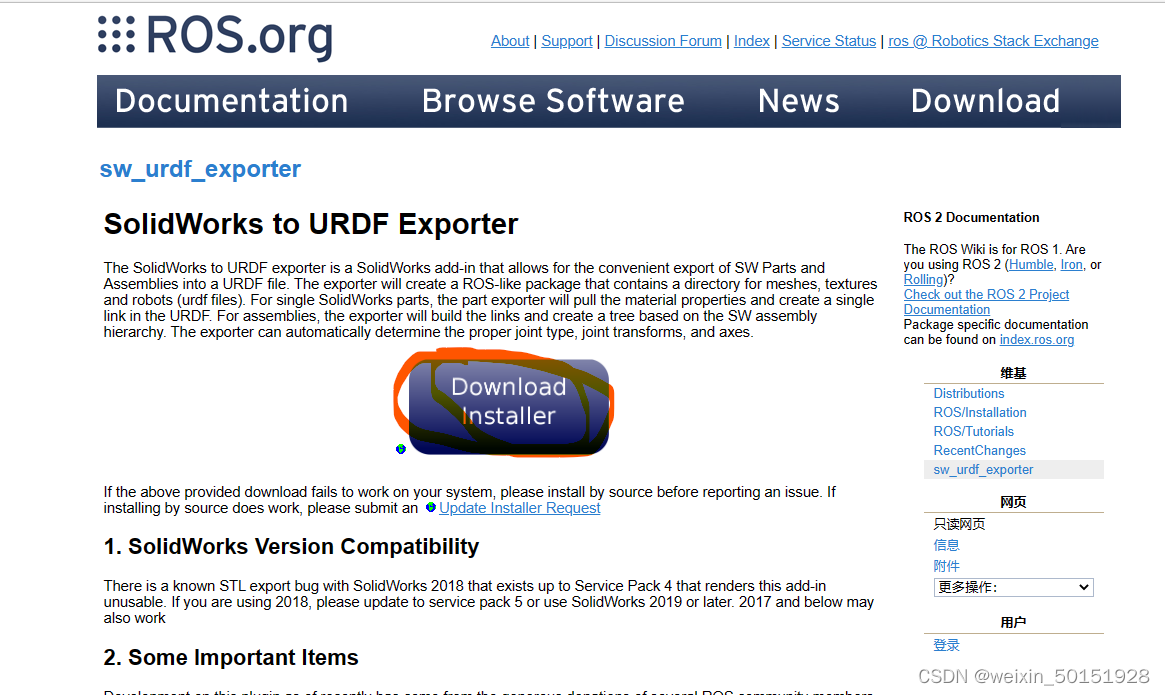
1、ros官方网站下载exe格式的插件,网址如下sw_urdf_exporter - ROS Wiki http://wiki.ros.org/sw_urdf_exporter下载位置如下,单击“Download Installer”
http://wiki.ros.org/sw_urdf_exporter下载位置如下,单击“Download Installer”
然后会跳转到github网页,根据自己solidworks的版本选择对应的插件版本。我的SW2020,对应
插件版本为v1.6.0,大小为2.96M.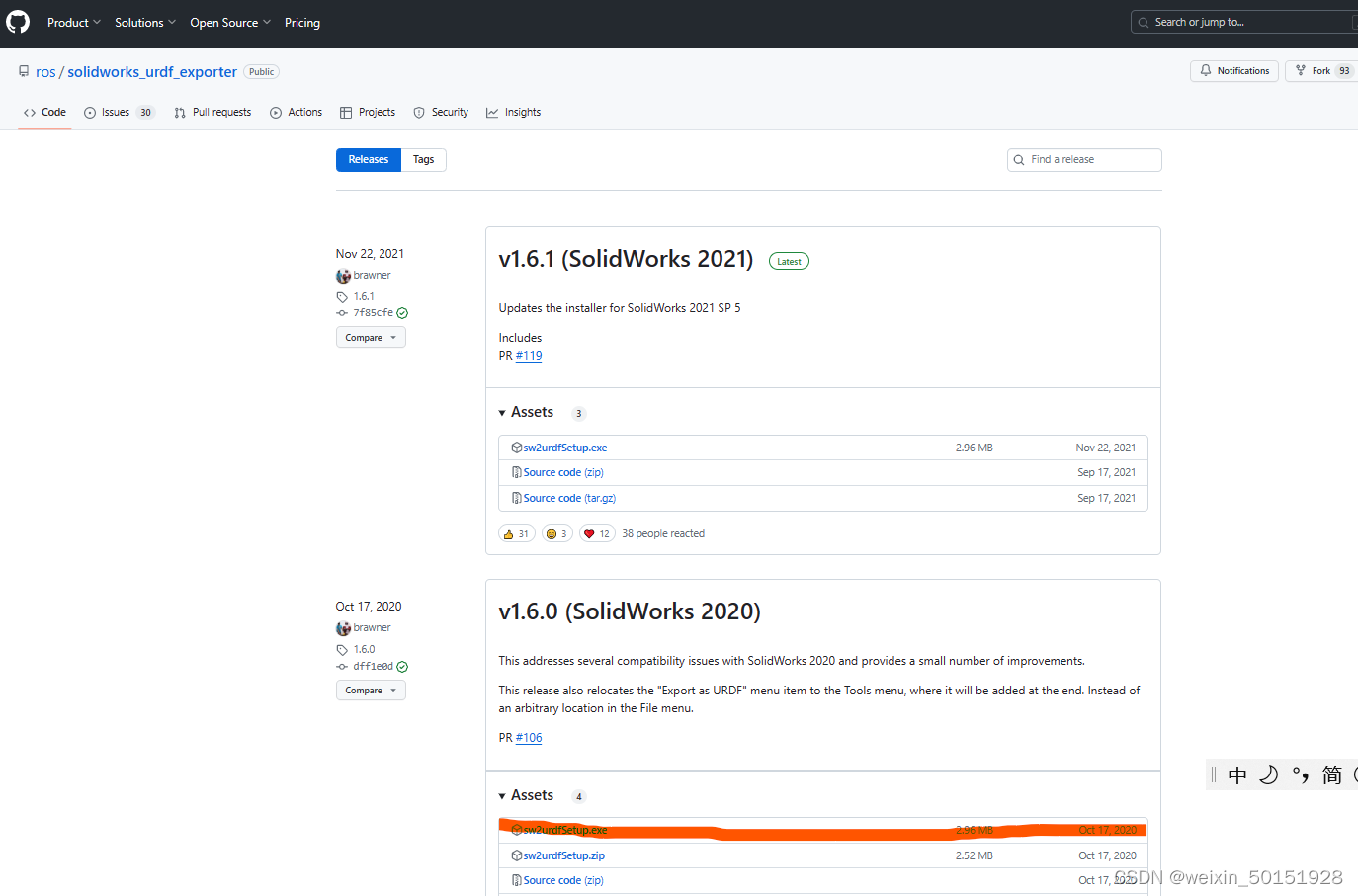
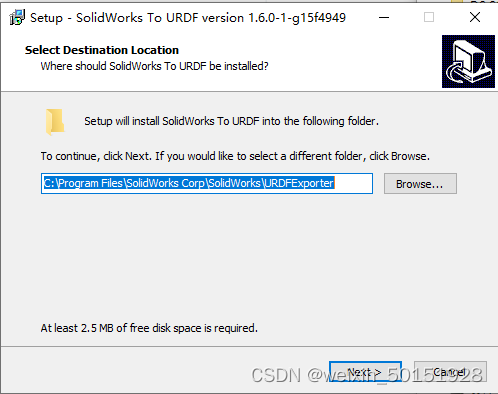
2、插件安装
默认路径是C盘
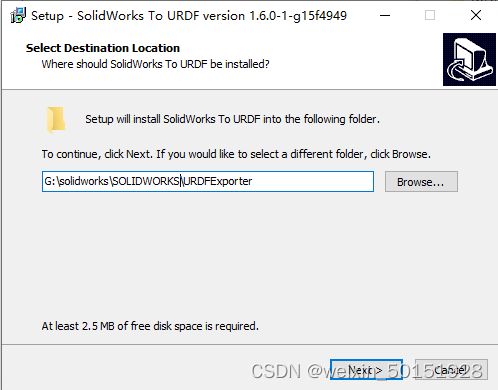
因为我的sw2020没有安装到c盘,因此插件安装位置也相应调整如下
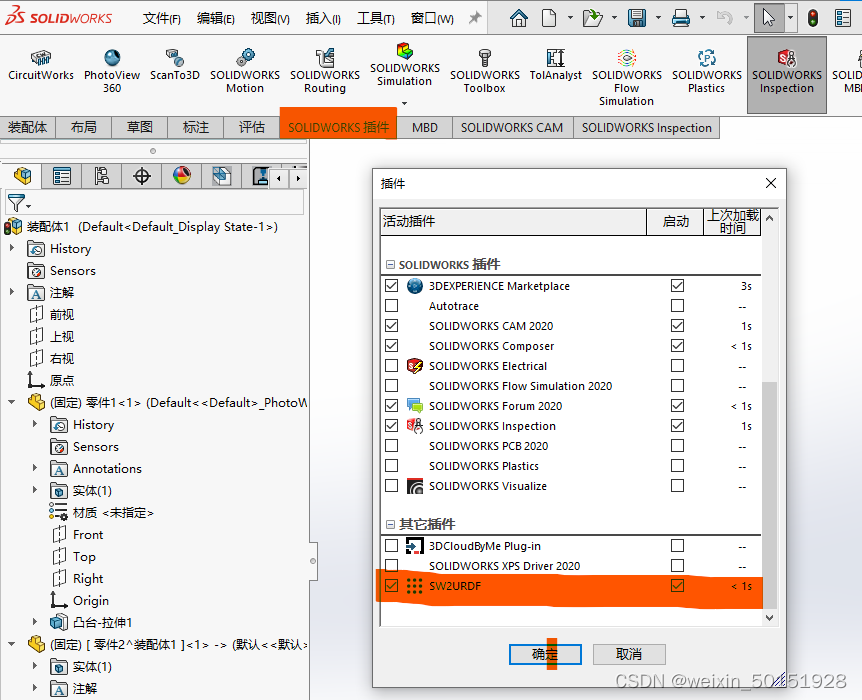
安装插件后重启软件,确认插件是否安装成功,如下图
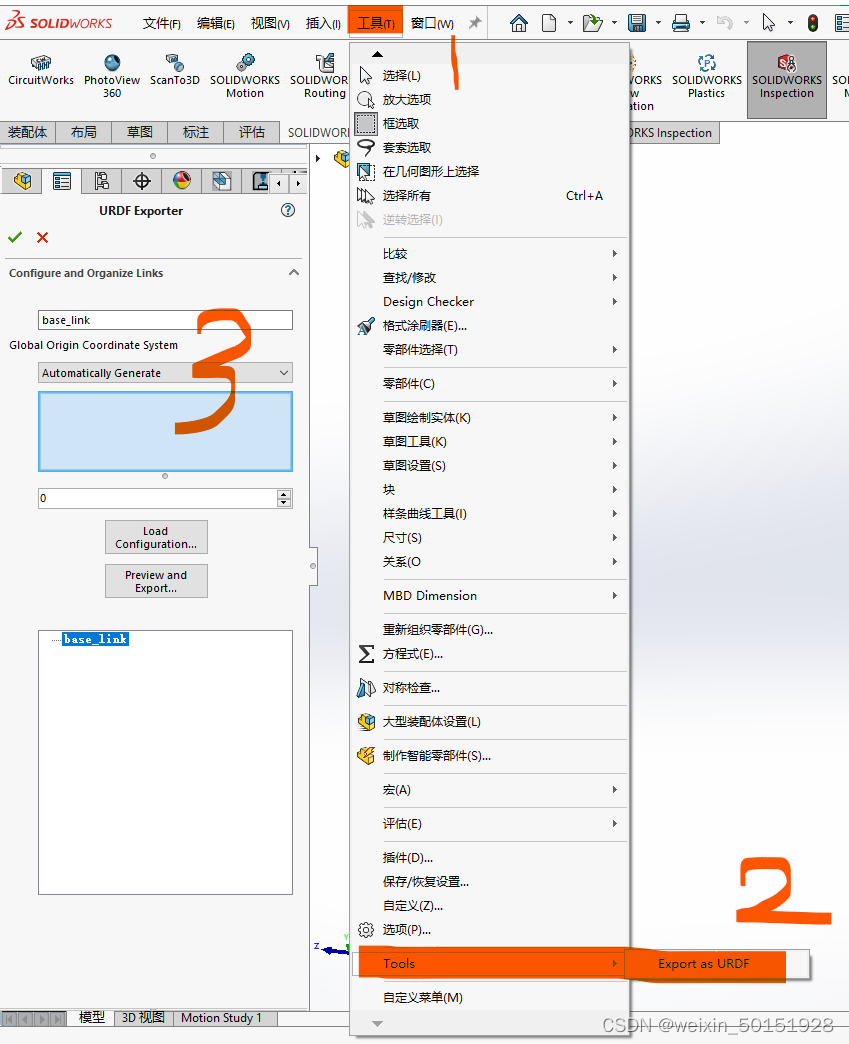
3、插件的启用入口
如下图,先根据需求配置并选择要导出的对象,然后工具->Tools->Export as URDF
至此,插件可以使用了。

















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









