







欧几里得变换也称为欧式变换、刚性变换,是一种较为基本的变换,通过欧几里得变换,可以改变物体的空间位置,却不改变物体的形状、大小。欧几里得变换包括旋转变换(Rotation transformation)与平移变换(Translation transformation)。至于反射变换(Reflection transformation),是比较有争议的,因为它是通过镜面对称(或平面中的轴对称)或点中心对称变换物体,所以有时认为它不属于欧氏变换,但是有时也认为是欧式变换。在本篇文章,兔兔为了将知识点讲述全面,将反射变换归到欧式变换中,并详细讲述旋转、平移与反射变换。
在关于欧式变换的文章中,有些着重讲述欧式变换群——这部分知识属于近世代数的群论部分知识,很少提到具体的操作过程,更多的侧重于抽象的理论。而在本篇文章中,着重讲述变换操作过程与算法实现,推导过程稍作介绍,不作重点,变换群的相关内容放到其它文章中讲解(这一部分与量子力学、量子化学或结构化学等内容相关)。
在变换操作中,一般分为对坐标系的变换以及对坐标系中物体的变换,事实上这两种变换本质上是相同的,如在直角坐标系下物体向某个方向平移一段距离,等价于坐标系向相反方向平移相同距离;物体绕某个轴沿某一方向旋转θ角,等价于坐标轴沿该轴向相反方向旋转θ角。所以,在本篇文章中,兔兔着重讲述对坐标系中物体的变换。
背景知识
1:坐标系
关于欧式变换,本文对平移、旋转与反射三种变换分别讲解。每种变换都先从二维平面空间开始,并拓展到三维空间。在每个空间内主要讲解对点的变换操作,因为对线、面、体的变换,与对点的变换有很大的关联(线、面、体由点组成)。并且所有操作都是在平面直角坐标系或空间直角坐标系(右手坐标系)下进行,点的表示分别采用笛卡尔坐标与齐次坐标。
(1)笛卡尔坐标(Cartesian coordinate)
笛卡尔坐标系是我们接触最多的一种坐标系,例如平面直角坐标系、空间直角坐标系等常见的直角坐标系,也包括斜坐标系。在该坐标系下,点可以由一个二维或三维的列向量来表示,如平面中原点,空间中的某一点
等。
(2)齐次坐标(Homogeneous coordinate)
齐次坐标是本文研究变换的一个重点,运用齐次坐标,可以很方便地完成对物体的变换。简单来讲,一个点的齐次坐标就是它的笛卡尔坐标后加上1,如平面中原点的齐次坐标为,空间中某一点的齐次坐标为
。
利用齐次坐标具有诸多优点。例如,判断点是否在直线上,只需要判断
是否为0即可,这时平面直线可以用向量
来表示,空间平面可以用向量
表示,点是否在直线或平面上,只需判断两个向量的内积是否为0即可。
从上面例子中,我们发现,一个直线或平面的方程是不唯一的,上面的直线方程可以写成,也就是说,点的齐次坐标是可以表示成
,即该点有无数种表示方法,如果归一化处理,每个值都除以k,就变成了
,也就是前面讲到的齐次坐标的表示方法。如果齐次坐标中最后一个数是0而不是1,该点即表示为无穷远点。
2:变换的表示方法。
在本篇文章中,对于笛卡尔坐标,变换操作即为变换向量/矩阵作用于一个点的笛卡尔坐标(向量),一般为矩阵与向量的相乘或向量之间的相加;对于齐次坐标,即为变换矩阵T作用于一个点的的齐次坐标,运算都是矩阵相乘。本文旋转矩阵用R表示,平移向量由t表示,反射矩阵由S表示,点由向量表示,变换矩阵由T表示。对物体的变换由相应的算子表示,如对点
的旋转操作可以表示成
,变换操作表示成
。
一:平移变换
(1)原理
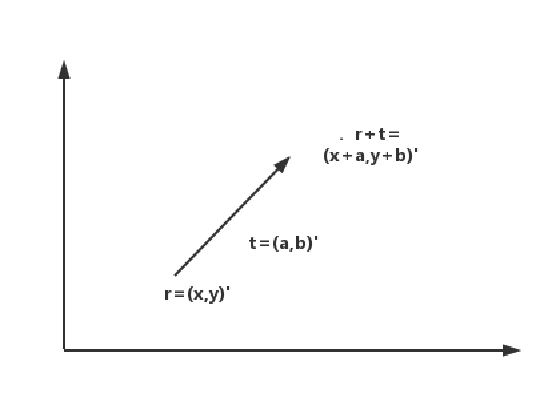
平移变换也是最为简单的一种变换。以平面中点的平移为例:设平移向量,一个点的原坐标为
,则平移后的点
表示为点r延向量t方向平移t的模长距离后的点。对于三维空间的点也是如此。
如果采用齐次坐标表示r,那么平移变换就可以表示成:
其中为单位阵,t为平移向量,o为全0且维数为2的列向量。对于空间平移变换,单位阵为3×3维,向量t与o也都是三维列向量,变换矩阵为4×4矩阵。
(2)算法实现
import numpy as np
def translation(t,r):
'''三维空间平移操作,t:平移的方向与距离,r:初始点齐次坐标'''
T=np.mat([[1,0,0,t[0,0]],
[0,1,0,t[1,0]],
[0,0,1,t[2,0]],
[0,0,0,1]])
r=np.dot(T,r)
return r
r0=np.mat([0,0,0]).T #初始点
t=np.mat([1,2,3]).T #平移向量
r1=translation(t,r0) #平移后点的齐次坐标
print(r1)最终结果的齐次坐标,如果去除最后一个1,即得到笛卡尔坐标。
二:旋转变换
(1)原理
旋转变换与平移变换相比更为复杂一些,它需要确定旋转轴与旋转角度θ,我们通常认为绕轴逆时针旋转θ为正,逆时针旋转为负。物体在二维平面中的旋转,旋转轴是不能在平面内或与平面斜交(此时旋转物体会脱离平面,就变成了三维空间绕轴旋转),而是垂直于该平面的,所以在平面中看,是物体绕着一个点的旋转。我们先以平面一点绕坐标原点顺时针转θ角(坐标绕原点逆时针转θ)为例,推导过程如下。
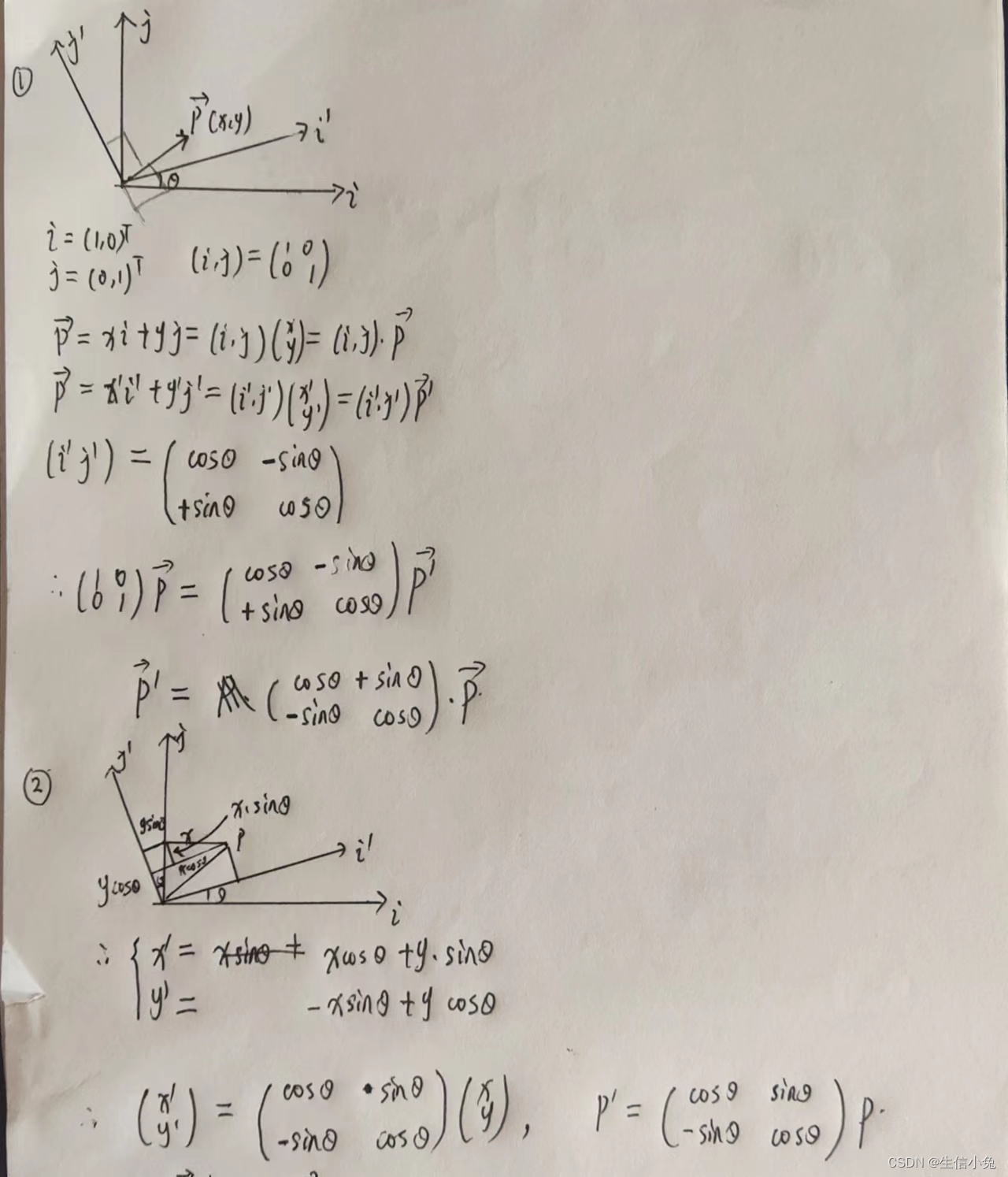
上面采用两种方法来推导,第一种是根据向量在各个坐标系下不变,第二种为几何法。对于第一种方法,p表示坐标点在原坐标系下的坐标,p'表示在旋转后坐标系下的坐标,i,j为原坐标系的基矢,i',j'为旋转后的坐标系的基矢,并且i‘,j'可以表示成i,j分别在i',j'上的投影。如果是逆时针旋转,把θ取相反符号即可。在实际应用中,我们都以物体逆时针旋转角度为正。
在这里,我们不难发现,旋转矩阵是正交矩阵,即。对点的旋转操作,为旋转矩阵左乘该点向量,如果旋转坐标轴,为旋转矩阵右乘原坐标系的基矢(i.j)。对物体的旋转等价于对坐标轴沿相反方向的旋转。
若平面中点p绕任意点o(a,b)旋转,推导过程与上面类似,但是较为复杂。比较好的方法是:把点p先沿平移,再绕原点旋转,最后再沿
平移,这个过程涉及三步操作,可以由平移、旋转、平移这三个变换矩阵T依次相乘,得到的变换矩阵即为点p绕o点旋转的变换矩阵。
平面中关于原点旋转的旋转矩阵
表示点p绕原点逆时针旋转θ角操作,若平面中的点r用笛卡尔坐标表示,则R.r表示旋转后得到的点的笛卡尔坐标。
平面中的点用齐次坐标表示,旋转变换可以表示成:
其中的R即为前面的旋转矩阵,T为变换矩阵。
在三维空间直角坐标系中,物体绕x轴、y轴与z轴逆时针旋转θ角的旋转矩阵分别为:
如果是物体绕通过原点的任意轴旋转,可以看成分别绕x、y或z轴若干角度得到的。(相继绕两个轴转θ1、θ2角度,等价于绕垂直于这两个轴的轴旋转2θ1+2θ2角度)。这样计算起来比较麻烦,兔兔在下面给出物体绕通过原点的任意轴旋转的旋转矩阵公式。
其中v为单位向量,表示轴的方向,θ为旋转角度。
(2)算法实现
兔兔以平面中一点绕原点旋转为例,为了方便,直接采用旋转矩阵乘以向量的方法来进行变换。
import numpy as np
from numpy import sin,cos,pi
import matplotlib.pyplot as plt
def rotation(theta,r):
theta=theta*pi/180 #角度转弧度制
R=np.mat([[cos(theta),-sin(theta)],
[sin(theta),cos(theta)]])
r=np.dot(R,r)
return np.array(r).flatten()
a=[3,0] #初始点
plt.figure(figsize=(6,6))
for i in range(72):
b=rotation(5,a) #每次旋转5°角
a=b
plt.xlim([-5,5])
plt.ylim([-5,5])
plt.scatter(a[0],a[1])
plt.pause(0.1)最终的运行结果如下所示。
三:反射变换
反射变换与前两种变换有着本质的区别——对于一个物体,旋转与平移只是改变其空间位置,而反射变换可能会改变物体的手性,例如有机化学中的手性分子,通过反射变换后,前后两个物体就无法重合了。但是对于点,则不会出现这种情况。
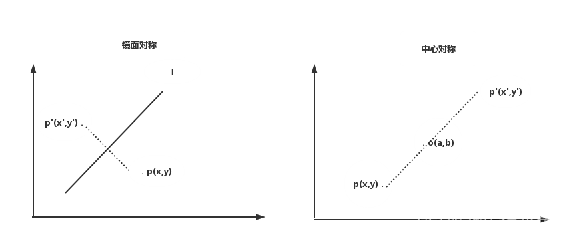
反射变换实质上是一种对称操作,并且分为两类:镜面对称(即反映操作)与点中心对称(即反演操作)。关于镜面对称:在二维平面中,是物体关于某一条直线对称;在三维空间中,是物体关于某一平面对称,该变换即把物体关于某平面某直线或空间某平面对称,得到新的物体位置。关于点中心对称,即物体上所有点关于某一中心点对称。
(1)镜面对称(反映操作)
对于平面内的点p,笛卡尔坐标表示为(a,b),它关于x轴对称得到的点为p'(a,-b),那么此时可以表示成:
对于平面中的任意对称轴a'x+b'y+c=0,关于该轴对称操作的反射矩阵为:
其中a,b,c分别为:,
。
同理,对于空间中的平面a‘x+b’y+c‘z+d’=0,关于该平面对称操作的反射矩阵为:
其中a,b,c,d分别为:,
利用上述公式,只需要反射矩阵左乘某点的齐次坐标,就可以得到对称操作后的点的齐次坐标。
(2)点中心对称(反演操作)
点中心对称相对较为简单,利用初始点与对称点的中点在对称中心这一结论即可推导。
对于平面中 的一点o(a,b),关于该点中心对称的反射矩阵为:
对于空间中的一点o(a,b,c),关于该点中心对称的反射矩阵为:
利用上述公式,只需反射矩阵左乘某点的齐次坐标,就可以得到变换后的点的齐次坐标。
四:组合操作
对于变换操作,旋转和平移的组合操作可以写成变换矩阵:
如果是二维空间内的变换,旋转矩阵R为2×2维,平移向量t,全0向量o为2维列向量,T为3×3矩阵;如果是三维空间内的变换,则R为3×3矩阵,平移向量t,全0向量o为3维列向量,T为4×4矩阵。而对于反射变换,是比较特殊的,虽然难以拆分成关于R,t , o,1分块矩阵的形式,但是其结构与前者还是有很多相同的地方。使用变换矩阵时物体坐标需要用齐次坐标。
旋转矩阵公式中给出的是绕通过原点任意轴的情况,如果绕不通过原点的轴旋转,只需先进行平移,平移方向为使得对称轴通过原点的移动方向,即原点到对称轴的垂线的垂足形成的的向量的反方向,再旋转θ角度,最后沿着该向量平移即可。求解平移向量,可以根据对称轴的方向向量(a,b,c)写出与该向量垂直且通过原点的平面σ方程:ax+by+cz=0,把对称轴直线方程用参数方程形式表示,联立求解得到垂足,进而得到平移向量。
对于空间中物体的连续操作,总变换矩阵即为各个变换矩阵的连续相乘,即T1.T2....。对于点的变换,只需要变换矩阵左乘该点的齐次坐标即可。
关于平面曲线、空间曲面的欧式变换,我们可以用参数方程来表示曲线或曲面方程,把参数方程写成齐次坐标形式,变换后得到的参数方程即为变换后的参数方程。
如果T是单位阵,可以看成旋转角为0(即不旋转),平移向量为0,也就是恒等操作,物体与原来位置相同。
五:总算法实现
在实际问题中,对三维空间物体的变换更为常见,所以兔兔在下面算法中以三维空间欧式变换为例。
import numpy as np
from numpy import sin,cos,pi
class Euclidean_transformation:
def __init__(self,r):
r.append(1)
self.r=np.array(r) #初始点的齐次坐标
def rotation(self,theta,v,p=True):
'''旋转操作
v:旋转轴方向矢量
theta:逆时针旋转角度
p:对称轴是否通过原点,默认通过原点,若不通过原点,p为对称轴所通过的某一点'''
x,y,z=v
n=np.sqrt(x**2+y**2+z**2)
x,y,z=x/n,y/n,z/n #把方向向量转换成单位方向向量
theta=theta*pi/180 #弧度制转成角度制
R=np.mat([[cos(theta)+(1-cos(theta))*x**2,(1-cos(theta))*x*y-sin(theta)*z,(1-cos(theta))*x*z+sin(theta)*y,0],
[(1-cos(theta))*y*x+sin(theta)*z,cos(theta)+(1-cos(theta))*y**2,(1-cos(theta))*y*z-sin(theta)*x,0],
[(1-cos(theta))*z*x-sin(theta)*y,(1-cos(theta))*z*y+sin(theta)*x,cos(theta)+(1-cos(theta))*z**2,0],
[0,0,0,1]])
if p==True:
r = np.dot(R, self.r)
return np.array(r).flatten()[0:3]
else:
a=-(x*p[0]+y*p[1]+z*p[2])/(np.sqrt(x**2+y**2+z**2))
t=np.array([p[0]+x*a,p[1]+y*a,p[2]+z*a]) #原点到对称轴垂线垂足的向量
self.translation(-t) #平移
self.r=np.dot(R,np.mat(self.r).T) #旋转
self.translation(t) #平移
def translation(self,t):
'''平移操作
t:平移矩阵'''
t=np.mat(t).T
R=np.mat([[1,0,0,t[0,0]],
[0,1,0,t[1,0]],
[0,0,1,t[2,0]],
[0,0,0,1]])
r=np.dot(R,self.r)
self.r=np.array(r).flatten()
def mirror(self,*sigma):
'''反射变换中的镜像对称
sigma:平面方程中系数a,b,c,d'''
a,b,c,d=sigma
n=np.sqrt(a**2+b**2+c**2)
a,b,c,d=a/n,b/n,c/n,d/n
R=np.mat([[1-2*a**2,-2*a*b,-2*a*c,-2*a*d],
[-2*a*b,1-2*b**2,-2*b*c,-2*b*d],
[-2*a*c,-2*b*c,1-2*c**2,-2*c*d],
[0,0,0,1]])
r=np.dot(R,self.r)
self.r=np.array(r).flatten()
def central(self,*o):
'''反射变换中的中心对称
o:对称中心坐标'''
a,b,c=o
R=np.mat([[-1,0,0,2*a],
[0,-1,0,2*b],
[0,0,-1,2*c],
[0,0,0,1]])
r=np.dot(R,self.r)
self.r=np.array(r).flatten()
if __name__=='__main__':
b=[0,0,0] #初始点坐标
a=Euclidean_transformation(b)
a.translation(t=[1,1,1]) #平移
a.rotation(theta=180,v=[0,0,1],p=[0,1,0]) #旋转
a.mirror(1,2,3,3) #镜像对称
a.central(0,1,1) #中心对称
print(a.r)总结
在本篇文章中,兔兔着重讲述了旋转、平移与反射三种变换,其中反射变换又分为镜像对称与中心对称。对于旋转矩阵和平移向量,两者既可以单独作用于点的笛卡尔坐标,也可以以变换矩阵T的形式左乘物体的齐次坐标,实现对物体的旋转和平移;而反射变换只能以变换矩阵T的形式左乘物体齐次坐标,实现变换。在实际应用中,我们更倾向于使用齐次坐标表示物体,使用变换矩阵实现对物体的连续变换,从而使操作更加方便。


















 3211
3211

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











