






10 小车运动控制
-
1、如何实现小车的前后左右停
- 控制电机速度就可以控制小车运动——如何控制电机速度?
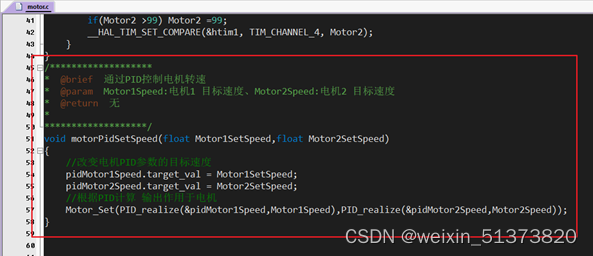
- 改变小车速度PID的目标值,然后定时器里面的PID控制函数就会计算输占空比然后控制小车。
- 定时器里面有电机控制,我们这里还增加Motor_Set(PID_realize(&pidMotor1Speed,Motor1Speed),PID_realize(&pidMotor2Speed,Motor2Spe ed));
- 是为了提高实时性。
- 是为了提高实时性。
-
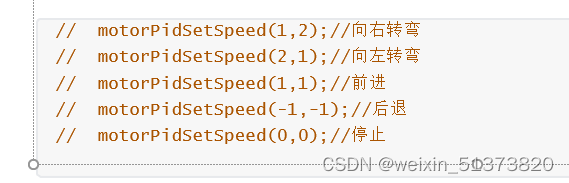
很容易得到一下控制方式
-
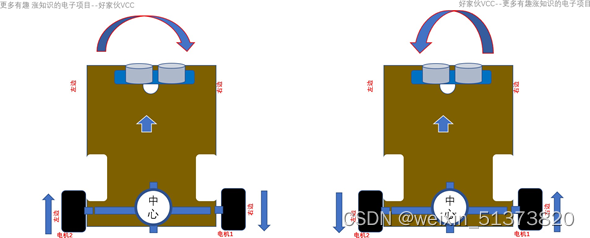
2、向左原地转弯、向原地转弯 (电机2,电机1)
// motorPidSetSpeed(-1,1);//左原地旋转 // motorPidSetSpeed(1,-1);//右原地旋转
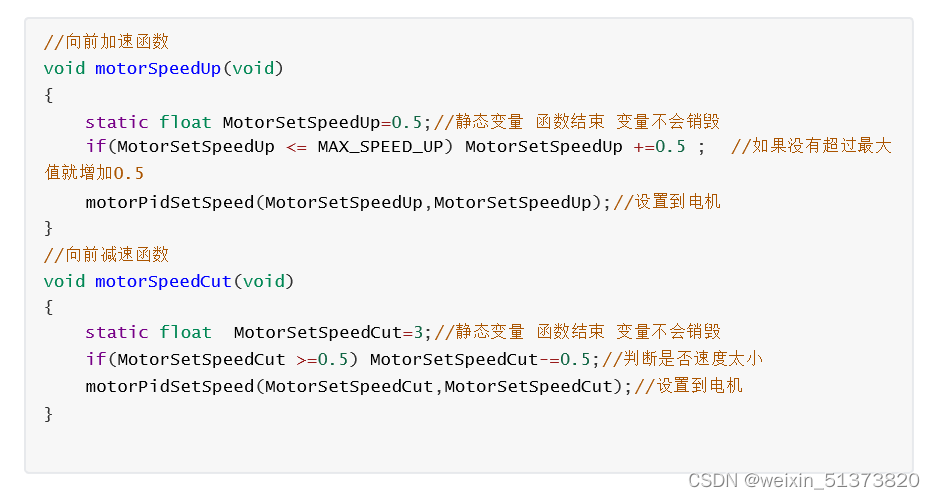
- 3、加速减速函数(motor。c)

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









