






 本文介绍了如何将PID控制函数放入中断以提高实时性,通过上位机调节PID参数,以及针对双电机的特性进行个性化控制。讨论了如何调整PID参数以适应不同电机的控制需求,并在main函数中处理与上位机的通信差异。
本文介绍了如何将PID控制函数放入中断以提高实时性,通过上位机调节PID参数,以及针对双电机的特性进行个性化控制。讨论了如何调整PID参数以适应不同电机的控制需求,并在main函数中处理与上位机的通信差异。
09 调整采样周期和PID调参方法
-
cJSON:{“p”:10,“i”:2,“d”:1,“a”:-2}
-
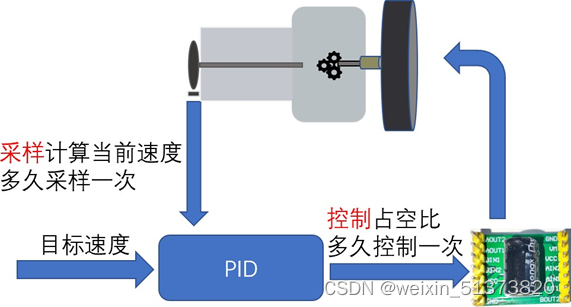
1、简介:正如之前所说,现在我们PID控制函数是在主函数中循环调用,
- 这样的调用方式并不能保证实时性,不能保证周期得到调用
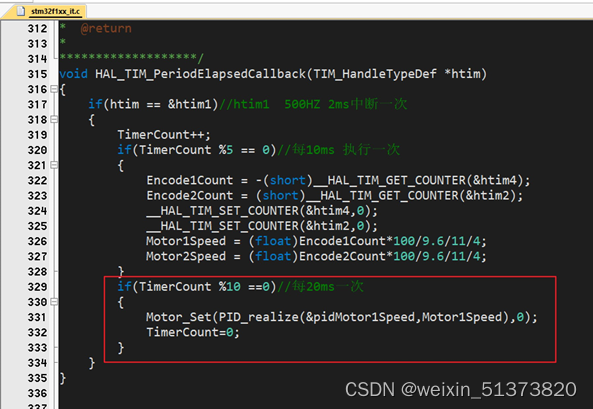
- 所以我们要把PID控制函数放到中断里面定时执行,那么如何放到中断里面执行,
- 执行的周期是多少合适 那?(采样时间》控制时间)
-
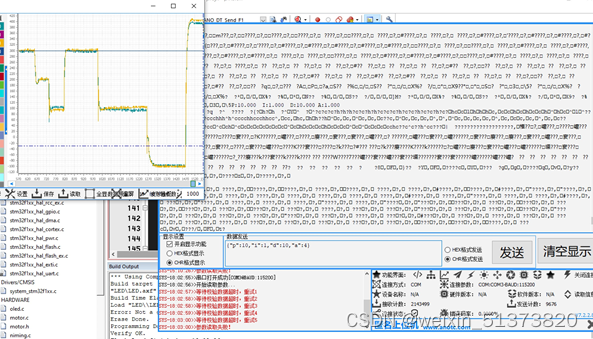
烧录测试一下,是否可以改变波形和调整参数
-
2、借助上位机调节PID
- 调节P 把I=0、D=0先给正值或负值测试P 正负、然后根据PID函数输入和输出估算P 大小,
- 然后I=0 D=0去测试,调节一个较大值
- 调节I 把P等于前面的值 然后测试I给较大正值和负值 测试出I正负,然后I从小值调节,直到没有偏差存在
- 一般系统不使用D
-
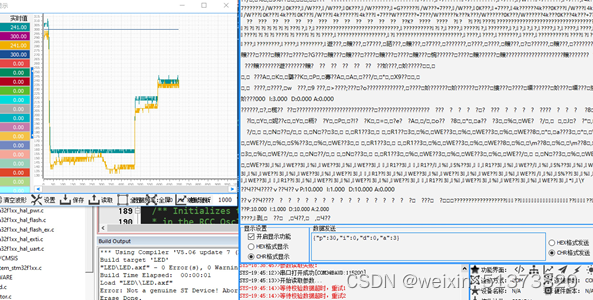
然后当前系统特点 :I 对于系统更重要
-
下面我们调节I
-
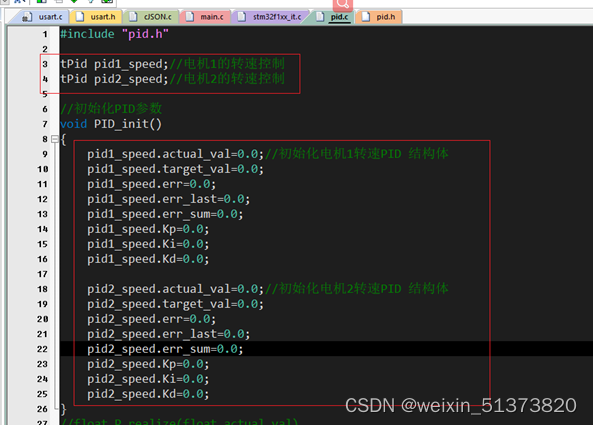
3、整理双电机速度控制
- 首先我们的需要是控制两个电机,那么这两个电机的特点不同,他们的P I D 参数不同,
- 要控制不同的目 标速度,那么他们的目标值、实际值、偏差等都会不同,
- 所以我们的PID函数就要能够根据输入参数控制 电机
- 我们增加tPid 类型函数的定义用于控制电机
-
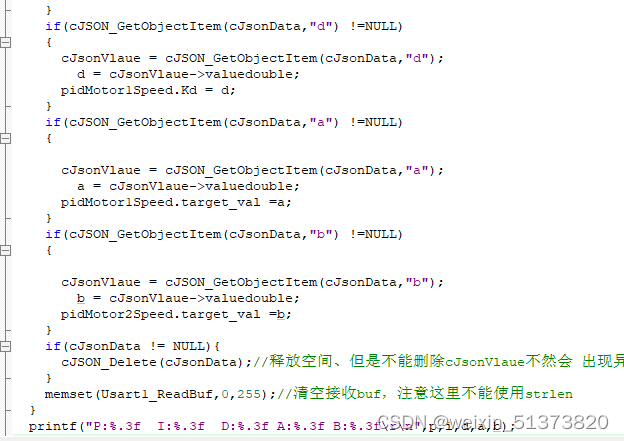
更改一下PID函数,这里我们使用结构体
-
作为函数地址 访问因为是地址,访问结构体变量要用->
-
更改主函数,对PID函数的使用
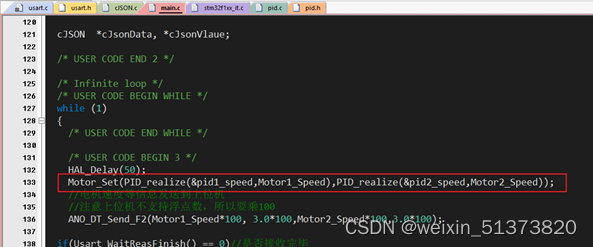
-
然后可以分别调节电机1的参数和电机二的参数
-
把测试好的PID 参数分别写在PID_init里面
-
4、提示
-
在main函数可以改与上位机的通信(如设为P1,P2以区别电机1,2…然后进行控制)

















 238
238

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









