







前言
本系列博客,将开启一场主流SLAM匹配算法的学习之旅,将带大家了解及使用SLAM匹配算法。一、ICP的理论
ICP是一种点云匹配算法,用来计算相邻2帧雷达数据间的坐标变换,如图1。
![[外链图片转存失败,源站可能有防盗图片保存下来直1ICP算法的]接上Rhttps://ljbGog.csdnimg.c/3d9dc496ed4d35b01705b8dbd4b1b2656.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_)0,text_Q1NETiBAemhhbmdra(l0,size_圆6,color_FFFFFF,t_70,g_se,x_16#pic_center,括里写自定义目录](https://img-blog.csdnimg.cn/30d19dc496ed4d35b01b8dbd5b1b2696.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAemhhbmdra2l0,size_16,color_FFFFFF,t_70,g_se,x_16]](https://img-blog.csdnimg.cn/06d5a35c34e649c4ac7227da66bc6799.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBAemhhbmdra2l0,size_16,color_FFFFFF,t_70,g_se,x_16#pic_center)
给定两个点云集合:
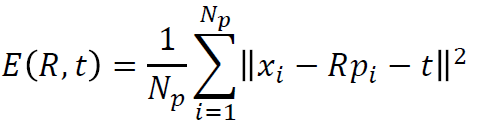
求解R和t,使得下式最小:
求解对应点的求解方法

未知对应点的求解方法
未知对应点特点:实际中,不知道对应点匹配,不能一步到位计算出R和t,可以进行迭代计算,这是EM算法的一个特例。

- 寻找对应点
- 根据对应点,计算R和t
- 对点云进行转换,计算误差
- 不断迭代,直至误差小于某一个值
二、使用ICP计算相邻2帧雷达数据间的坐标变换
1.引入库
代码如下(示例):
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
import warnings
warnings.filterwarnings('ignore')
import ssl
ssl._create_default_https_context = ssl._create_unverified_context
2.读入数据
代码如下(示例):
data = pd.read_csv(
'https://labfile.oss.aliyuncs.com/courses/1283/adult.data.csv')
print(data.head())
该处使用的url网络请求的数据。
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。















 1338
1338











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









