






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
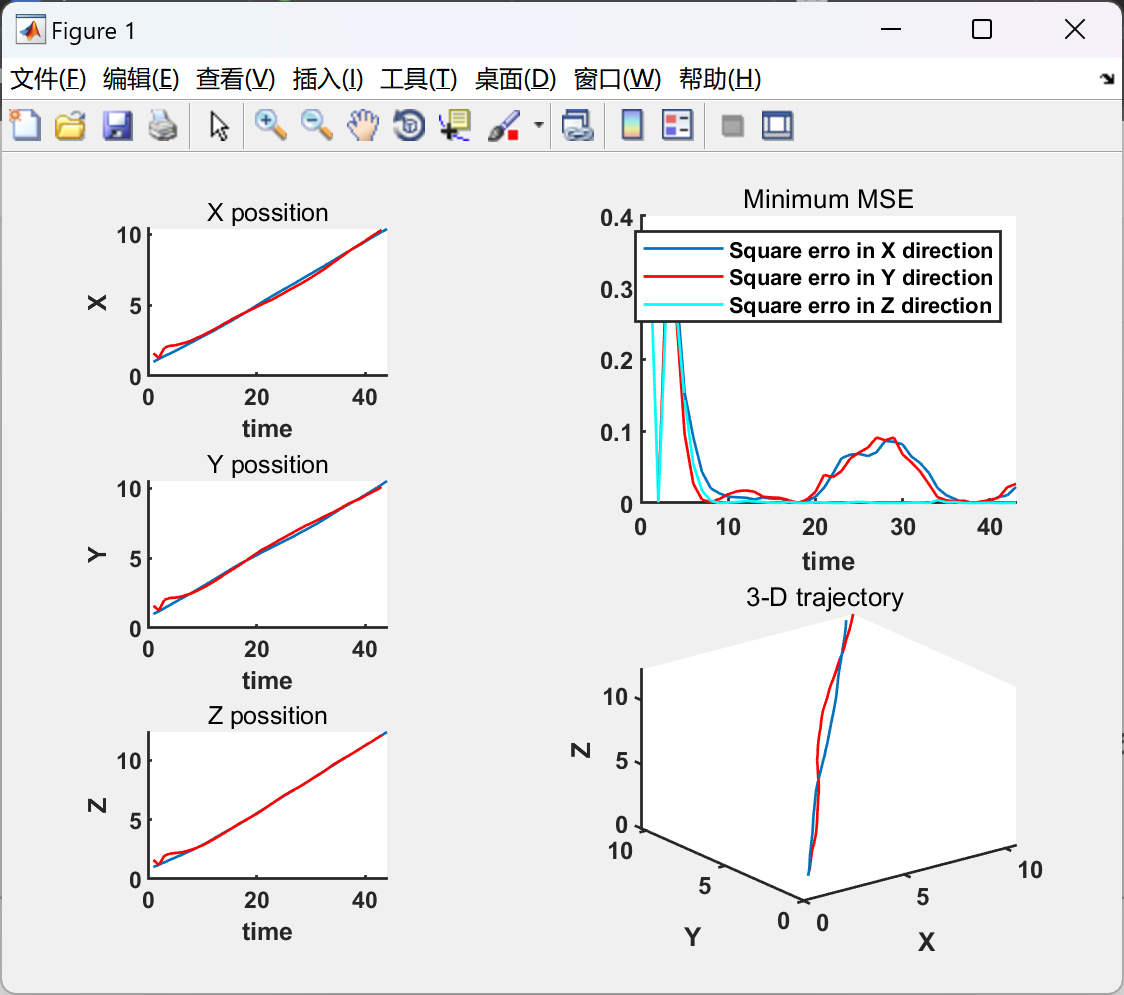
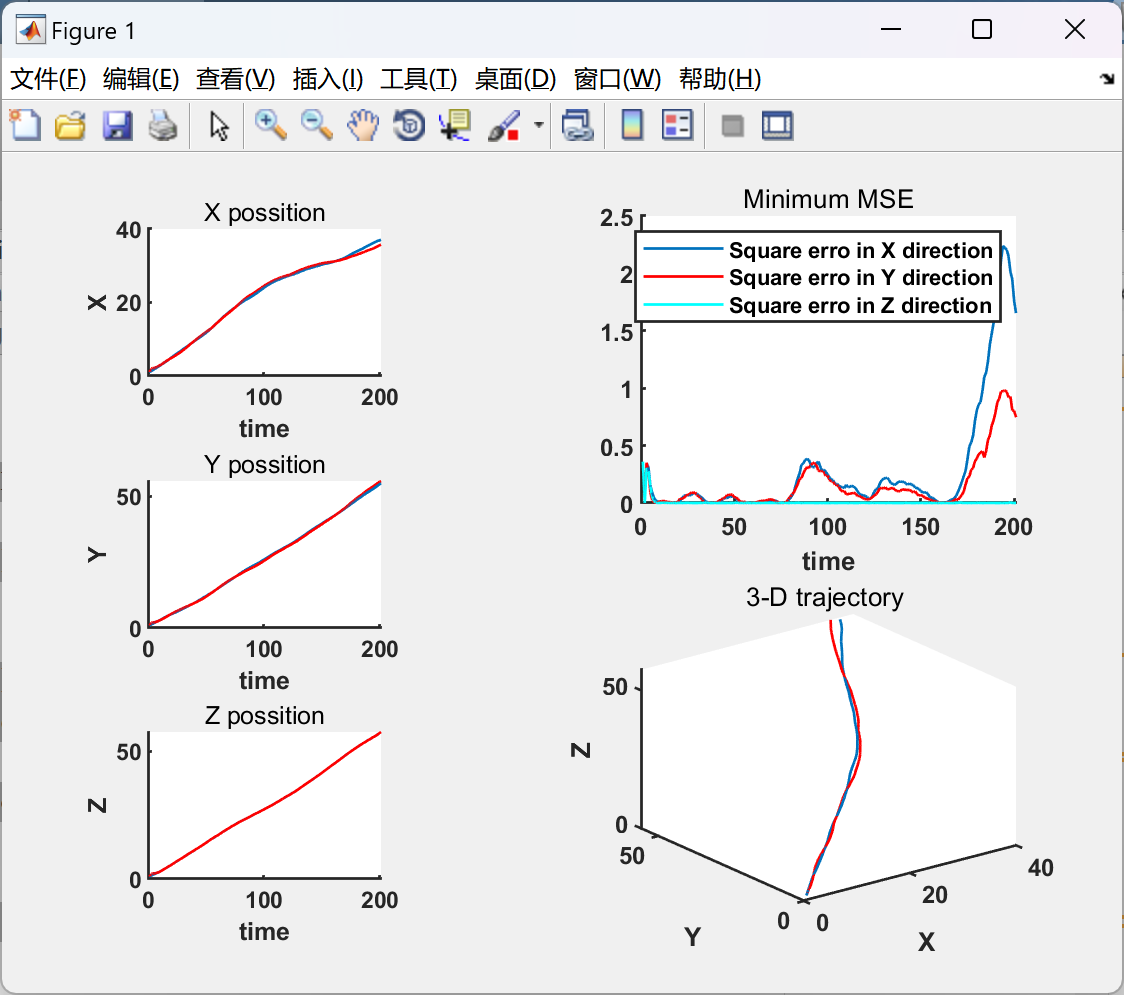
在3D中使用扩展卡尔曼滤波器跟踪物体,使用卡尔曼滤波器在3D中跟踪物体。比较扩展卡尔曼滤波器与其线性版本。假设我们想要跟踪一个在3D空间中以恒定速度移动的物体。我们的仪器观察到方位、距离和高度(柱面坐标)。然而,我们感兴趣的是直角坐标。由于转换是非线性的,这需要使用扩展卡尔曼滤波器。
因为X、Y和Range、Bearing之间的转换是非线性的,而Z和高度之间是线性的(Z是高度),这个问题可以作为一个很好的比较,展示扩展卡尔曼滤波器的性能如何。通过比较Z中的线性估计误差和X和Y中的非线性估计,我们可以判断非线性效应对估计的影响。
扩展卡尔曼滤波(EKF)是一种用于非线性动态系统的状态估计技术。在3D环境中,EKF可以用于跟踪物体在三维空间中的运动。下面是关于在3D中使用EKF跟踪物体的研究的一些要点:
### 1. 系统建模
在3D中使用EKF跟踪物体时,需要对物体的运动和测量进行建模:
- **状态模型**:定义物体在3D空间中的位置、速度和其他状态变量。一般情况下,状态向量可能包括物体的3D位置、3D速度以及其他相关的状态。
- **测量模型**:定义观测量与状态之间的关系。观测量可以是来自传感器(如GPS、惯性测量单元、摄像头等)的3D位置信息和速度信息。
### 2. 状态预测和更新
EKF的工作机制基于两个主要步骤:预测和更新。
- **预测步骤**:根据当前的状态估计和系统模型预测下一个时间步的状态。预测步骤使用系统的状态转移方程来计算。
- **更新步骤**:根据传感器的观测量来更新状态估计。更新步骤使用测量模型计算估计误差,并使用卡尔曼增益调整状态估计。
### 3. 噪声模型
在EKF中,需要为状态预测和观测量定义噪声模型:
- **过程噪声**:预测步骤中引入的噪声。通常假设为高斯噪声,描述了系统模型的不确定性。
- **测量噪声**:观测步骤中引入的噪声。通常也假设为高斯噪声,描述了传感器测量的不确定性。
### 4. 应用场景
在3D中使用EKF跟踪物体可以用于多种应用场景,包括:
- **无人机导航**:跟踪无人机在3D空间中的位置和速度。
- **机器人定位**:跟踪机器人在复杂环境中的3D位置和方向。
- **增强现实**:在增强现实应用中跟踪3D空间中的物体。
- **运动分析**:分析运动员在3D空间中的运动轨迹。
### 5. 研究挑战
在3D中使用EKF跟踪物体可能面临一些挑战:
- **非线性模型**:系统模型和测量模型可能高度非线性,EKF需要进行线性化处理。
- **计算复杂性**:由于状态维度较高,EKF的计算复杂性可能较高。
- **传感器融合**:在3D环境中,可能需要融合多个传感器的数据进行跟踪。
### 6. 研究方向
在3D中使用EKF跟踪物体的研究方向包括:
- **改进滤波算法**:优化EKF的线性化方法和卡尔曼增益计算。
- **多传感器融合**:研究如何融合来自多个传感器的数据,提高跟踪精度。
- **鲁棒性研究**:研究如何提高EKF对噪声和模型不确定性的鲁棒性。
在研究中,实际应用中的具体需求和传感器的可用性会决定具体的建模和算法选择。
📚2 运行结果

部分代码:
%THIS SUBROTINE GENERATES STATE PROCESS AND OBSERVATION PROCESS WITH
%GAUSSINA NOISE
function [D,Z,W,U]=proccesANDobserve(A,D,Z,Q,M,ind)
W=[0;0;0;sqrt(Q(4,4))*randn(1);sqrt(Q(5,5))*randn(1);sqrt(Q(6,6))*randn(1)]; % generating process noise
U=[sqrt(M(1,1))*randn(1);sqrt(M(1,1))*randn(1);sqrt(M(1,1))*randn(1)]; %generating observation noise
D=A*D+W; % State process
ARG=arctang(D(2),D(1),ind);% ARGUMENT
Z=[sqrt(D(1)^2+D(2)^2);ARG;D(3)]+U; % observation
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]范文兵,刘春风,张素贞.一种强跟踪扩展卡尔曼滤波器的改进算法[J].控制与决策, 2006, 21(1):4.DOI:10.3321/j.issn:1001-0920.2006.01.016.
[2]吴涛,汪立新,林孝焰.改进扩展卡尔曼滤波器对机动目标的跟踪定位[C]//中国通信学会第五届学术年会.2008.
[3]张海强,窦丽华,陈杰,等.改进扩展卡尔曼滤波器对机动目标的跟踪定位[J].[2024-04-17].
[4]赖志路.改进的扩展卡尔曼滤波和粒子滤波在时变结构系统识别与损伤在线诊断的研究[D].厦门大学,2013.















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









