









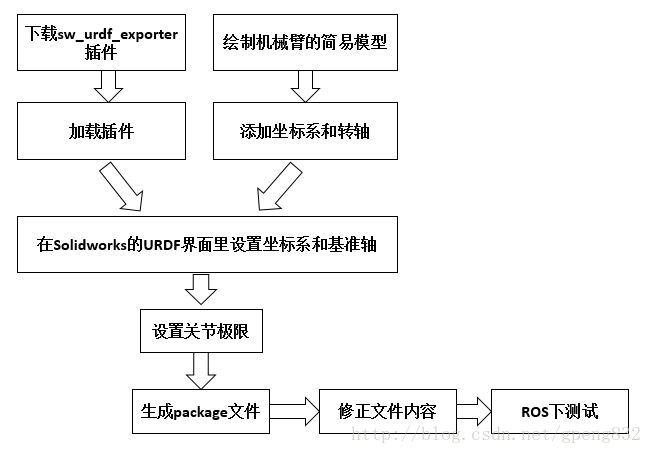
01 solidworks导出urdf文件
-
官网下载插件:http://wiki.ros.org/sw_urdf_exporter
然后到github上下载插件,虽然我是solidworks2022,但因为目前只更新到v1.6.1 (SolidWorks 2021),所以就下载这个版本了。
下载exe文件,双击安装,安装完成后打开/重启solidworks,在“选项(最上方菜单栏 最右边的小齿轮)-> 插件”里看sw2urdf是否安装成功

-
添加基准轴、坐标系
sw菜单栏“插入 -> 参考几何体 -> 基准轴”。对于插入基准轴,我的方法是先插入点,选中选中旋转轴的面,有一个选项就是在面的中心插入一个点;在两个面分别生成点,然后设计树里面ctrl选中两个点,然后在插入轴。
-
菜单栏“
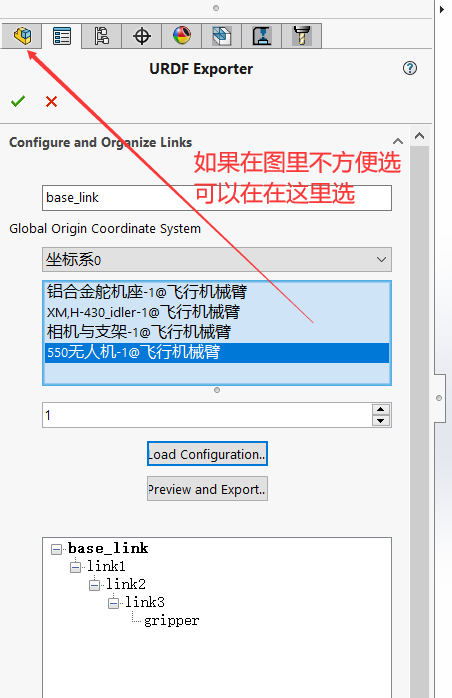
工具 -> tools -> export as urdf”

-
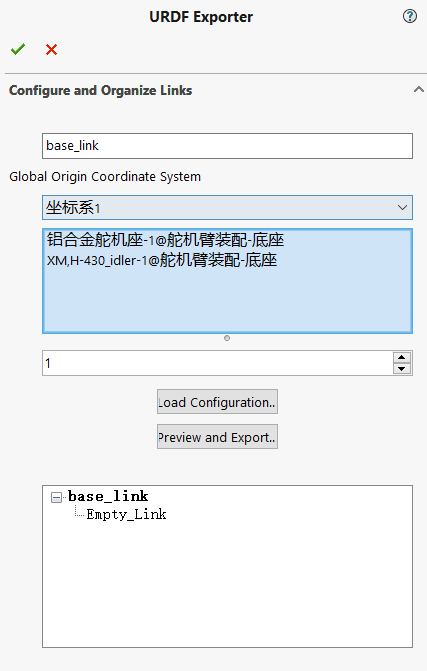
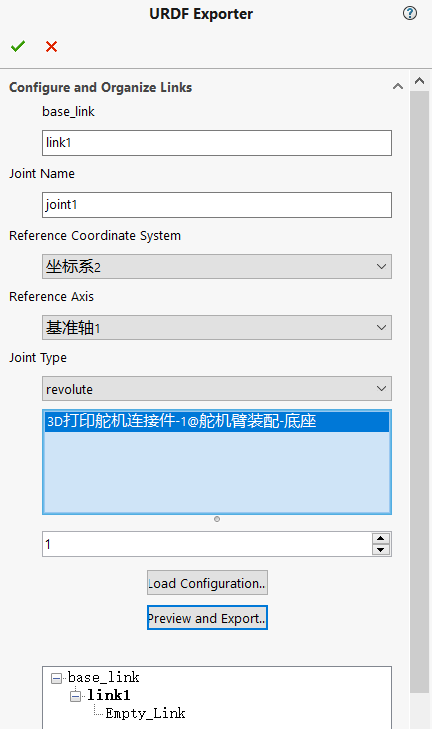
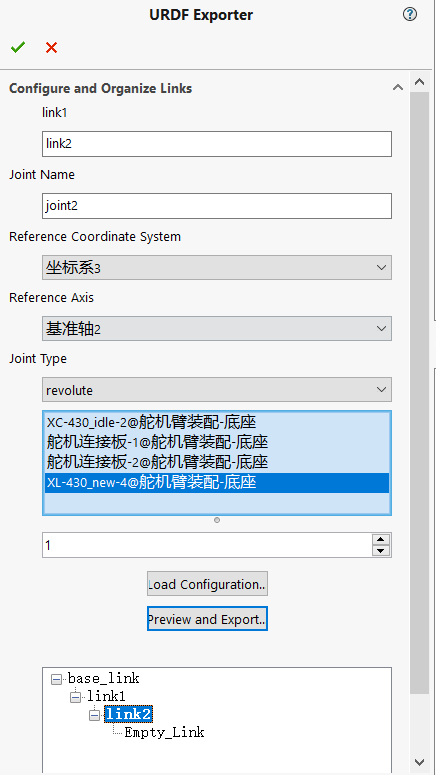
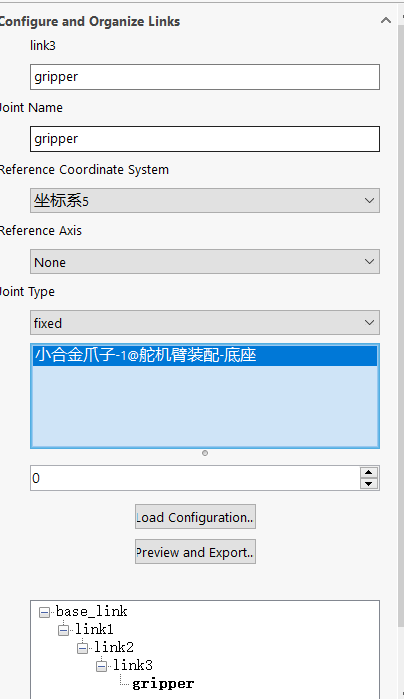
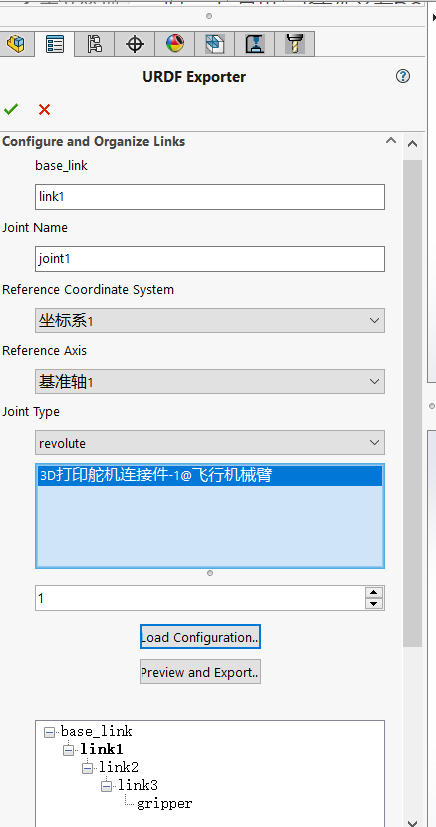
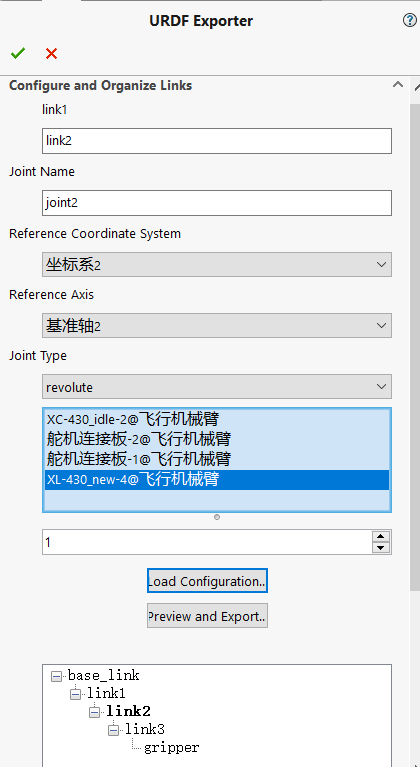
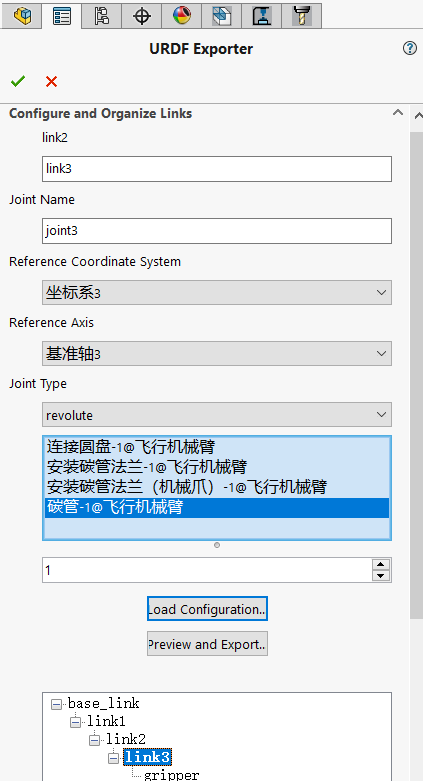
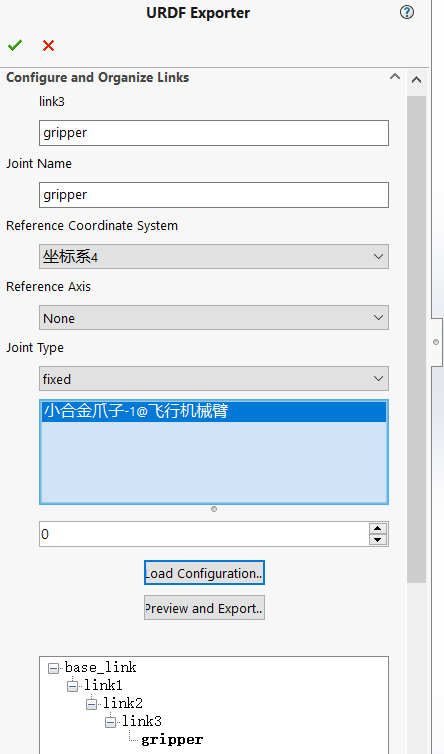
在urdf界面设置坐标系和转轴
在打开的界面上,设置如下操作
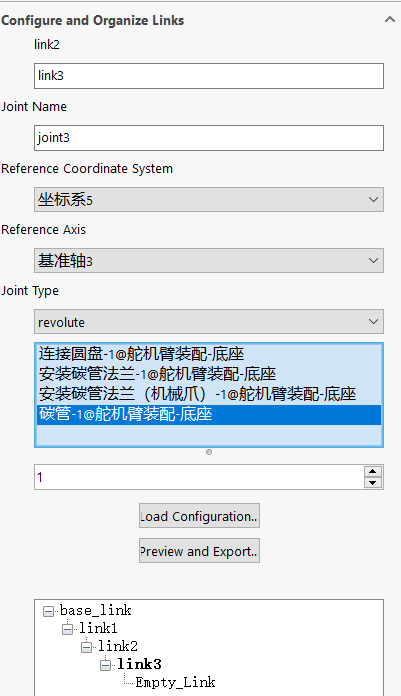
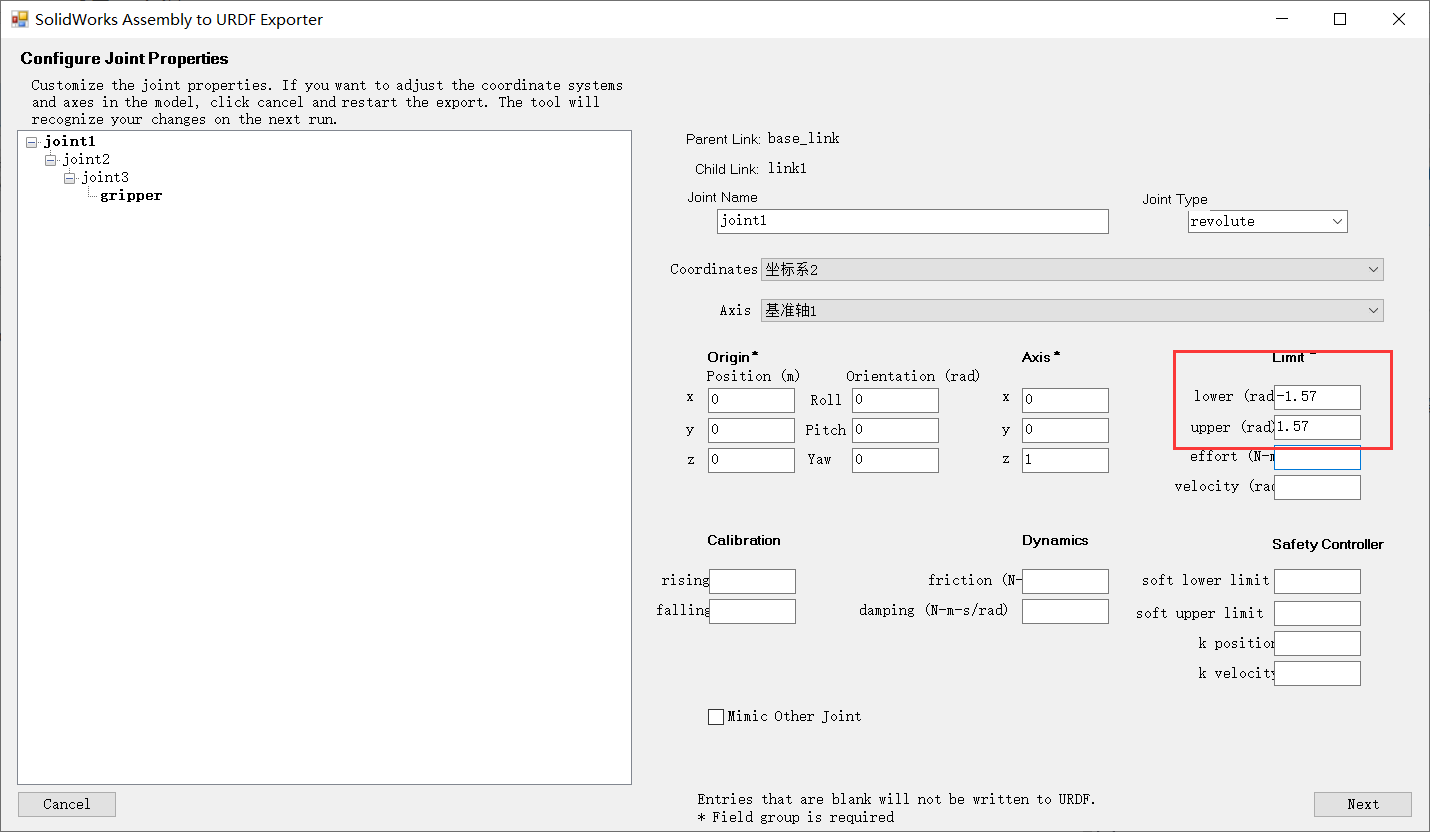
更新:
- 点击“export”输出,可以设置关节限位,并注意是弧度制的。
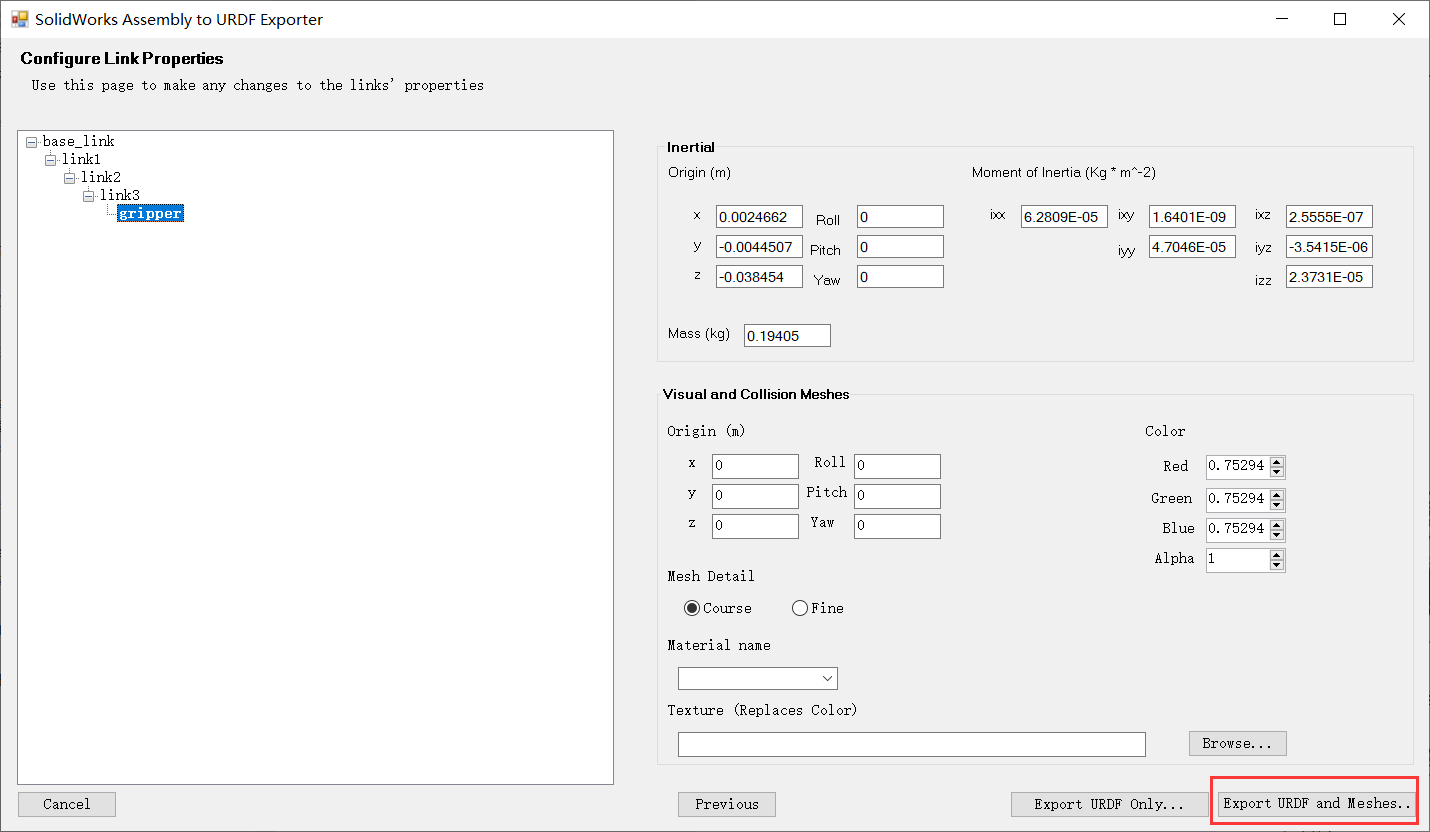
每个关节都设置完毕后,点击“Next”,设置惯性矩阵、颜色等。
每个关节设置完毕后,“Export URDF and Meshes”导出文件,注意保存时不加后缀,名称全部为小写字母

02 在ros中显示机器人模型
将导出的文件夹放到工作空间内
roslaunch am_description dispaly.launch
启动后将打开Rviz界面,刚打开的时候是没有模型的,需要点击“add -> RobotModel” ,然后坐标系选择base_link。

roslaunch am_description dispaly.launch
启动后将打开gazebo界面不知道为什么是躺倒的

更新:
需要在urdf中添加如下语句,就不会躺倒了(但这一步其实暂时不需要做,可以留在后续和moveit的仿真中完成)
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/</robotNamespace>
</plugin>
</gazebo>
03 参考:
- 视频:https://www.bilibili.com/video/BV1QZ4y1a724/
- 【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学:https://zhuanlan.zhihu.com/p/425819351
- SolidWorks导出urdf并在ROS中用Rviz和gazebo显示:https://blog.csdn.net/king845/article/details/125918110


















 3231
3231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









