






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
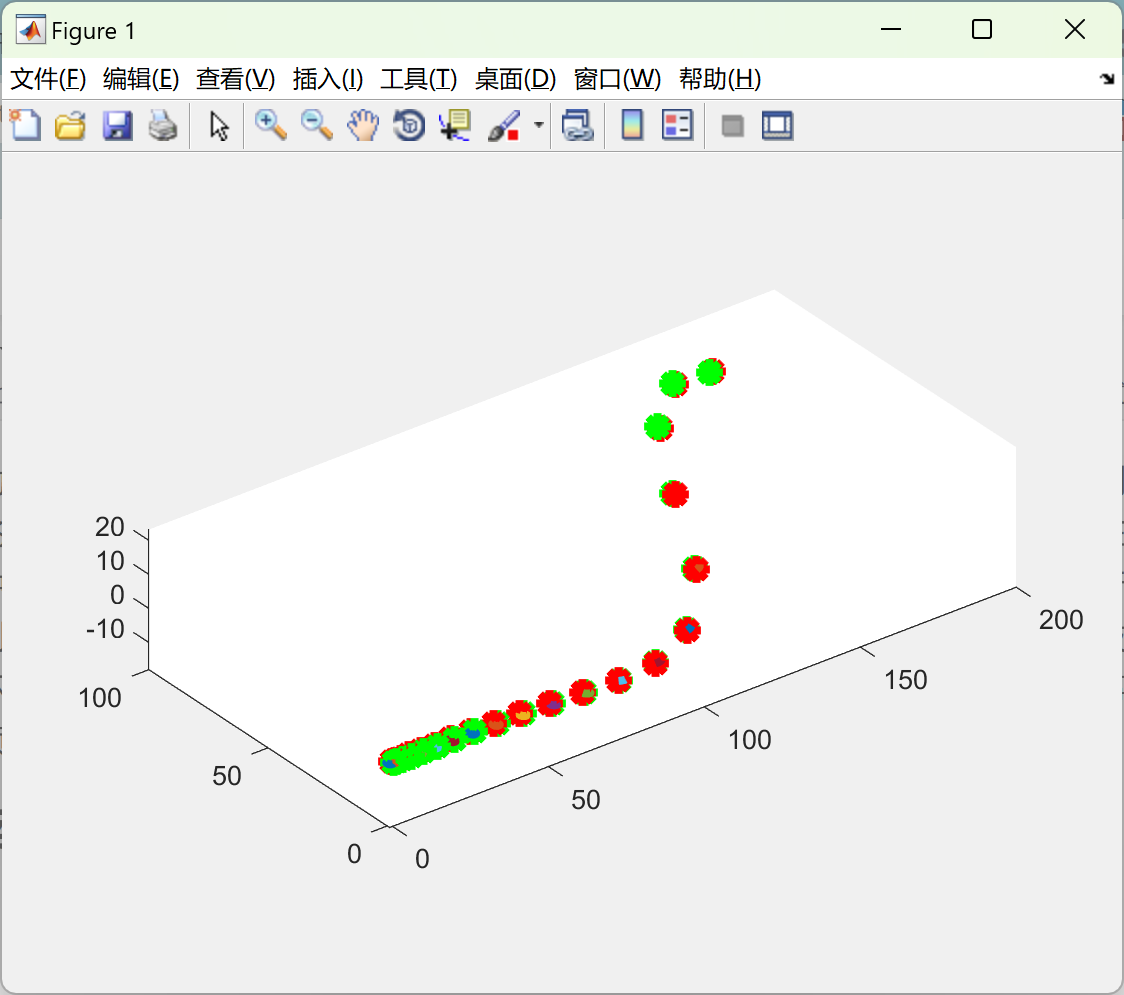
无人机动态系统建模与控制器设计是指对无人机的动态行为进行建模,并设计相应的控制器以实现特定的飞行任务。这个过程涉及到对无人机的力学、动力学和控制理论的综合应用,旨在实现无人机在各种环境下的稳定、精确的控制。对无人机的物理结构、质量分布、惯性特性等进行建模,通常使用刚体动力学理论描述无人机的运动。无人机动态系统建模与控制器设计是无人机技术发展中的重要环节,能够实现无人机在各种复杂环境下的稳定、精确的控制,推动无人机在军事、民用、科研等领域的广泛应用。
📚2 运行结果
主函数部分代码:
clear all
close all
steps=20;
inputs=[0 0 9.8 0 0 .03]';
hexa=UAV();
hexa = setOrientation(hexa, [0, .1, 0]);
timestep=1;
position=zeros(3,steps+1);
orientation=zeros(3,steps+1);
velocity=zeros(3,steps+1);
rotation=zeros(3,steps+1);
position(:,1)=getPosition(hexa);
orientation(:,1)=getOrientation(hexa);
velocity(:,1)=getVelocity(hexa);
rotation(:,1)=getAngularRate(hexa);
for i = 1:steps
clc
fprintf('In time step %0.f:\n',i);
if(i==10)input(6)=0;end
hexa = simulateExtendedUAV(hexa, inputs, timestep);
showExtendedUAV(hexa);
daspect([1,1,1]);
position(:,i+1)=getPosition(hexa);
orientation(:,i+1)=getOrientation(hexa);
velocity(:,i+1)=getVelocity(hexa);
rotation(:,i+1)=getAngularRate(hexa);
pause(.2);
end
horizontal=0:steps;
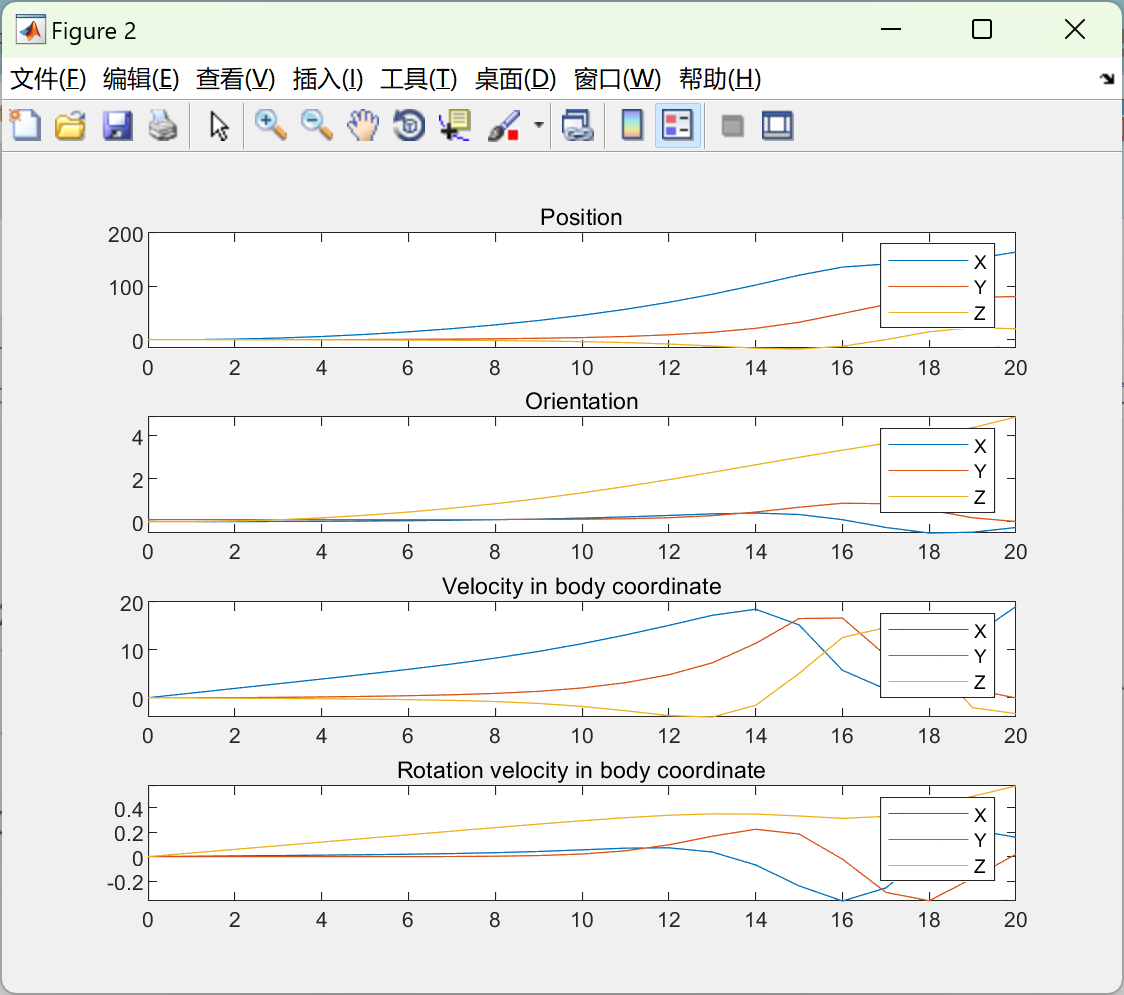
figure;
subplot(4,1,1)
plot(horizontal,position);
legend('X','Y','Z');
title('Position');
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]王飞,杨清平.面向多无人机物流配送的双层任务规划方法[J/OL].北京航空航天大学学报:1-14[2024-04-07].https://doi.org/10.13700/j.bh.1001-5965.2023.0719.
[2]冯小刚,沈立华,李喜龙,等.无人机巡检技术在某地浸铀矿山的研究与应用[J/OL].铀矿冶:1-8[2024-04-07].https://doi.org/10.13426/j.cnki.yky.2023.12.06.















 3948
3948











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









