







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
文献来源:
该文提出一种无人机两步路径规划算法。该算法通过一组已知位置的敌方雷达站点生成隐形路径,并提供一种直观的方法来权衡隐身与路径长度。第一步,通过构建和搜索基于 Voronoi 多边形的图形,通过雷达站点生成次优粗切路径。在第二步中,以图解作为初始条件,模拟一组非线性常微分方程。常微分方程描述了位于虚拟力场中的一组虚拟质量的动力学。虚拟力量将群众从雷达上推开,彼此靠近。对常微分方程进行仿真以找到局部的指数稳定平衡解,该解被解释为最佳路径。提供了一个模拟来说明这个想法。
原文摘要:
Abstract:
In this paper, a two step path-planning algorithm for UAVs is proposed. The algorithm generates a stealthy path through a set of enemy radar sites of known location, and provides an intuitive way to trade-off stealth versus path length. In the first step, a suboptimal rough-cut path is generated through the radar sites by constructing and searching a graph based on Voronoi polygons. In the second step, a set of nonlinear ordinary differential equations are simulated, using the graph solution as an initial condition. The ODEs describe the dynamics of a set of virtual masses located in a virtual force field. The virtual forces push the masses away from the radar and toward one another. The ODEs are simulated to find a locally, exponentially stable equilibrium solution, which is interpreted as the optimal path. A simulation is provided to illustrate the idea.
📚2 运行结果



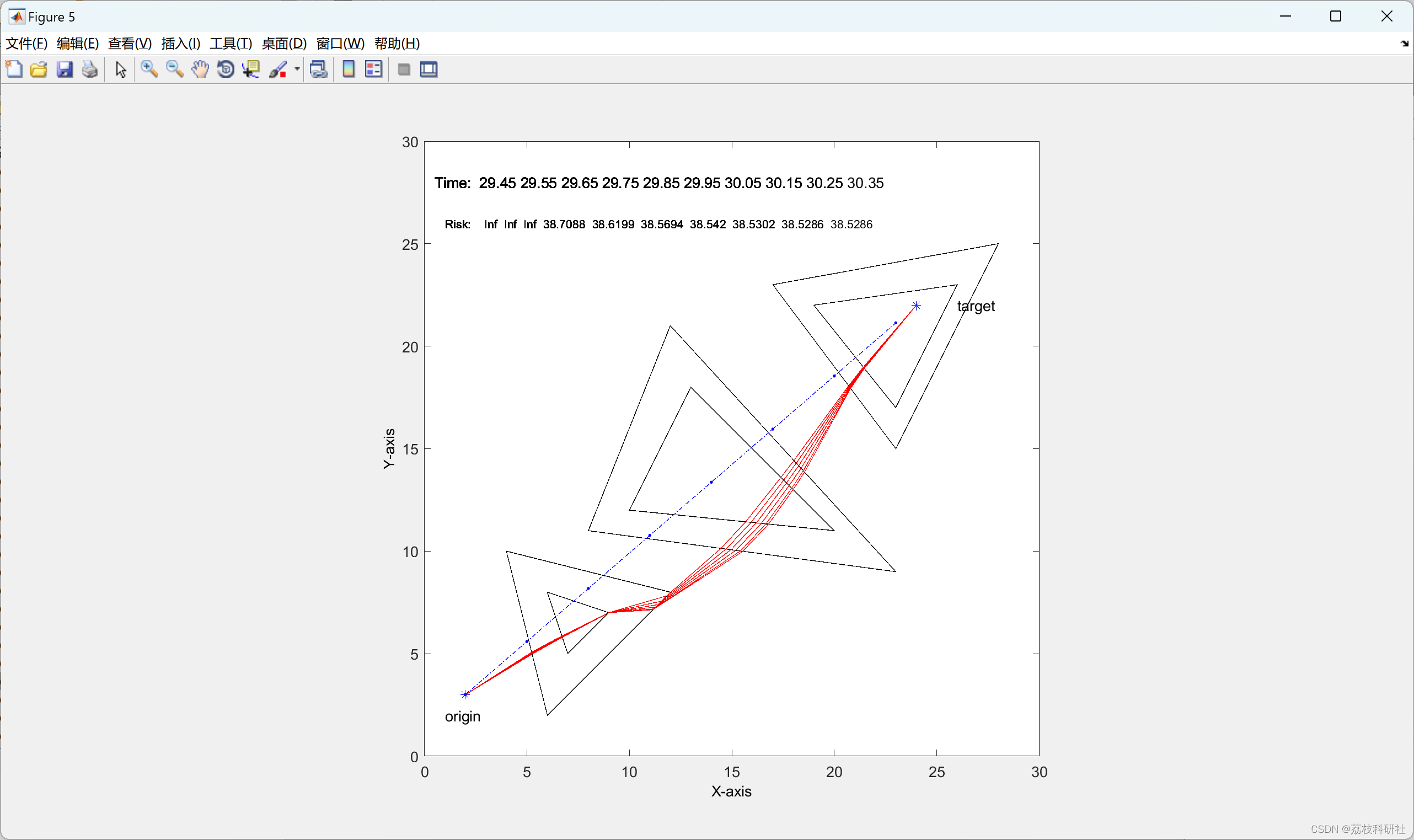
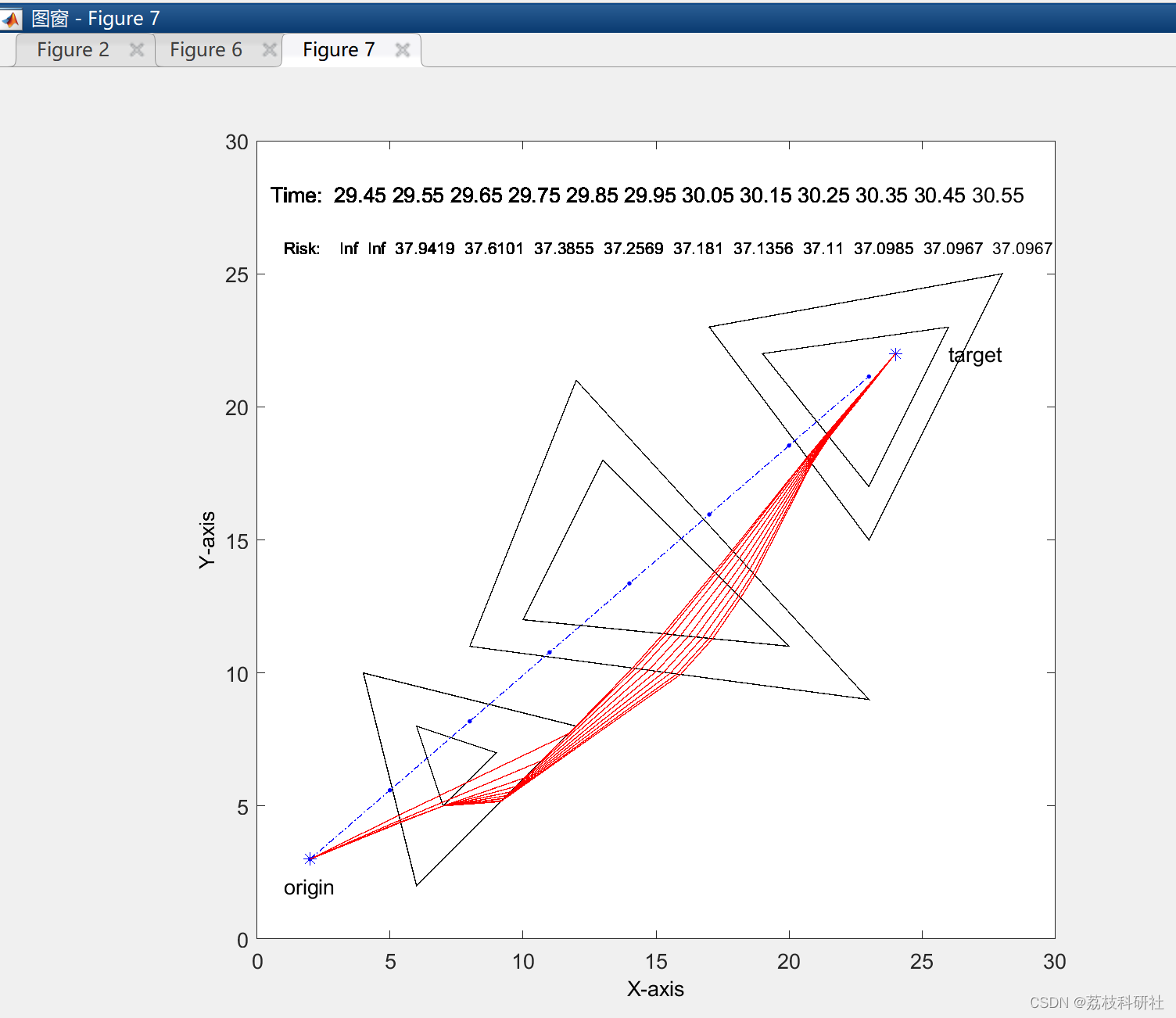
部分代码:
tZone(6).Xt = [19,23,26];
tZone(6).Yt = [22,17,23];
tZone(6).tp = 1.8;
for index = 1:numtZone
fill(tZone(index).Xt,tZone(index).Yt,'w');
end
Xod = [2,24];
Yod = [3,22];
plot(Xod,Yod,'*b');
text(Xod(1)-1,Yod(1)-1,'origin');
text(Xod(2)+2,Yod(2),'target');
dy = (Yod(2)-Yod(1));
dx = (Xod(2)-Xod(1));
m = dy/dx;
X = (Xod(1):3:Xod(end));
yc = (m*Xod(1)-Yod(1));
Y = m*X - yc;
plot(X,Y,'.-.b')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]S. A. Bortoff, "Path planning for UAVs," Proceedings of the 2000 American Control Conference. ACC (IEEE Cat. No.00CH36334), Chicago, IL, USA, 2000, pp. 364-368 vol.1, doi: 10.1109/ACC.2000.878915.
















 387
387











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











