







GPIO
ZYNQ 的 IO口用于和外部设备通信,包括对外连接的 GPIO
和内部
PS
与
PL
通信的
AXIO
。
GPIO 又分为 两种:
MIO 和 EMIO。MIO 和 EMIO 只是 GPIO 信号的两种接口,MIO 直连到PS,EMIO 则是 PS 扩展到 PL,从 PL 接出的 I/O。
EMIO 依然属于
PS,只是连 接到了
PL
,再从
PL
输出信号。所以
MIO
不需要管脚约束,而
EMIO 需要管脚 约束。
当 GPIO
用作输出时,一般用于控制一些简单的外设,如
LED
、按键、蜂鸣器
GPIO的信号路由
信号不能被分割 并路由到不同的
MIO
引脚组。例如,如果
SPI_0_CLK
路由到
MIO
引脚
40
,那
么
SPI_0
接口的其他信号必须路由到
MIO
引脚 41 ~ 45。同样,信号不能在 MIO 和 EMIO 之间分割。
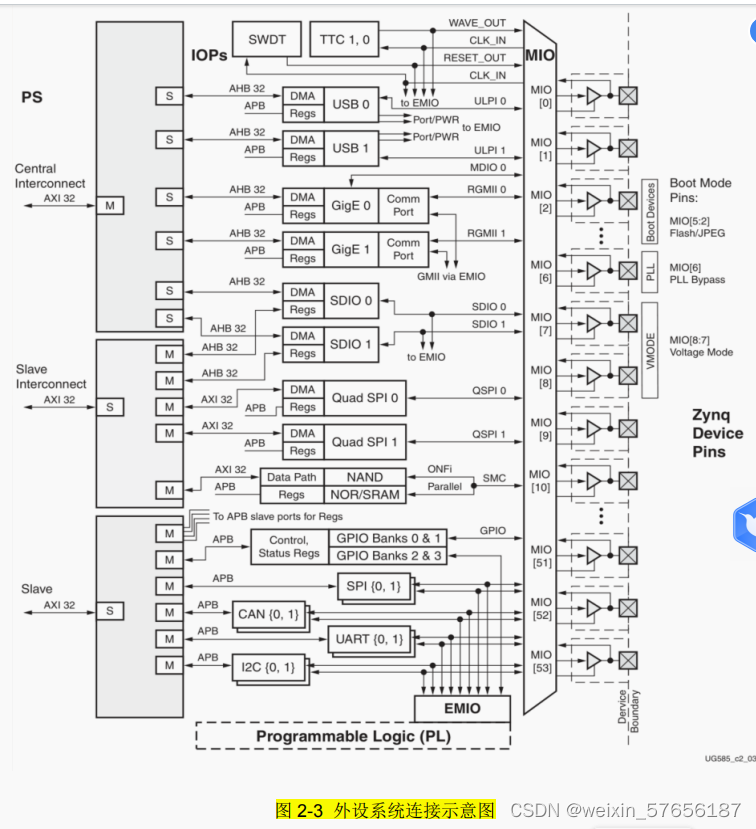
如上图所示:
软件通过 AHB
互连接入只有从机功能的
Quad-SPI
和
SMC 外设。 GPIO
、
SPI
、
CAN
、
UART
和
I2C
只存控制器通过
APB
总线访问。
通过
APB 总 线可以访问
GPIO
、
SPI
、
CAN
、
UART
和
I2C
控制器。

PS和PL联合工程的涉及步骤
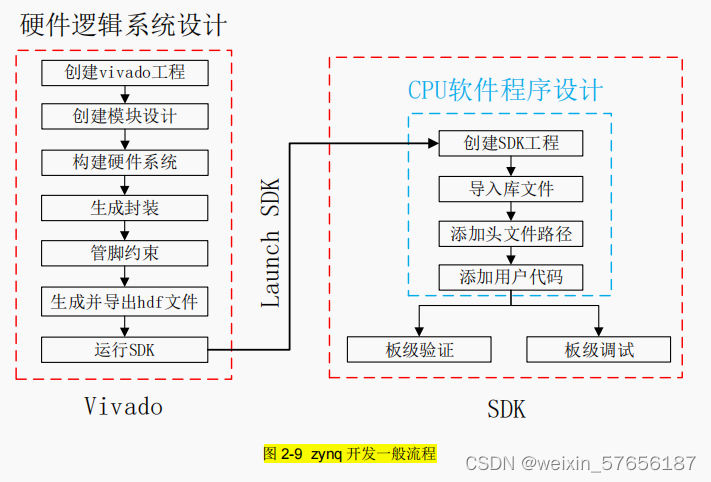
新建vivado工程;
创建BD文件;
构建硬件系统
【加入zynq的IP,并对ZYNQ进行配置(必须对外设和DDR进行配置,不管有没有用到);
加入其他用到的IP核;完成IP核之间的相互连接;
保存,验证设计;】;
生成封装【“Generate Output Products...”生成输出;“Create HDL Wrapper...”创建 HDL 封装】
引脚约束;
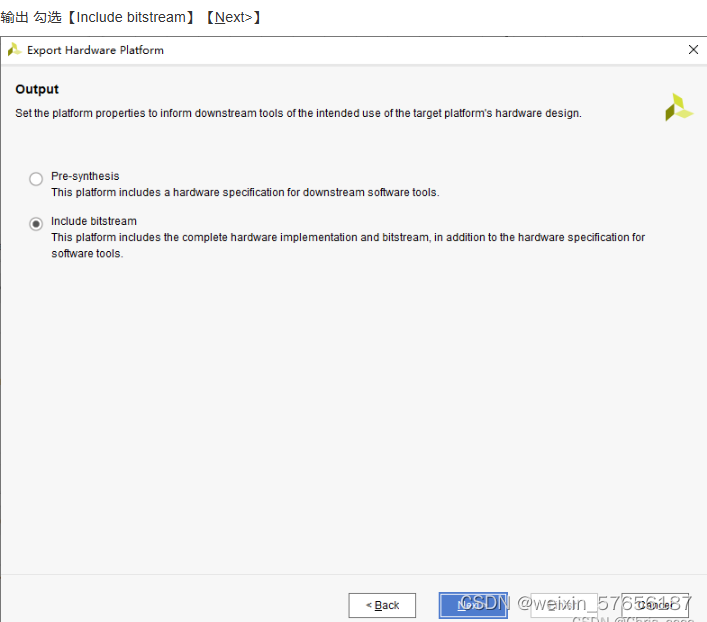
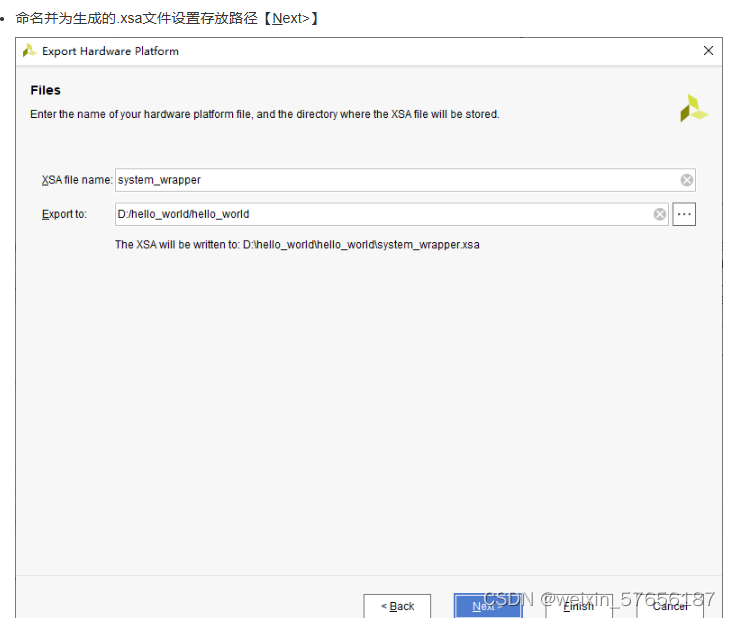
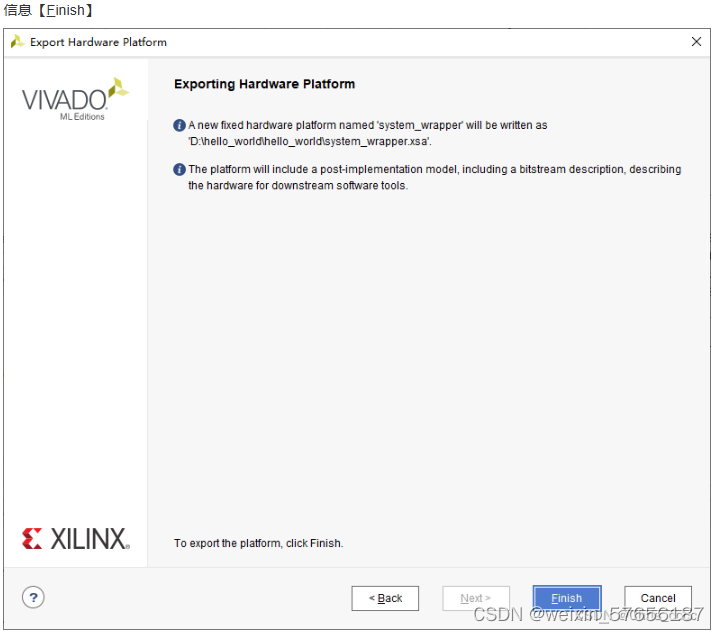
生成BIT流,file-->Export -->选择“ExportHardware...”将硬件描述文件(HDF文件)导出;
若是使用vivado2018版本,使用步骤就和教程中完全一致。
file-->latch SDK,启动SDK;
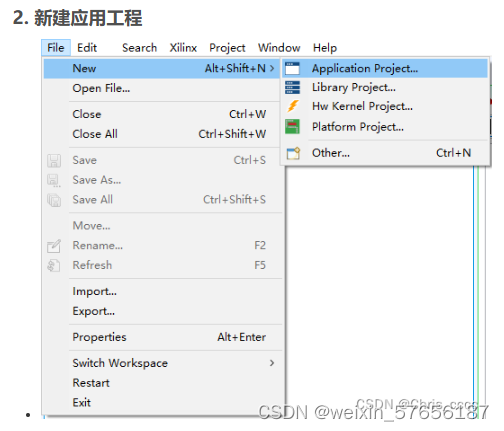
创建SDK工程;
添加应用库即对应的LIB文件夹;
添加头文件路径和声明;
编写main.c文件;
添加用户宏定义【就是把main.c函数中用到的所有变量和GPIO的端口号对应一下,这样主函数中对变量的操作就是对端口的操作】;

上板验证和调试。
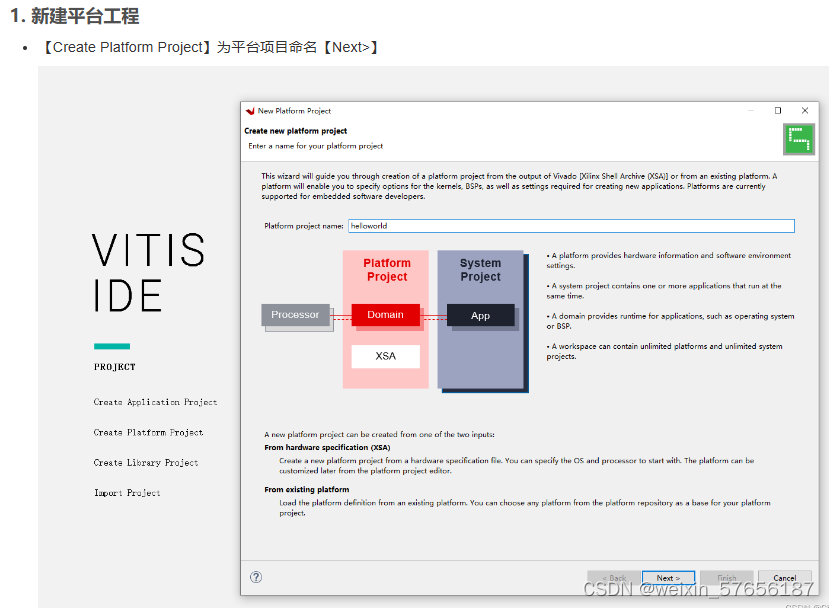
viviado的2020版本所以执行如下操作:

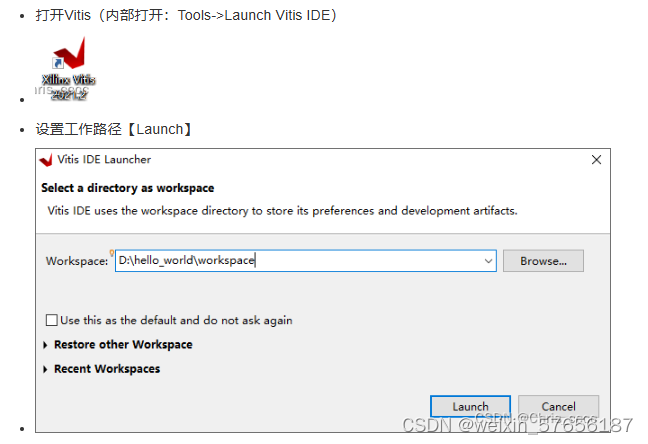
手动打开vitis,或者在vivado的内部用tool-->latch vitis ide打开;
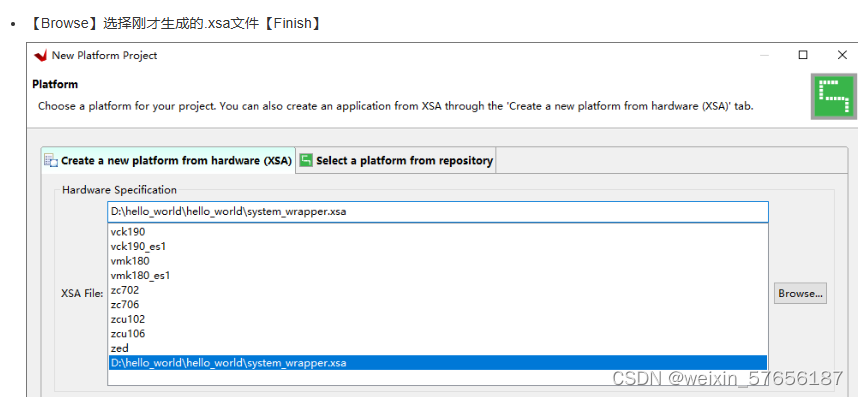
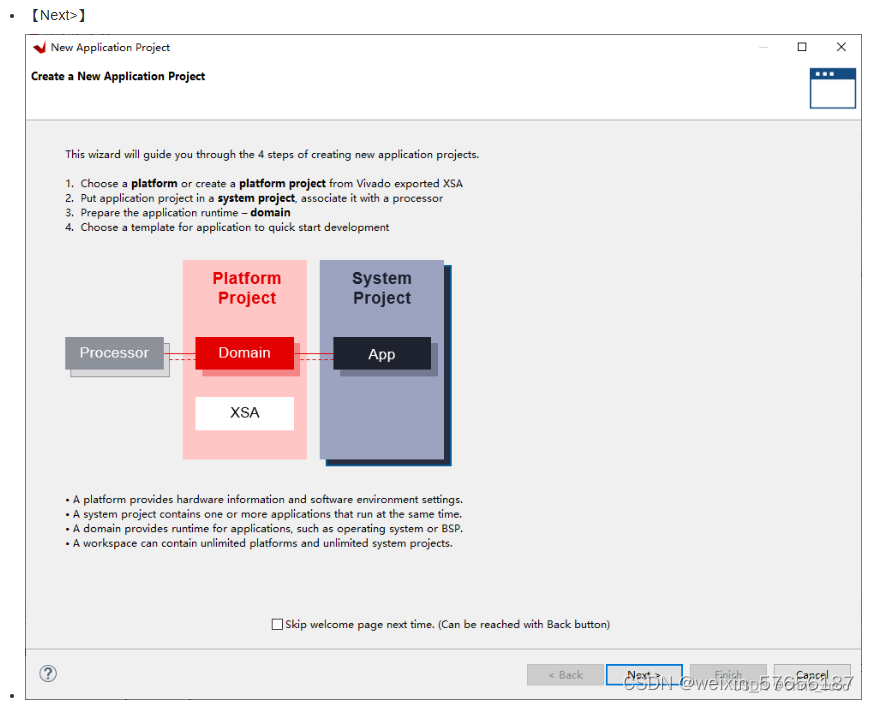
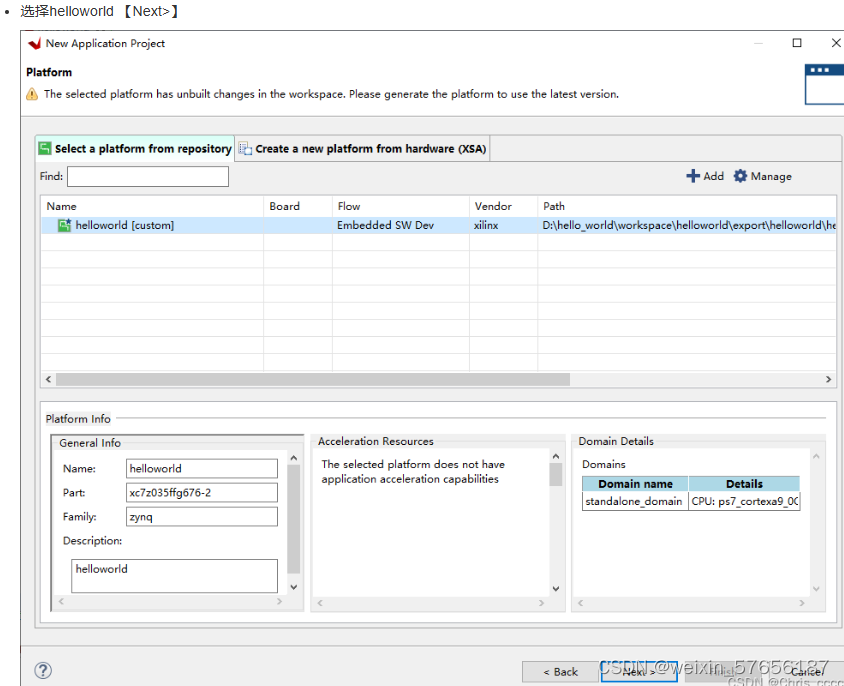
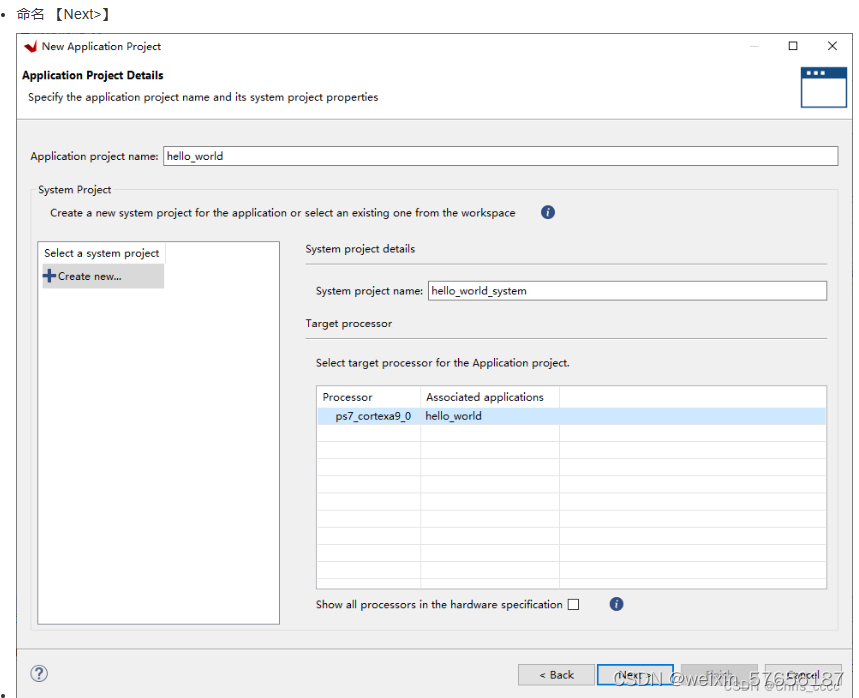
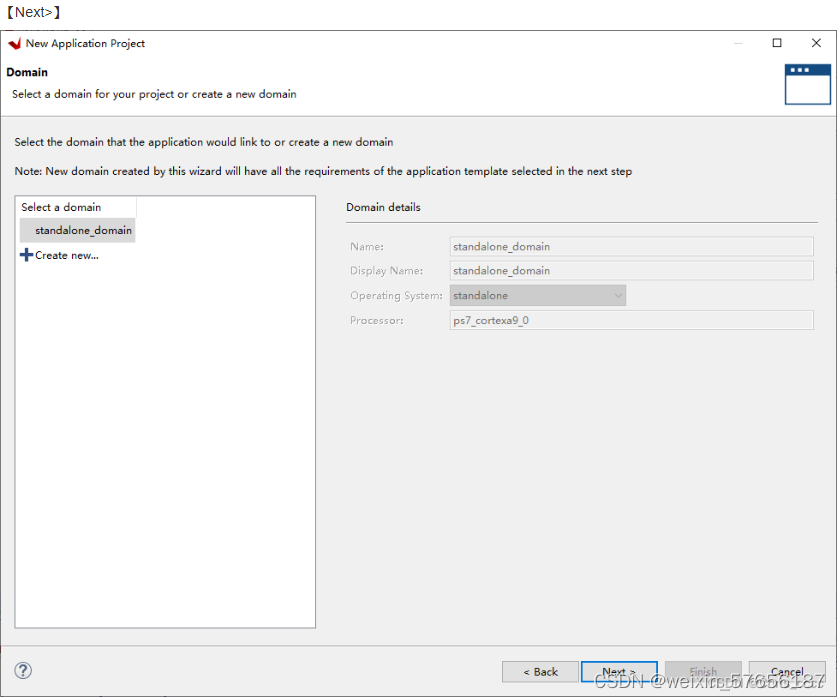
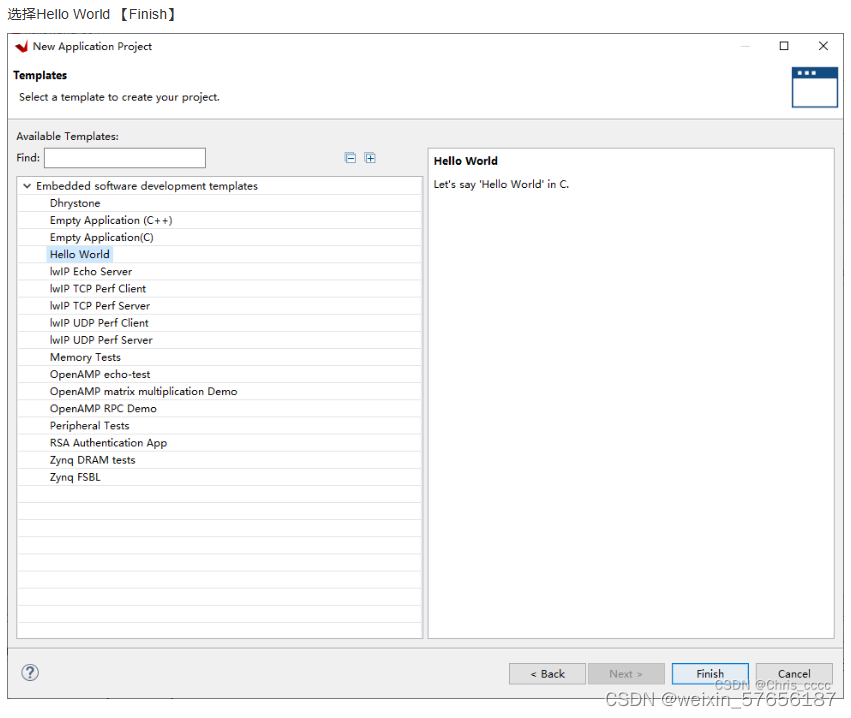
下面这里是选择生成的工程中自带的例程,这里可以选择一个空的例程。(C)表示用C写的;
添加应用库即对应的LIB文件夹;
添加头文件路径和声明;
编写main.c文件;
添加用户宏定义【就是把main.c函数中用到的所有变量和GPIO的端口号对应一下,这样主函数中对变量的操作就是对端口的操作】;
上板验证和调试。
项目中的main.c文件怎么写?
写main.c文件本质上和写嵌入式的编码没有什么区别。
关于GPIO的一些系统函数在gpiops: xgpiops.c File Reference (xilinx.github.io)有详细介绍。
xgpiops.c只要是对GPIO进读写;xgpiops.h是.c文件的头文件;
通过上述的系统函数,可以实现对GPIO的初始化,读,写等操作。

















 514
514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









