







标准D-H参数(SDH)
关节角:绕
轴,
旋转到
的角度;
偏置距离:沿
轴,
移动到
的距离;
连杆长度:从
轴,
移动到
的距离;
连杆扭角:绕
轴,
旋转到
的角度;
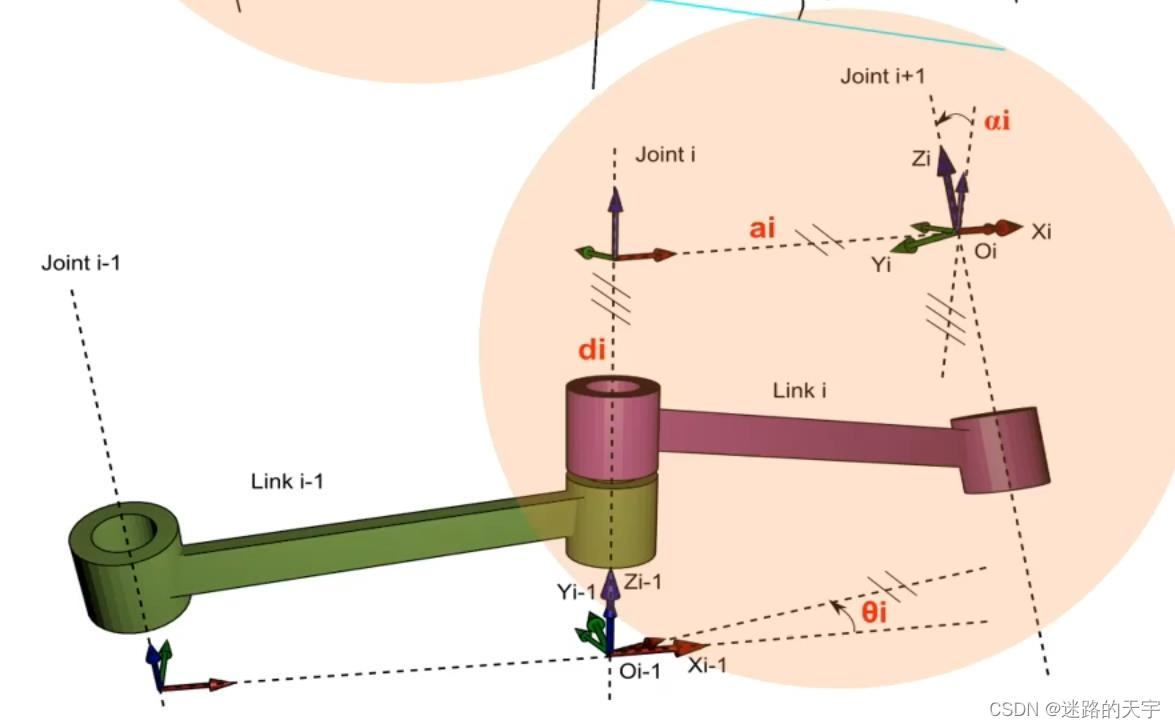
1、坐标系的建立
对于连杆i - 1,首先将连杆i - 1的远端轴线(即关节轴i)作为轴,关节轴i - 1与i轴的公垂线作为
轴,右手定则确定
轴。
2、坐标变换顺序
轴绕
轴旋转
角度,
沿
轴移动
,
沿
轴移动
,
轴绕
关节角:绕
轴,
旋转到
的角度;
偏置距离:沿
轴,
移动到
的距离;
连杆长度:从
轴,
移动到
的距离;
连杆扭角:绕
轴,
旋转到
的角度;
对于连杆i - 1,首先将连杆i - 1的远端轴线(即关节轴i)作为轴,关节轴i - 1与i轴的公垂线作为
轴,右手定则确定
轴。
轴绕
轴旋转
角度,
沿
轴移动
,
沿
轴移动
,
轴绕
 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























