







目录
一、简介
大家好,欢迎关注遨博学院带来的系列技术分享文章(协作机器人ROS开发),今天我们来学习SolidWorks插件生成机械臂URDF功能包。
在前面课程中,我们使用SolidWorks生成了机械臂的DH坐标系,本节课讲解如何使用插件导出机械臂的URDF功能包。
SolidWorks插件生成机械臂URDF功能包
二、环境版本
- 主机系统版本:Windwos10 64位
- 处理器型号:Intel-i7
- SolidWorks版本:2018 (用户自行安装)
- 机械臂模型:AUBO E5带独立底座
三、学习目标
四、知识储备
首先了解下URDF插件的作用和安装方法。
当机器人比较复杂时,URDF编写会有很大工作量,不可能全部手动定义。ROS目前在SolidWorks中提供了自动生成URDF文件的插件。官网下载插件安装包默认安装即可,之后重启SolidWorks软件,查看插件选项下是否包含SW2URDF,如图所示。
接下来学习URDF模型的标准化约定。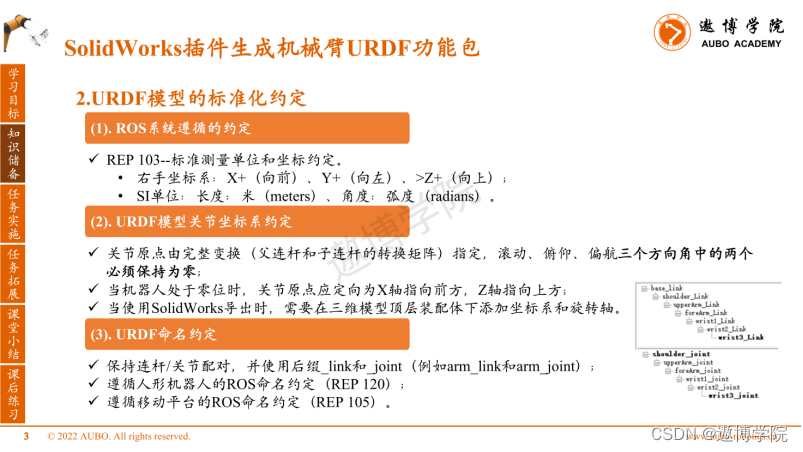
五、任务实施
本课程使用《遨博E5 DH参数SolidWorks建模》课程中创建的带有基准轴、原点和坐标系的SolidWorks工程。
生成机械臂URDF功能包包含以下6步。
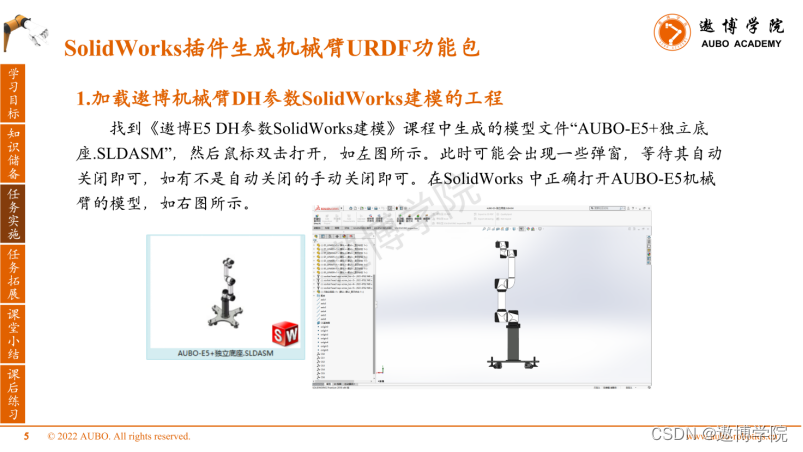
1.加载遨博机械臂DH参数SolidWorks建模的工程
找到模型文件,鼠标双击打开,工程加载完毕如图所示。
2.加载SolidWorks to URDF插件界面
依次点击菜单栏【工具】-【File】-【Export as URDF】,加载URDF插件窗口如图所示。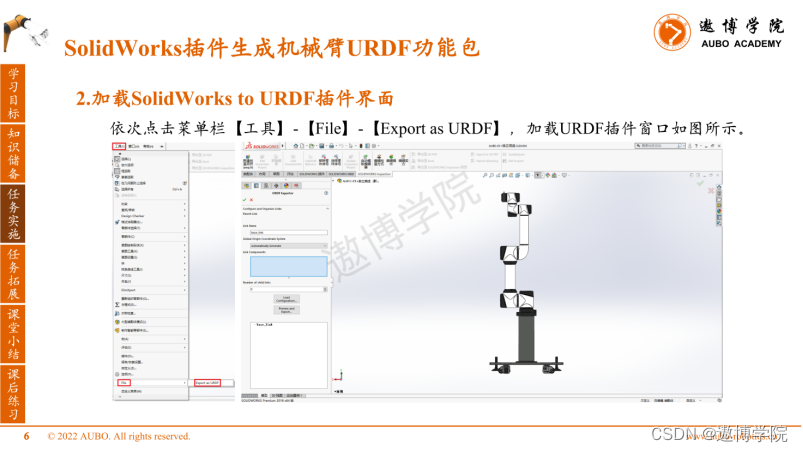
3.配置和组织机械臂各连杆
首先配置基座。
接下来配置机械臂的6个连杆属性。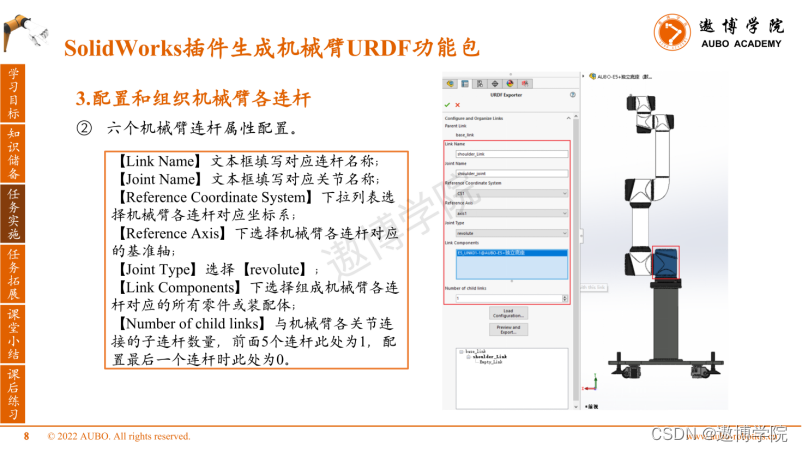
4.配置机械臂各关节运动学参数
在上一步中最后一个连杆配置完毕后,点击【Preview and Export】,弹出【Configure Joint Properties】窗口,如图所示。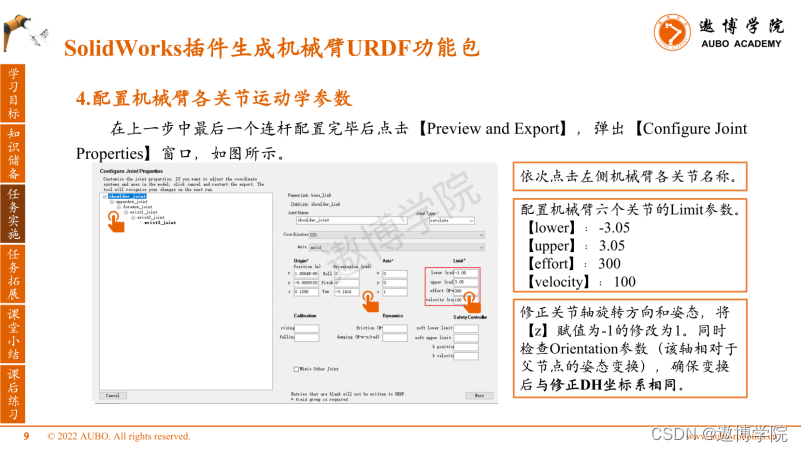
5.配置机械臂各连杆动力学参数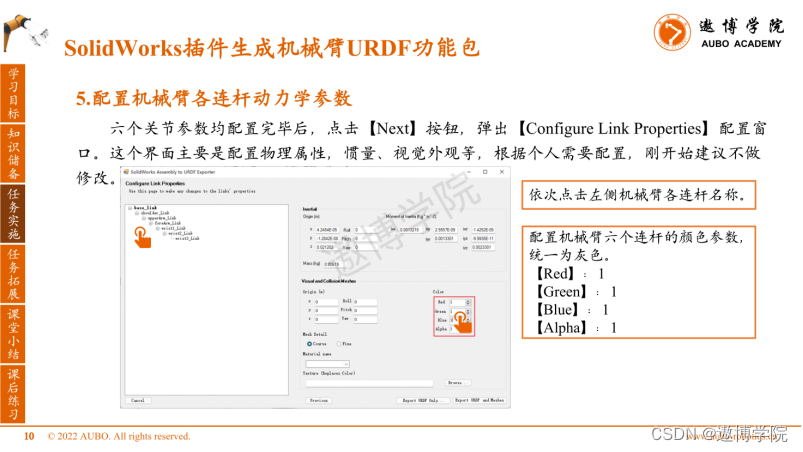
6.导出生成URDF功能包
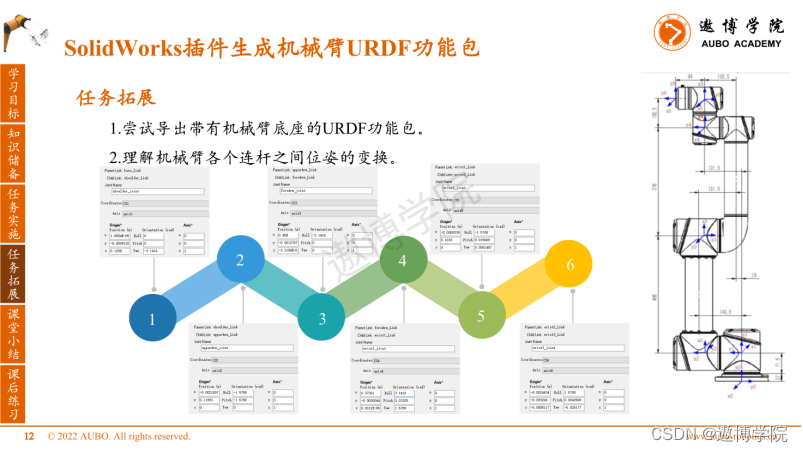
六、任务拓展
1.尝试导出带有机械臂底座的URDF功能包。
2.理解机械臂各个连杆之间位姿的变换。
七、课堂小结
通过本篇文章的学习,用户可以基本掌握遨博E5机械臂通过SolidWorks插件生成URDF功能包下的方法。在操作过程中需要注意以下两点。
八、课后练习
在接下来的ROS课程中,我们会讲解《机械臂URDF功能包ROS仿真》,欢迎持续关注。
















 2302
2302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









