







目录
1 概述
随着自动化技术的发展,现代航空技术水平有了前所未有的提高,促进了无人机在军事、民用领域的广泛应用。航迹规划技术作为无人机任务规划的关键技术,一直都是无人机领域的一大研究热点。无人机航迹规划是指在满足其运动约束条件的同时,寻找无人机从起始点到目标点符合某种性能指标的最优或次优的可飞轨迹。在现实应用中,由于无人机飞行环境复杂,约束条件多,航迹规划的质量不仅取决算法的优劣还与解决问题的策略相关,因此如何建立准确的环境模型和如何选取高效的规划算法成为解决航迹规划问题的要素。
1.1研究背景
本文是在Astar算法的基础上,对无人机三维航迹规划问题展开研究,主要研究内容如下:
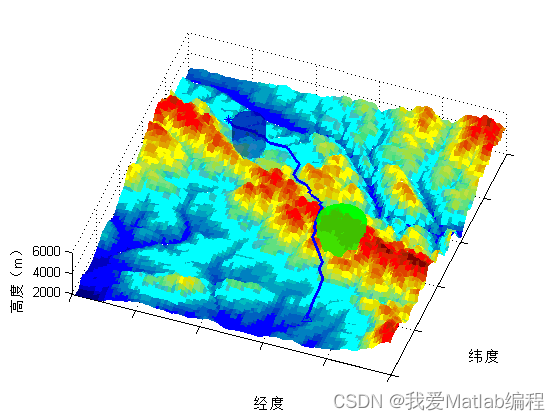
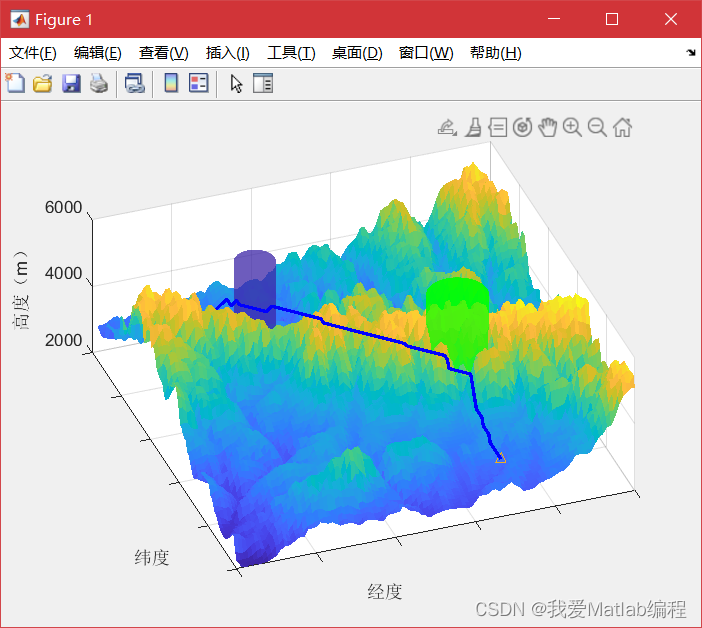
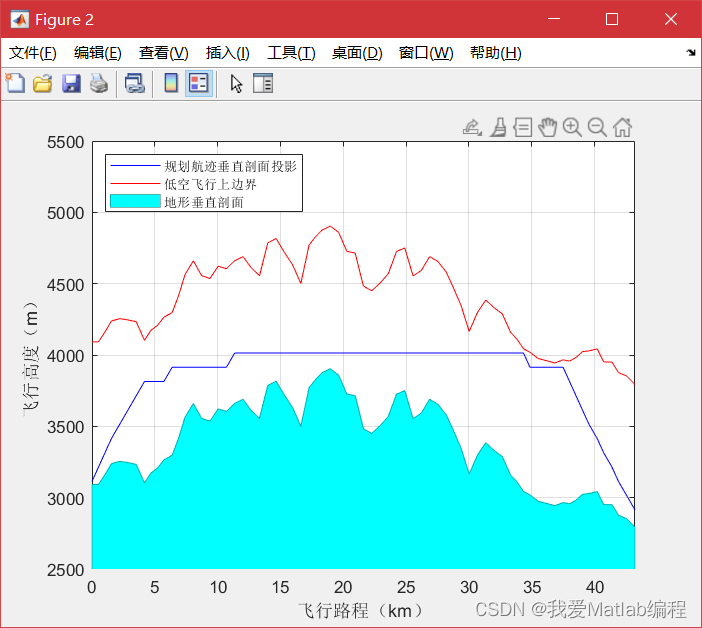
首先,对无人机航迹规划相关问题进行数学建模,包括无人机模型、机动性能约束和等效数字地图。重点介绍飞行空间三维数学模型的建立,将飞行区域中基准地形、山峰及威胁综合,建立包含飞行区域综合信息的三维数学模型。为后面研究无人机离线、在线航迹规划问题做了铺垫。
其次,研究基于遗传算法的无人机三维离线航迹规划。Astar算法解决航迹规划问题需要进行复杂的编码,故需要改进进化操作算子。本文根据航迹段特点改进变异操作算子,从而生成更适合无人机飞行的航迹。此外针对Astar算法早熟问题改进适应度函数,构造一种随进化代数动态调整的非线性适应度函数,该方法解决了算法早熟问题并且提高了算法收敛速度。
最后,研究基于Astar算法的在线航迹规划。由于在突发威胁情况下需要采取应急的二次重规划,为提高应对突发威胁的应急能力,在线航迹规划阶段应选用实时性较好的规划算法。
2 运行结果
3 Matlab代码实现
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% A* Terrain Profile ALGORITHM Demo
% Traditional A* search demo 3D
% 01-31-2014
% Design by ybma
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear
load ('MapData.mat');
WayPoints = [];
WayPointsAll = [];
OPEN_COUNT = 0;
OPEN_COUNT_ALL = 0;
%%%%%%Terrain Data Fill%%%%%%%
Cut_Data = Final_Data(301:400,101:200);
MIN_Final_Data = min(min(Cut_Data));
%%%%%%%ALGORITHM START%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%Compute time%%%%%%%%%%%
tic
timerVal = tic
[WayPoints,OPEN_COUNT] = A_star(MAX_X,MAX_Y,MAX_Z,20,20,7,90,70,5,MAP,CLOSED,Display_Data);
toc(timerVal)
elapsedTime = toc(timerVal)
figure(1)
axis([1 MAX_X 1 MAX_Y 1 MAX_Z]);
plot3(WayPoints(:,1),WayPoints(:,2),WayPoints(:,3),'b','linewidth',2);
hold on
surf(Display_Data(1:100,1:100)','linestyle','none');
plot3(20,20,7,'*');
plot3(90,70,5,'^');
set(gca,'xticklabel','');
set(gca,'yticklabel','');
set(gca,'zticklabel',{'2000','4000','6000','4000','5000','6000','7000','8000','9000','10000'});
xlabel('纬度');
ylabel('经度');
zlabel('高度(m)');
grid on
4 参考文献
[1]晁泽睿,南英,王昕,冯开.基于数字地图的三维飞行轨迹规划技术[J].舰船电子工程,2022,42(06):107-111+139.
[2]李喆,王顺森,李勇,吴军,颜晓江,徐耀博.船舶管线智能布置的优化Astar算法[J/OL].西安交通大学学报,2022(12):1-10[2022-10-19].http://kns.cnki.net/kcms/detail/61.1069.t.20220823.1101.002.html
部分理论来源于网络,如有侵权请联系删除。















 421
421











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









