






| RS-LIDAR-16 | Realsense D455使用的深度相机 | |
| 供应商 | 深圳市速腾聚创科技有限公司 | 英特尔 |
| 原理 | TOF探测法 | 立体视觉 |
| 探测距离 | 0.4-150m | 0.52-6m |
| 精度 | 2cm | <4m时误差<2%(这数据可能是融合了IMU) |
| 视场角 | 360°(水平)/30°(垂直) | 87°(水平)/58°(垂直) |
| 角分辨率 | 0.1°/0.2°/0.4°(水平)/2°(垂直) | |
| 帧率 | 5/10/20Hz | 90Hz |
| 价格 | 26-47k | 3.4k |
| 优点 | 精度高且较稳定,测距范围大,相比视觉受环境影响小 | 成本低,体积小,帧率较高,信息丰富 |
| 缺点 | 成本高,帧率低,信息量有限(无彩色信息、稀疏点云),易受烟雾、灰尘、雨滴的影响,激光雷达运动畸变 | 功耗大,测距范围小,受过度曝光影响,受到深黑色、半透明、镜面反射物体影响,精度和稳定性稍差 |
| 近距离精度降低 | ||
RS-LIDAR-16精度曲线:

Realsence D455:
英特尔实感D400系列深度相机使用立体视觉来计算深度。立体视觉实施由左成像仪、右成像仪和可选的红外投影仪组成。红外投影仪投射不可见的静态红外图案,以提高低纹理场景中的深度精度。左和右成像器捕捉场景并将成像器数据发送到深度成像(视觉)处理器,该处理器通过将左图像上的点与右图像相关联以及通过左图像上的点和右图像之间的移动来计算图像中每个像素的深度值。深度像素值被处理以生成深度帧。后续深度帧创建深度视频流。
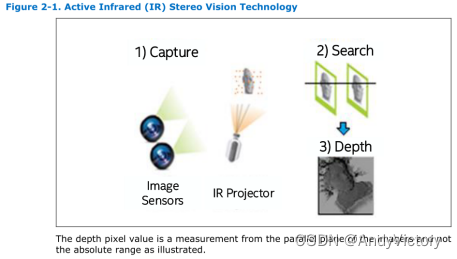
Intel Realsence D400系列,采用经典的双目视觉原理来测量深度。左右两个相机将图像数据送入内置的深度处理器,再基于双目测距的原理计算每个像素的深度值。尽管有红外投射器,但并非采用红外反射器测距。红外投射器的作用仅仅是投射不可见的固定的红外纹理样式(如散斑),提高在纹理不明显的环境中的深度计算精度。

















 2722
2722











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











