







一、Solidworks(2020版本)
1.下载URDF插件
URDF插件【官方下载】地址如下:
2.建立机械臂坐标系(本文用的是六轴机械臂)
2.1建立坐标系的原点
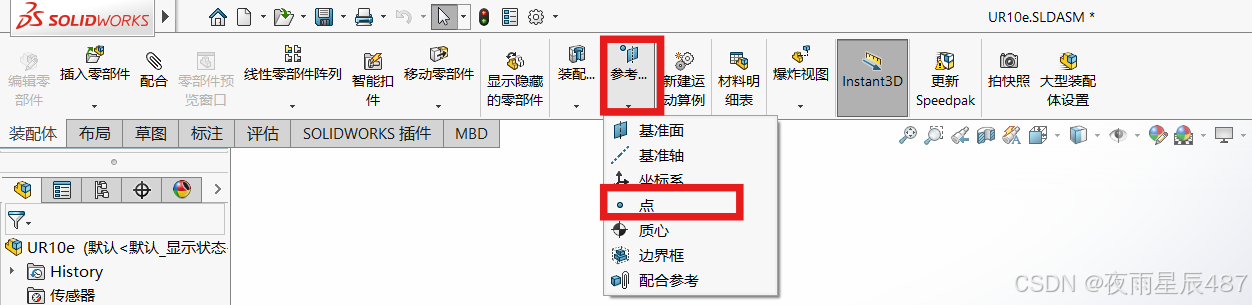
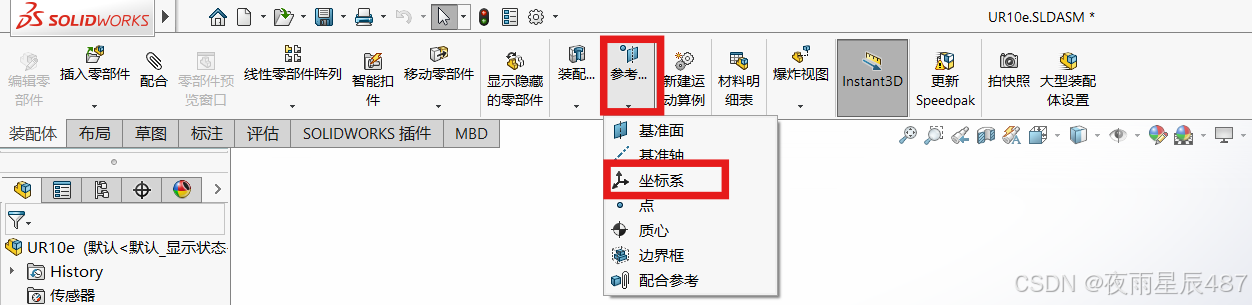
a.在SolidWorks功能区,点击【参考几何体】。
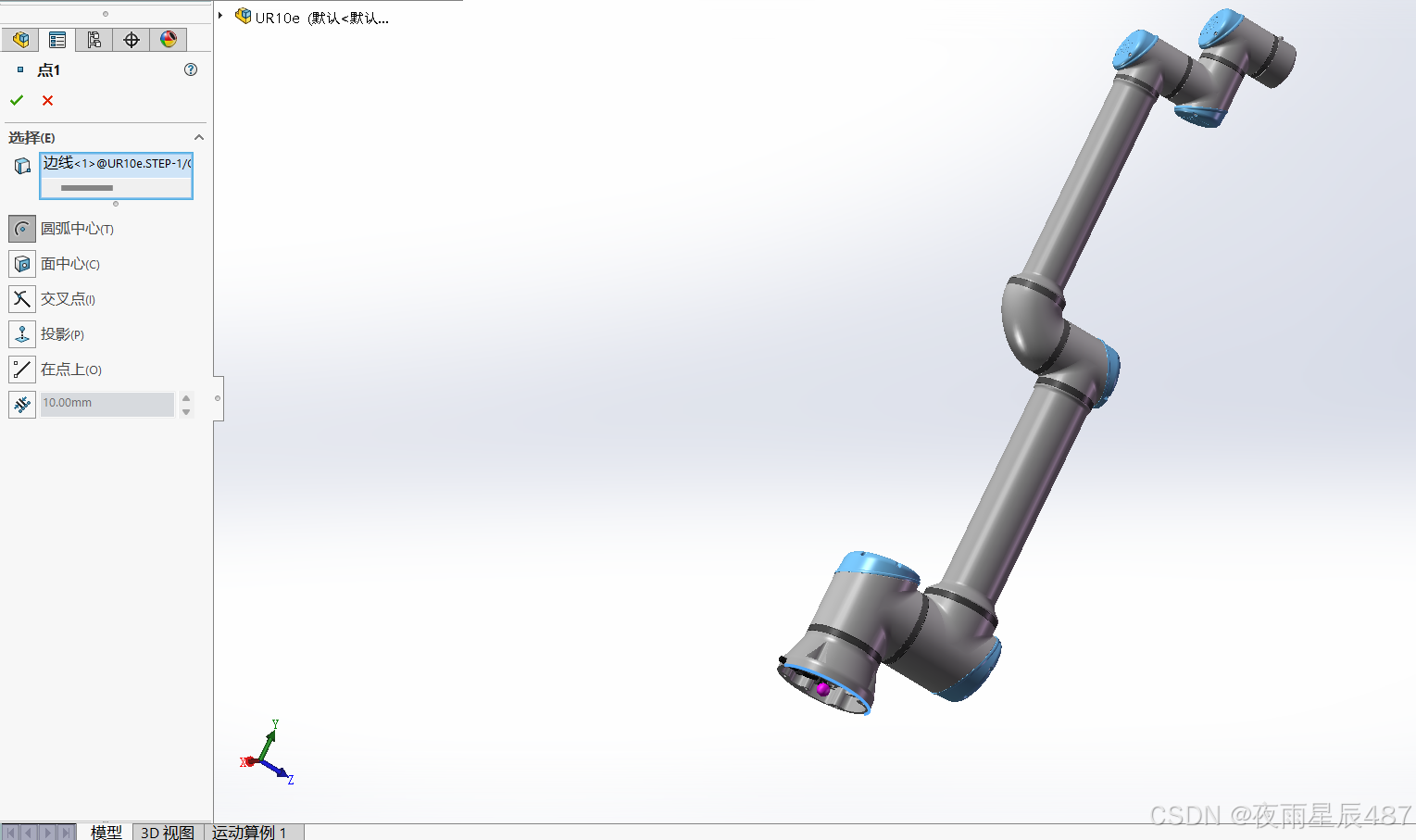
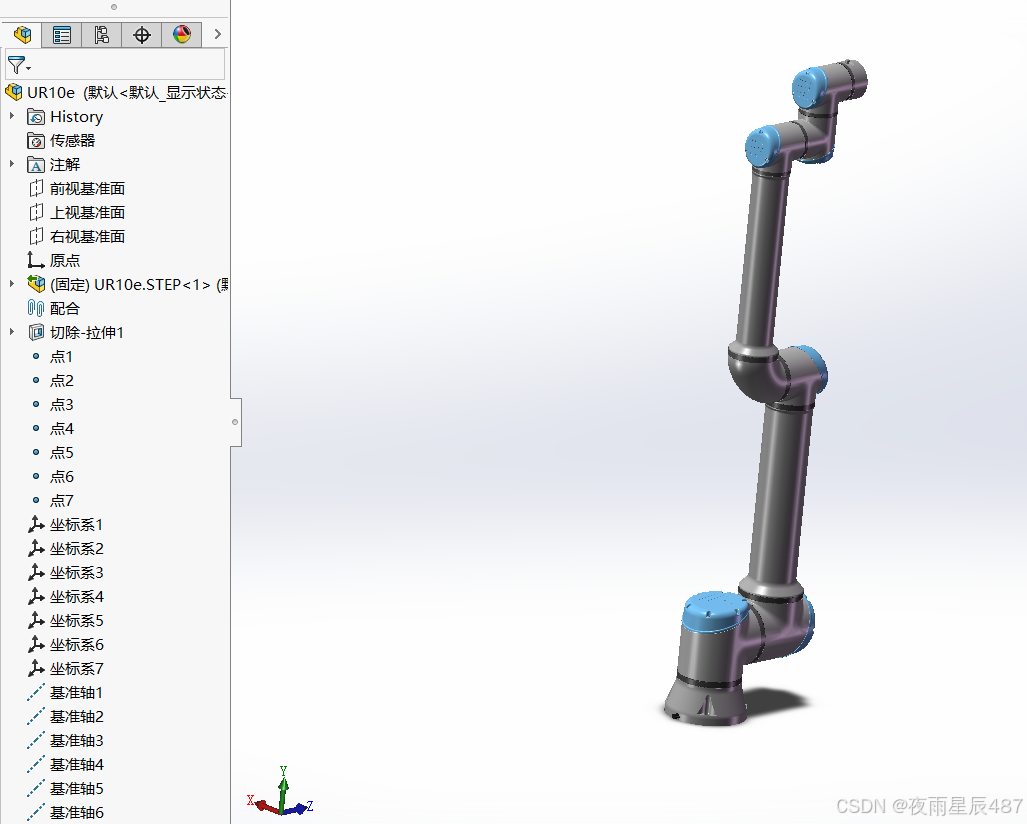
b.选择【点】,在机械臂基座上点击一个圆柱面(该圆柱面中心通常与第一个关节旋转轴在同一条线上);在第一个关节位置,点击电机旋转轴所对应圆柱面,建立了第二个点;以此类推,直到机械臂第六个关节旋转轴的点建立完成;综上,一共建立了7个点。
我设置第一个点为机械臂底座的坐标轴原点
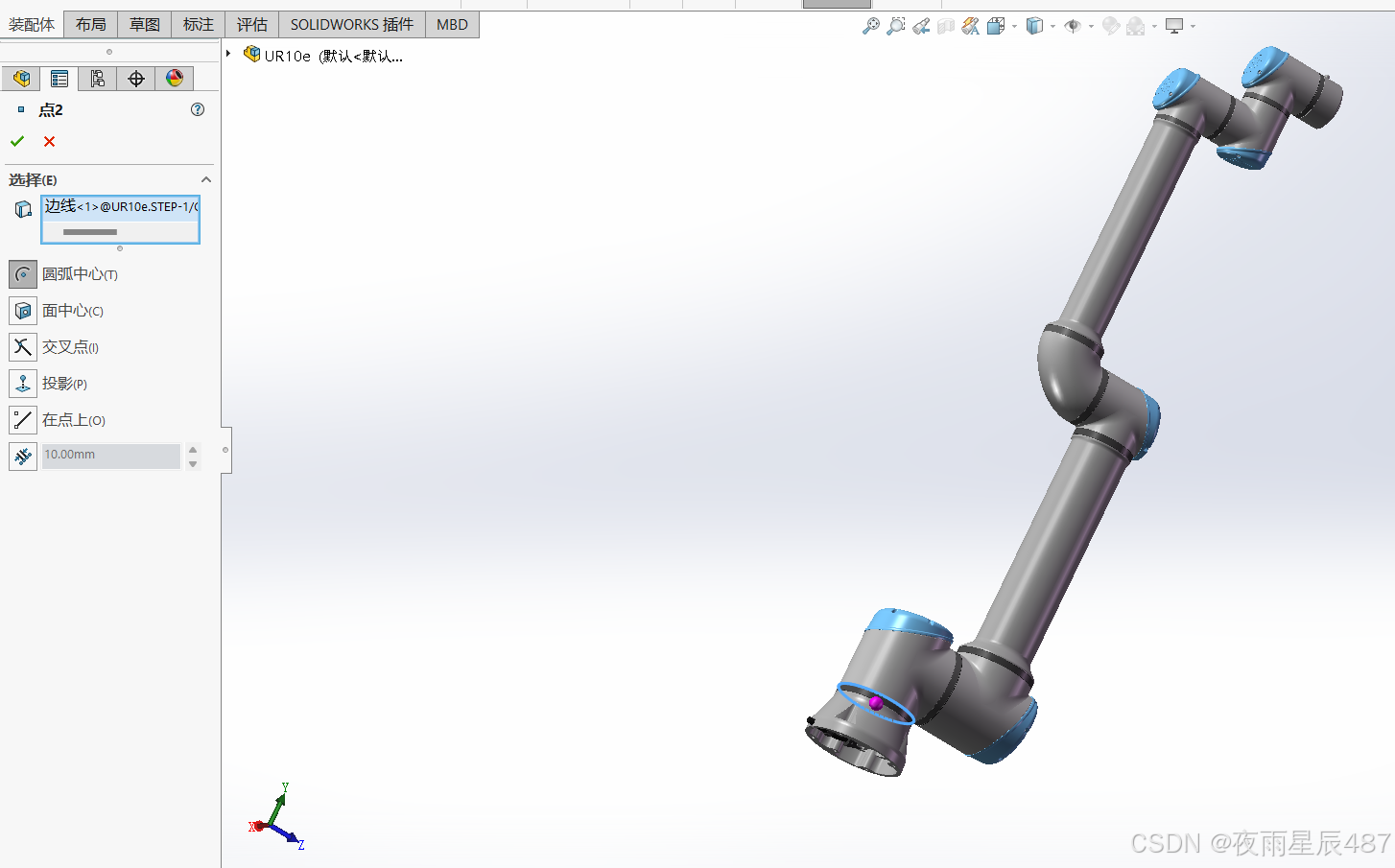
第二个原点也是同样的操作,其他的点以此类推
2.2建立坐标系
选择【坐标系】,先点击机械臂基座的“点”,然后点击【参考几何体】的【坐标系】,将Z轴方向设成垂直机械臂基座朝上(Z轴参考面选择一个与底座平行的任意面即可),综上,一共建立了7个坐标系。
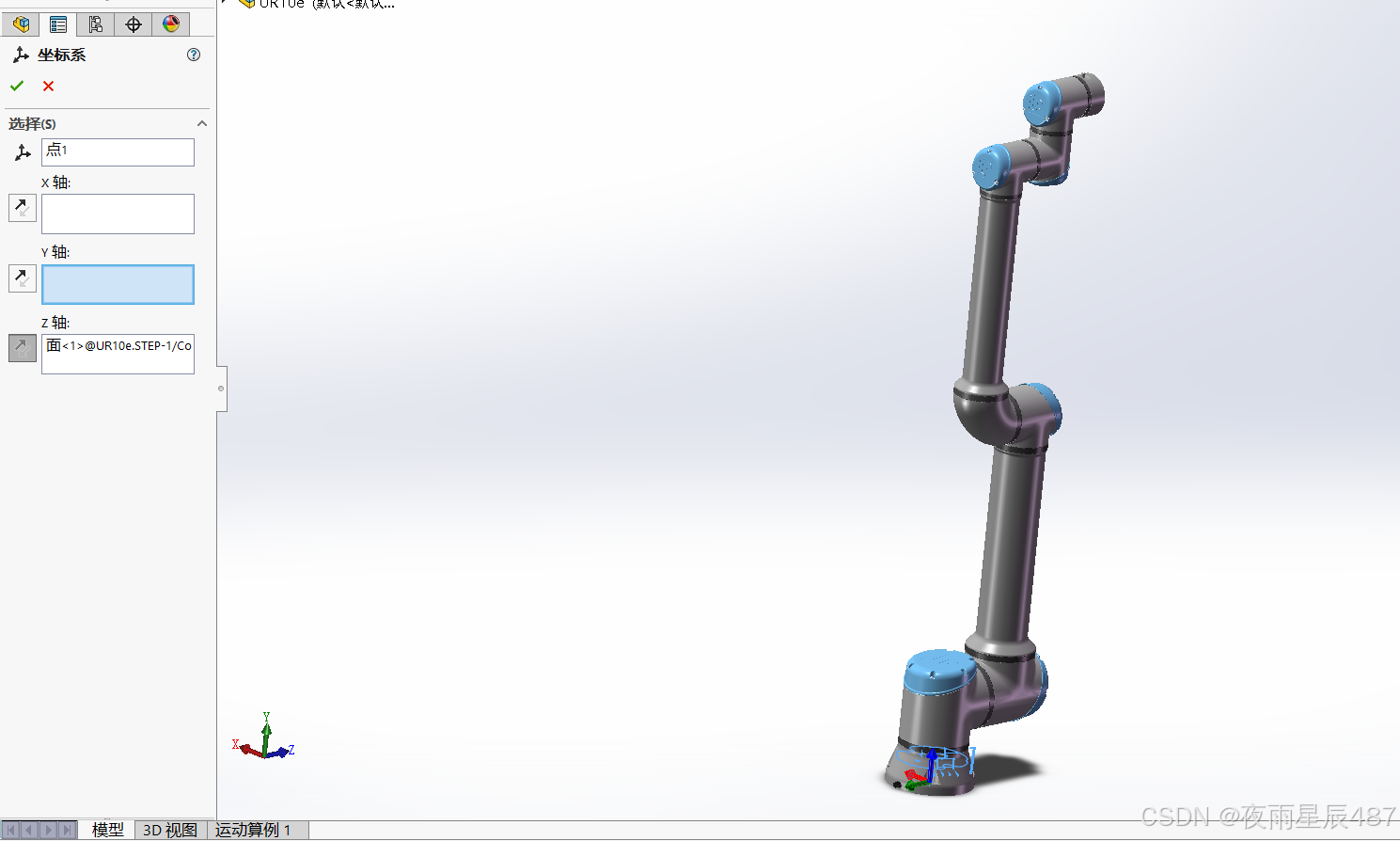
后面剩余的六个坐标系以此类推即可。
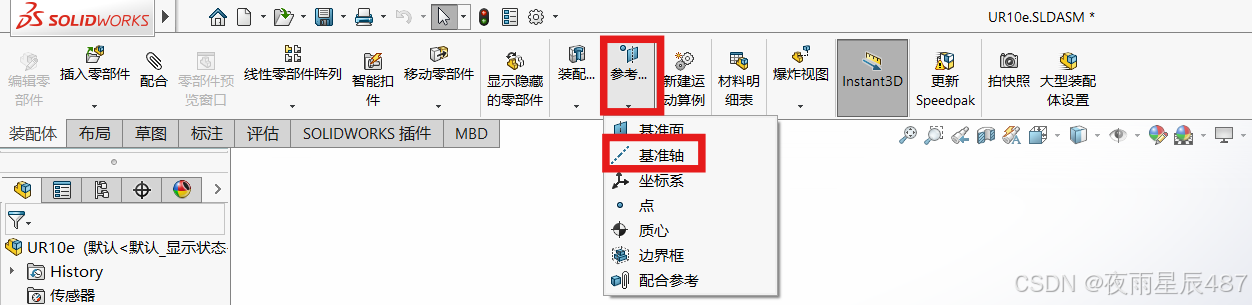
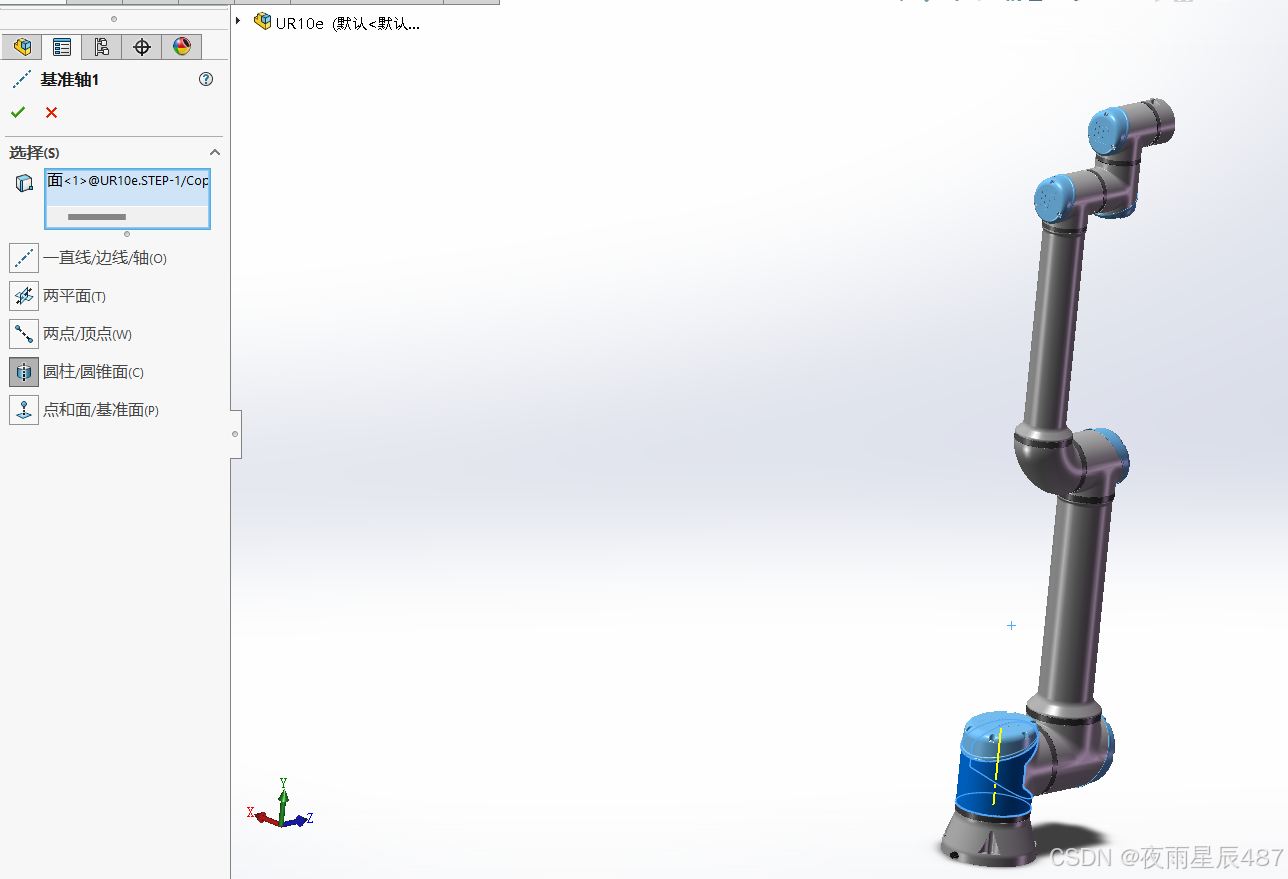
2.3建立基准轴
选择【基准轴】,由于机械臂基座为静止状态,没有旋转运动,因此无需建立基准轴。从第一个关节开始,依次点击要旋转的关节,完成基准轴的建立;综上,一共建立了6个基准轴。
最后建完后就会如下图所示:
3.转换URDF文件
3.1加载URDF插件
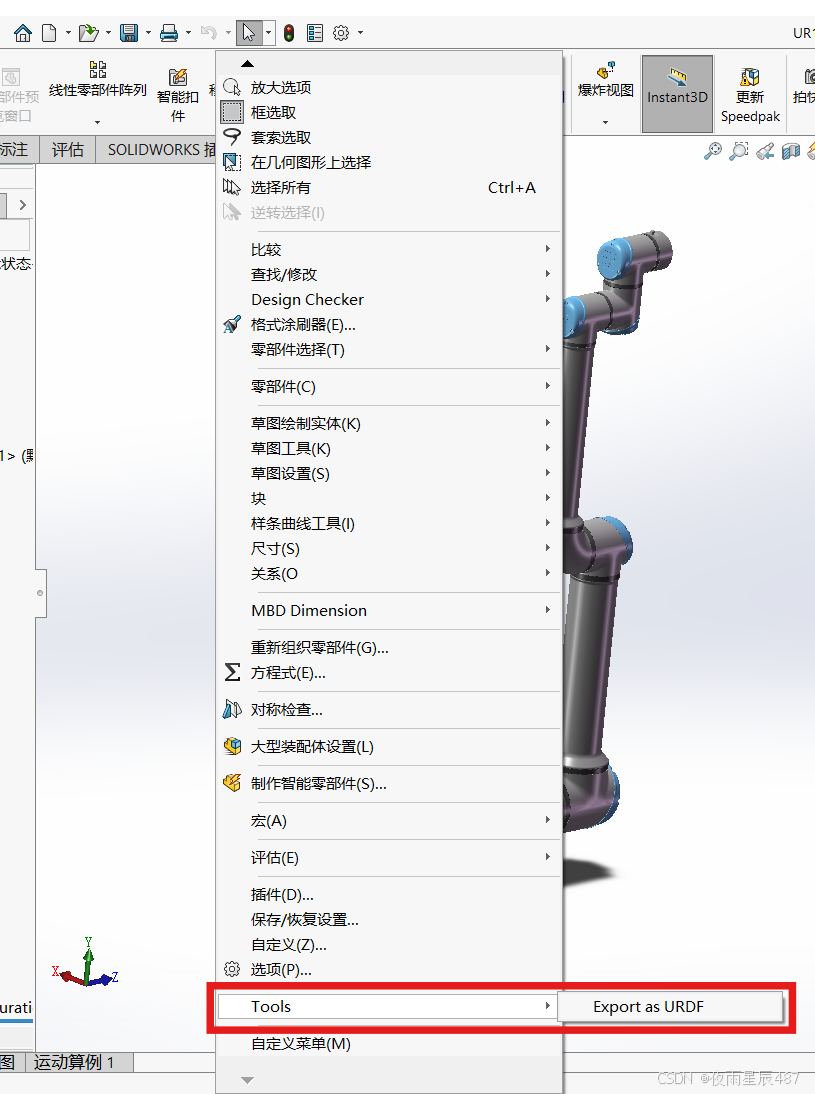
在SolidWorks顶部菜单栏点击【工具】,点击最下方三角形图案,往下翻阅,点击【Tools】→【Export as URDF】,如下图所示。
3.2配置机械臂参数
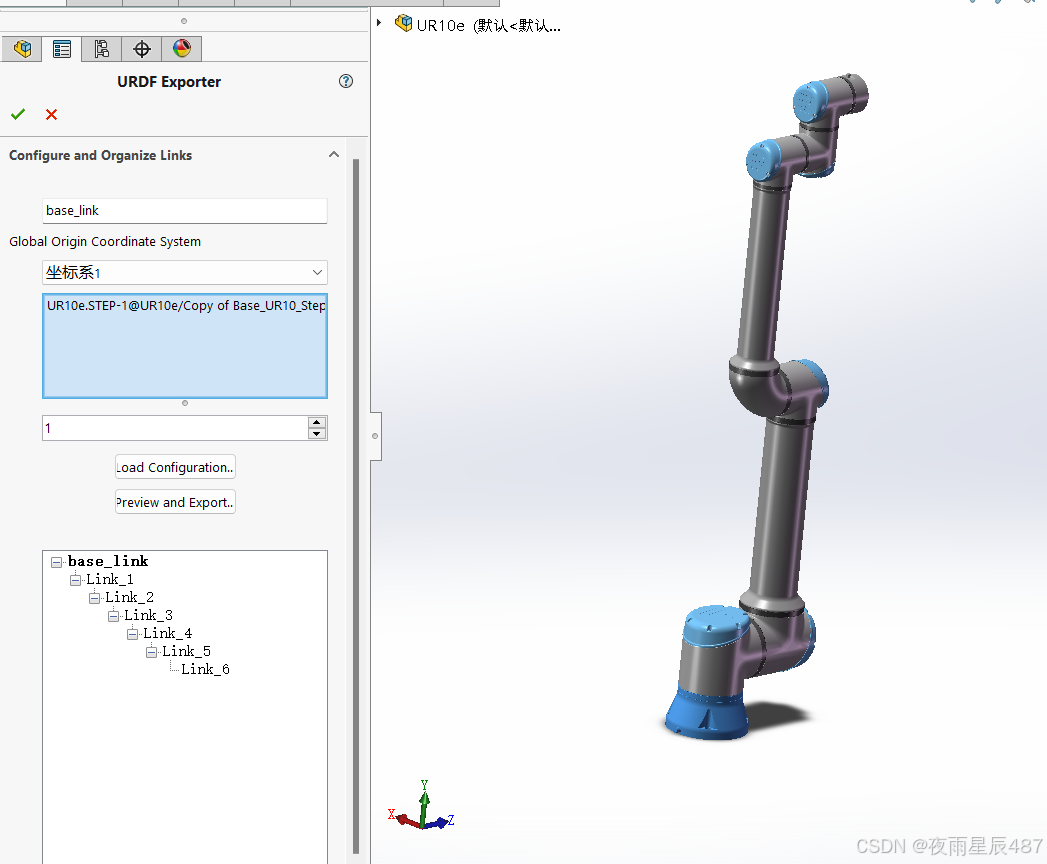
如下图所示(此图是已经配置好的,原本只有base_link)
【Link Name】:填写机械臂的基座名称,通常命名为base_link。
【Global Origin Coordinate System】:机械臂基座所对应参考坐标系,选择坐标系1。
【Link Components】:选择组成机械臂基座(base_link)的所有零件,如下图所示蓝色部分。
【Number of child links】:与机械臂基座(base_link)连接的子连杆数量,此处为1个。下面的base_link就会出现Empty_Link
然后点击base_link下的Empty_Link。
点击Empty_Link之后
【Link Name】:填写机械臂基座的子连杆名称,便于区分,将该子连杆命名为link_1。
【Joint Name】:填写关节名称,该关节连接的2个连杆为:base_link和link_1,我将该关节命名为joint_1。
【Reference Coordinate System】:连杆link_1所对应的坐标系,选择坐标系2。
【Reference Axis】:连杆link_1的旋转轴,选择基准轴1。
【Joint Type】:关节类型
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 3689
3689

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











