







**
轨迹生成函数jtraj():关节角空间规划
**
函数的核心是五次多项式插值。每一个角度的变化轨迹是个5次函数。
[qt,qdt,qddt] = jtraj(q0, q1, tv, qd0, qd1)
一般情况下输入参数:
输入:
q0初始各个关节的角度。
q1最终点的各个关节的角度。
tv:可以理解为时间,也可以理解为步数。
qd0,qd1:起始末端加速度,一般不设,自动置零。
输出:
qt:不同时间内各个关节的角度(输出矩阵的大小为:tv*n(关节个数))
qdt:角速度
qddt:角加速度。
**
轨迹生成函数ctraj():笛卡尔空间规划
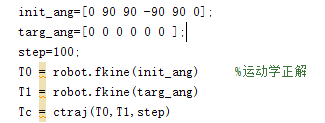
函数的核心是 利用匀加速匀减速规划
tc = ctraj(T0,T1,n);
参数
输入:
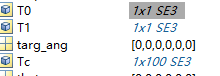
T0(SE3格式):机械臂末端初始位姿矩阵
T1(SE3格式):机械臂末端目标位姿矩阵
n:轨迹控制的点数
输出:
tc(SE3格式):包含n个点的位姿信息
**
逆运动学求解函数ikine
q = ikine(robot, T, q0, M)
输入:
robot:机械臂名字
T:位姿矩阵(SE3类型!???)
输出:
q=关节角信息
正运动学求解函数fkine
q = fkine(robot, Q)
输入:
robot:机械臂名字
T:关节角信息















 6662
6662











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









