







论文:https://arxiv.org/pdf/2404.04561v1
代码:https://github.com/Rorisis/Co-Occ?tab=readme-ov-file
Q: 这篇论文试图解决什么问题?
A: 这篇论文提出了一个名为Co-Occ的多模态3D语义占据预测框架,旨在解决自动驾驶领域中的3D语义占据预测问题。具体来说,它关注以下几个挑战:
模态异质性:不同传感器(如激光雷达(LiDAR)和摄像头)捕获的数据类型不同,导致数据融合困难。
模态不对齐:由于传感器之间的外部校准不准确,2D图像特征到3D空间的映射可能不精确。
模态交互不足:现有方法在融合不同模态数据时,可能无法充分利用两种模态的互补信息,导致重要的几何和语义信息丢失。
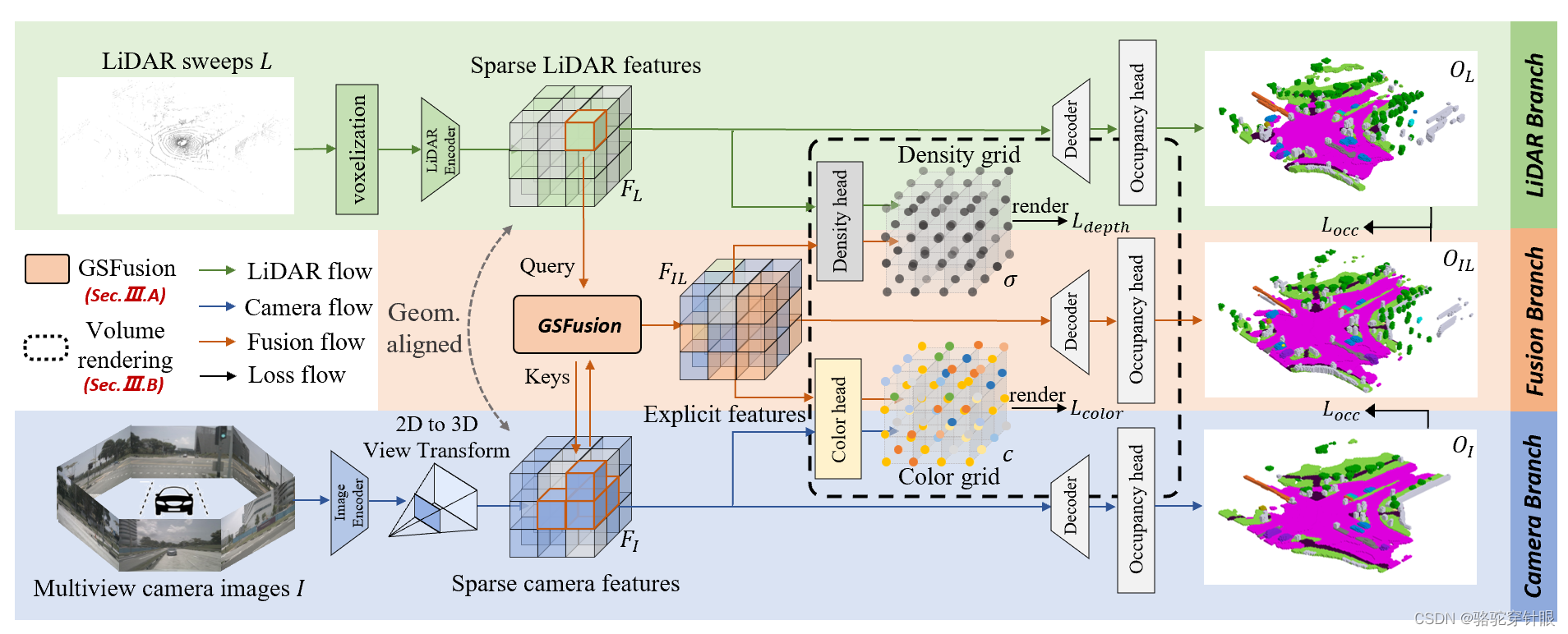
为了解决这些问题,Co-Occ框架结合了显式的LiDAR-摄像头特征融合和隐式的体积渲染正则化。关键思想是在特征空间中通过体积渲染桥接3D LiDAR扫描和2D图像之间的差距,同时作为物理正则化来增强LiDAR-摄像头融合的体积表示。
具体来说,Co-Occ框架包括以下几个关键组件:
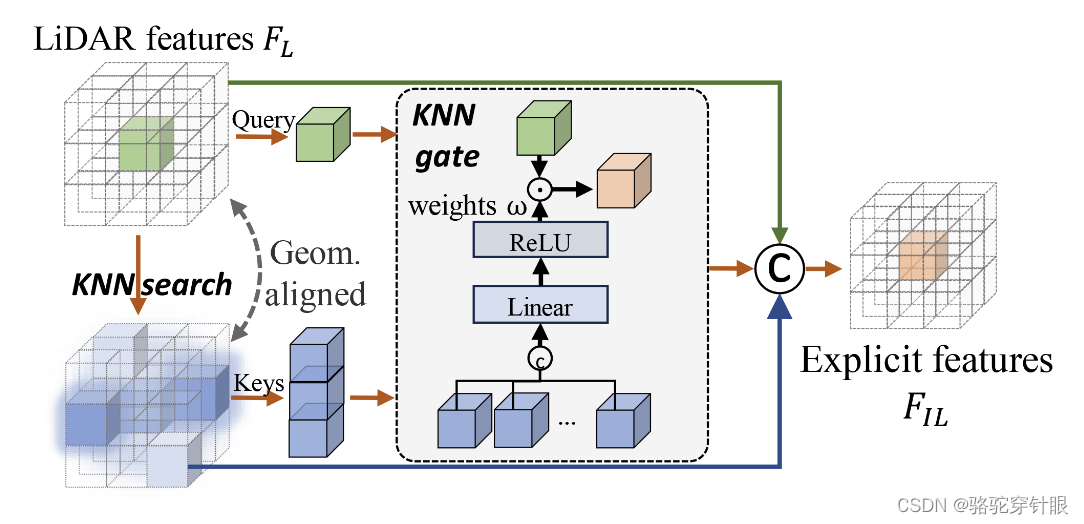
几何和语义感知融合(GSFusion)模块:通过K最近邻(KNN)搜索显式地增强LiDAR特征,并通过KNN门操作选择相关的摄像头特征。
隐式体积渲染正则化:通过从摄像头发射光线并在场景中均匀采样,以及使用辅助头预测样本的密度和颜色,将颜色和深度投影回2D图像平面,并由摄像头输入图像和LiDAR派生深度图进行监督。
Q: 论文如何解决这个问题?
A: 论文提出了一个名为Co-Occ的多模态3D语义占据预测框架,通过以下几个关键组件和步骤来解决上述问题:
几何和语义感知融合(GSFusion)模块:
使用K最近邻(KNN)搜索在几何对齐的体素空间中找到与给定LiDAR坐标相邻的摄像头特征。
通过一个可学习的KNN门操作来获取每个LiDAR特征的语义权重,并将这些权重与LiDAR特征进行融合,以显式地增强LiDAR特征。
def fps_NN_fast(self, query, key, fps_num, radius, max_cluster_samples, dist_thresh, num):
"""Efficient NN search for huge amounts of query and key (suppose queries are redundant)
Behavior:
1. apply FPS on query and generate representative queries (repr_query)
2. calculate repr_queries' distances with all keys, and get the NN key
3. apply ball query to assign the same NN key with the group center
"""
# 根据 num 初始化 query_NN_key_idx
if num == 1:
query_NN_key_idx = torch.zeros_like(query[:, 0]).long() - 1
else:
query_NN_key_idx = (torch.zeros_like(query[:, 0]).long() - 1).repeat(num, 1)
# 移除第一列并增加维度
query = query[:, 1:].unsqueeze(0)
key = key[:, 1:].unsqueeze(0)
if num == 1:
# 如果查询点数小于等于 fps_num
if query.shape[1] <= fps_num:
dist = torch.norm(query.float().unsqueeze(2) - key.float().unsqueeze(1), p=2, dim=-1)
val, NN_key_idx = dist.squeeze(0).min(-1)
valid_mask = val < dist_thresh
query_NN_key_idx[valid_mask] = NN_key_idx[valid_mask]
return query_NN_key_idx
else:
# 使用FPS生成代表性查询
repr_query_idx = furthest_point_sample(query.float().contiguous(), fps_num)
repr_query = query[:, repr_query_idx[0].long(), :]
dist = torch.norm(repr_query.float().unsqueeze(2) - key.float().unsqueeze(1), p=2, dim=-1)
val, NN_key_idx = dist.squeeze(0).min(-1)
valid_mask = val < dist_thresh
# 使用球查询分配相同的最近邻键
query_group_idx = ball_query(0, radius, max_cluster_ 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 149
149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









