






0. 简介
对于最近出来的Point-LIO(鲁棒高带宽激光惯性里程计),本人还是非常该兴趣的,为此花了一些时间重点分析了Point-LIO的代码,并研究了它相较于Fast-LIO2的区别
1. laserMapping.cpp
第一部分就是实现对激光雷达视场角的图像分割。首先定义了一个BoxPointType类型的局部地图(LocalMap_Points)和一个bool类型的变量(Localmap_Initialized),表示是否已经初始化局部地图。然后,在lasermap_fov_segment()函数中,根据激光雷达的姿态计算出激光雷达的位置(pos_LiD),并根据移动阈值(MOV_THRESHOLD)判断是否需要移动局部地图。如果需要移动,则计算新的局部地图边界(New_LocalMap_Points),并将需要移除的框添加到cub_needrm中。最后,根据cub_needrm中的框删除点云,完成图像分割。
BoxPointType LocalMap_Points;
bool Localmap_Initialized = false;
void lasermap_fov_segment() //针对激光雷达视场角来完成图像分割
{
cub_needrm.shrink_to_fit(); //将容量设置为容器的长度
V3D pos_LiD;
if (use_imu_as_input) {
pos_LiD =
kf_input.x_.pos + kf_input.x_.rot.normalized() *
Lidar_T_wrt_IMU; //计算激光雷达在当前位姿下的位置
} else {
pos_LiD =
kf_output.x_.pos + kf_output.x_.rot.normalized() * Lidar_T_wrt_IMU;
}
if (!Localmap_Initialized) { //判断是否需要初始化局部地图
//将局部地图的边界设置为当前位置的正方形区域,并将Localmap_Initialized设置为true
for (int i = 0; i < 3; i++) {
LocalMap_Points.vertex_min[i] = pos_LiD(i) - cube_len / 2.0;
LocalMap_Points.vertex_max[i] = pos_LiD(i) + cube_len / 2.0;
}
Localmap_Initialized = true;
return;
}
float dist_to_map_edge[3][2];
bool need_move = false;
//如果不需要初始化,则计算激光雷达当前位姿与局部地图边界的距离,并根据移动阈值判断是否需要移动局部地图
for (int i = 0; i < 3; i++) {
dist_to_map_edge[i][0] = fabs(pos_LiD(i) - LocalMap_Points.vertex_min[i]);
dist_to_map_edge[i][1] = fabs(pos_LiD(i) - LocalMap_Points.vertex_max[i]);
if (dist_to_map_edge[i][0] <= MOV_THRESHOLD * DET_RANGE ||
dist_to_map_edge[i][1] <= MOV_THRESHOLD * DET_RANGE)
need_move = true;
}
//如果需要移动,则计算新的局部地图边界
if (!need_move)
return;
BoxPointType New_LocalMap_Points, tmp_boxpoints;
New_LocalMap_Points = LocalMap_Points;
float mov_dist = max((cube_len - 2.0 * MOV_THRESHOLD * DET_RANGE) * 0.5 * 0.9,
double(DET_RANGE * (MOV_THRESHOLD - 1)));
for (int i = 0; i < 3; i++) {
tmp_boxpoints = LocalMap_Points;
if (dist_to_map_edge[i][0] <= MOV_THRESHOLD * DET_RANGE) {
New_LocalMap_Points.vertex_max[i] -= mov_dist;
New_LocalMap_Points.vertex_min[i] -= mov_dist;
tmp_boxpoints.vertex_min[i] = LocalMap_Points.vertex_max[i] - mov_dist;
cub_needrm.emplace_back(tmp_boxpoints); //将需要移除的框添加到cub_needrm中
} else if (dist_to_map_edge[i][1] <= MOV_THRESHOLD * DET_RANGE) {
New_LocalMap_Points.vertex_max[i] += mov_dist;
New_LocalMap_Points.vertex_min[i] += mov_dist;
tmp_boxpoints.vertex_max[i] = LocalMap_Points.vertex_min[i] + mov_dist;
cub_needrm.emplace_back(tmp_boxpoints);
}
}
LocalMap_Points = New_LocalMap_Points;
points_cache_collect();
if (cub_needrm.size() > 0)
int kdtree_delete_counter = ikdtree.Delete_Point_Boxes(
cub_needrm); //收集点云缓存,并根据cub_needrm中的框删除点云,返回删除的框数量。
}
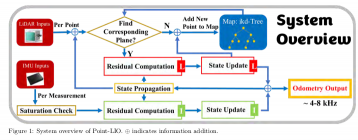
下面我们来看看怎么使用这个函数的,下面的代码主要实现了以下的操作:
1.对激光雷达采集到的点云进行空间下采样和时间压缩;
2.初始化地图kd-tree;
3.使用迭代最近点算法(ICP)和卡尔曼滤波更新地图。其中,ICP主要用于点云配准,卡尔曼滤波则用于对机器人位姿进行估计和更新。
lasermap_fov_segment();
/*** downsample the feature points in a scan ***/
t1 = omp_get_wtime();
if (space_down_sample) { //空间下采样
downSizeFilterSurf.setInputCloud(feats_undistort);
downSizeFilterSurf.filter(*feats_down_body);
sort(feats_down_body->points.begin(), feats_down_body->points.end(),
time_list); //按时间排序
} else {
feats_down_body = Measures.lidar;
sort(feats_down_body->points.begin(), feats_down_body->points.end(),
time_list);
}
time_seq = time_compressing<int>(feats_down_body); //时间压缩
feats_down_size = feats_down_body->points.size(); //点云数量
/*** initialize the map kdtree ***/
if (!init_map) {
if (ikdtree.Root_Node == nullptr) //
// if(feats_down_size > 5)
{
ikdtree.set_downsample_param(filter_size_map_min); //设置滤波参数
}
feats_down_world->resize(feats_down_size); //初始化点云
for (int i = 0; i < feats_down_size; i++) {
pointBodyToWorld(&(feats_down_body->points[i]),
&(feats_down_world->points[i])); //转换到世界坐标系
}
for (size_t i = 0; i < feats_down_world->size(); i++) {
init_feats_world->points.emplace_back(
feats_down_world
->points[i]); //将转换到世界坐标西的点云加入到init_feats_world
}
if (init_feats_world->size() < init_map_size) //等待构建地图
continue;
ikdtree.Build(init_feats_world->points); //构建地图
init_map = true;
publish_init_kdtree(pubLaserCloudMap); //(pubLaserCloudFullRes);
continue;
}
/*** ICP and Kalman filter update ***/
normvec->resize(feats_down_size);
feats_down_world->resize(feats_down_size);
Nearest_Points.resize(feats_down_size);
t2 = omp_get_wtime(); //初始化t2为当前时间
/*** iterated state estimation ***/
crossmat_list.reserve(feats_down_size);
pbody_list.reserve(feats_down_size);
// pbody_ext_list.reserve(feats_down_size);
//对于每个点,将其坐标转换为V3D类型的point_this
for (size_t i = 0; i < feats_down_body->size(); i++) {
V3D point_this(feats_down_body->points[i].x,
feats_down_body->points[i].y,
feats_down_body->points[i].z);
pbody_list[i] = point_this;
//如果使用外参估计
if (extrinsic_est_en) {
if (!use_imu_as_input) {
//对于每个点,使用卡尔曼滤波估计出的外参对其进行坐标变换
point_this = kf_output.x_.offset_R_L_I.normalized() * point_this +
kf_output.x_.offset_T_L_I;
} else {
point_this = kf_input.x_.offset_R_L_I.normalized() * point_this +
kf_input.x_.offset_T_L_I;
}
} else {
// 使用Lidar_R_wrt_IMU和Lidar_T_wrt_IMU对其进行变换
point_this = Lidar_R_wrt_IMU * point_this + Lidar_T_wrt_IMU;
}
M3D point_crossmat;
point_crossmat << SKEW_SYM_MATRX(point_this); //根据当前点生成矩阵
crossmat_list[i] = point_crossmat;
}
if (!use_imu_as_input) {
bool imu_upda_cov = false; //是否需要更新imu的协方差
effct_feat_num = 0;
/**** point by point update ****/
double pcl_beg_time =
Measures
.lidar_beg_time; //首先设置pcl_beg_time为Measures.lidar_beg_time,idx为-1
idx = -1;
for (k = 0; k < time_seq.size(); k++) {
PointType &point_body = feats_down_body->points[idx + time_seq[k]];
time_current =
point_body.curvature / 1000.0 +
pcl_beg_time; //找到对应的点并计算出当前时间time_current
if (is_first_frame) {
if (imu_en) { //如果是第一帧,且启用了IMU,那么需要找到最近的IMU数据
while (time_current > imu_next.header.stamp.toSec()) {
imu_last = imu_next;
imu_next = *(imu_deque.front());
imu_deque.pop_front();
// imu_deque.pop();
}
//计算出对应的角速度和加速度
angvel_avr << imu_last.angular_velocity.x,
imu_last.angular_velocity.y, imu_last.angular_velocity.z;
acc_avr << imu_last.linear_acceleration.x,
imu_last.linear_acceleration.y,
imu_last.linear_acceleration.z;
}
is_first_frame = false;
imu_upda_cov = true;
time_update_last = time_current;
time_predict_last_const = time_current;
}
if (imu_en) {
bool imu_comes = time_current > imu_next.header.stamp.toSec();
// 如果启用了IMU,那么需要在当前时间之前的IMU数据都进行卡尔曼滤波更新
while (imu_comes) {
imu_upda_cov = true;
//将IMU数据中的角速度和线性加速度分别存储到angvel_avr和acc_avr中
angvel_avr << imu_next.angular_velocity.x,
imu_next.angular_velocity.y, imu_next.angular_velocity.z;
acc_avr << imu_next.linear_acceleration.x,
imu_next.linear_acceleration.y,
imu_next.linear_acceleration.z;
/*** 对协方差进行更新 ***/
imu_last = imu_next; //将当前IMU数据存储为imu_last
imu_next = *(imu_deque.front()); //将下一个IMU数据存储为imu_next
imu_deque.pop_front();
double dt = imu_last.header.stamp.toSec() -
time_predict_last_const; //接着计算时间差dt
kf_output.predict(dt, Q_output, input_in, true,
false); //通过kf_output.predict函数进行预测
time_predict_last_const =
imu_last.header.stamp.toSec(); // big problem
imu_comes = time_current > imu_next.header.stamp.toSec();
// if (!imu_comes)
{
double dt_cov = imu_last.header.stamp.toSec() -
time_update_last; //就计算时间差dt_cov
if (dt_cov > 0.0) {
time_update_last = imu_last.header.stamp.toSec();
double propag_imu_start = omp_get_wtime();
kf_output.predict(dt_cov, Q_output, input_in, false,
true); //行卡尔曼滤波预测
propag_time += omp_get_wtime() - propag_imu_start;
double solve_imu_start = omp_get_wtime();
kf_output.update_iterated_dyn_share_IMU(); //进行eskf迭代更新
solve_time += omp_get_wtime() - solve_imu_start;
}
}
}
}
double dt = time_current - time_predict_last_const;
double propag_state_start = omp_get_wtime();
if (!prop_at_freq_of_imu) {
double dt_cov = time_current - time_update_last;
if (dt_cov > 0.0) {
kf_output.predict(dt_cov, Q_output, input_in, false, true);
time_update_last = time_current;
}
}
kf_output.predict(dt, Q_output, input_in, true, false);
propag_time += omp_get_wtime() - propag_state_start;
time_predict_last_const = time_current;
// if(k == 0)
// {
// fout_imu_pbp << Measures.lidar_last_time - first_lidar_time <<
// " " << imu_last.angular_velocity.x << " " <<
// imu_last.angular_velocity.y << " " <<
// imu_last.angular_velocity.z \ // << " " << imu_last.linear_acceleration.x << " " <<
// imu_last.linear_acceleration.y << " " <<
// imu_last.linear_acceleration.z << endl;
// }
double t_update_start = omp_get_wtime();
if (feats_down_size < 1) {
ROS_WARN("No point, skip this scan!\n");
idx += time_seq[k];
continue;
}
if (!kf_output.update_iterated_dyn_share_modified()) {
idx = idx + time_seq[k];
continue;
}
if (prop_at_freq_of_imu) {
double dt_cov = time_current - time_update_last;
if (!imu_en &&
(dt_cov >=
imu_time_inte)) // //需要在当前时间之前的时间间隔大于imu_time_inte时进行卡尔曼滤波协方差更新
{
double propag_cov_start = omp_get_wtime();
kf_output.predict(
dt_cov, Q_output, input_in, false,
true); //对于每个时间片中的点,进行卡尔曼滤波更新,并将点转换到世界坐标系中
imu_upda_cov = false;
time_update_last = time_current;
propag_time += omp_get_wtime() - propag_cov_start;
}
}
solve_start = omp_get_wtime();点击代码浅析Point-LIO - 古月居 可查看全文















 578
578

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









