






最近在看PointLio的代码,有一部分看了半天没看懂,学习整理如下。
1、PointLio在迭代卡尔曼部分的代码
在esekfom.hpp中,有部分代码如下:
void init_dyn_share_modified(processModel f_in, processMatrix1 f_x_in, measurementModel_dyn_share_modified h_dyn_share_in)
{
f = f_in;
f_x = f_x_in;
// f_w = f_w_in;
h_dyn_share_modified_1 = h_dyn_share_in;
maximum_iter = 1;
x_.build_S2_state();
x_.build_SO3_state();
x_.build_vect_state();
x_.build_SEN_state();
}
之后,在迭代更新时,部分代码如下:
bool update_iterated_dyn_share_modified() {
dyn_share_modified<scalar_type> dyn_share;
state x_propagated = x_;
int dof_Measurement;
double m_noise;
for(int i=0; i<maximum_iter; i++)
{
dyn_share.valid = true;
// 调用了 h_dyn_share_modified_1 函数,这个函数的类型是 `measurementModel_dyn_share_modified`
// measurementModel_dyn_share_modified 是 void (state &, dyn_share_modified<scalar_type> &) 这个类型函数的一个别名;
// 具体的,这个函数的实现是: h_dyn_share_modified_1 指向的 `h_dyn_share_in`(在初始化init_dyn_share_modified(_2h)中)
// 而 h_dyn_share_in 是 h_model_input,在 estimateor.cpp 中被定义了具体实现。
h_dyn_share_modified_1(x_, dyn_share);
if(! dyn_share.valid)
{
return false;
// continue;
}
// 省略后续代码...
比较费解的是,上述代码中,h_dyn_share_modified_1(x_, dyn_share);这一行到底是在做什么。
仔细去看定义,可以发现,具体定义如下:
typedef Eigen::Matrix<scalar_type, m, n> processMatrix1(state &, const input &);
typedef Eigen::Matrix<scalar_type, m, process_noise_dof> processMatrix2(state &, const input &);
typedef Eigen::Matrix<scalar_type, process_noise_dof, process_noise_dof> processnoisecovariance;
typedef void measurementModel_dyn_share_modified(state &, dyn_share_modified<scalar_type> &);
其实也看不懂,于是问了下GPT,知道了这是“函数指针”,但还是云里雾里;又翻开了《C++Primer》和查阅了一些网络资料。
2、函数指针
函数指针和指针函数,区别如下:
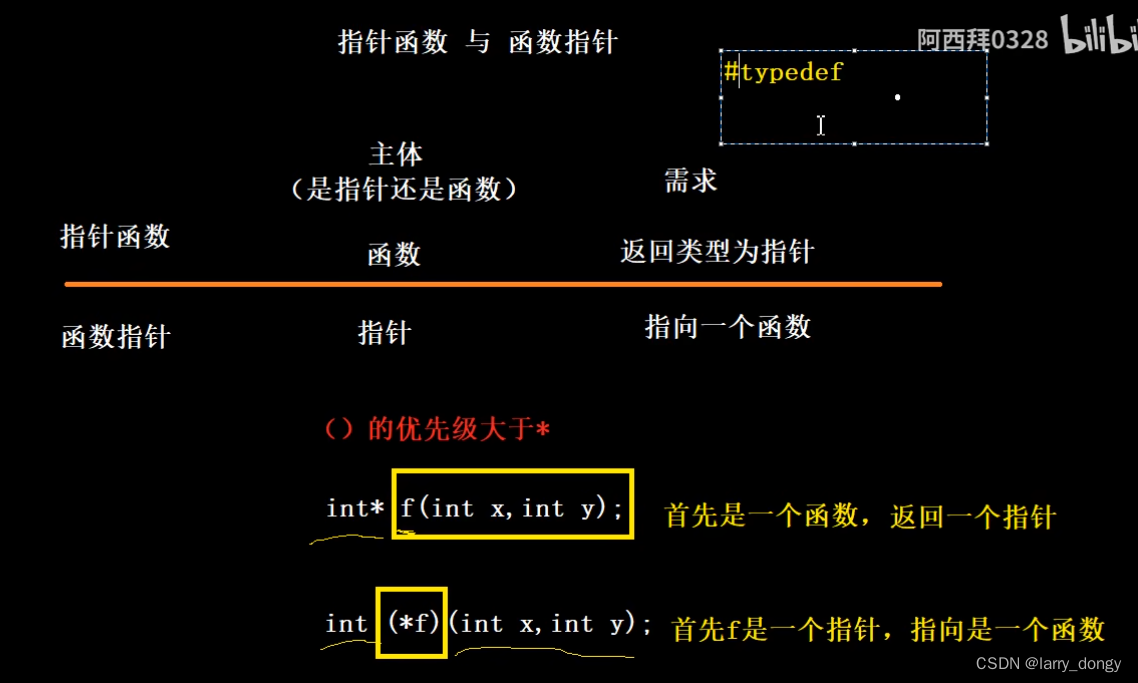
图片来自哔哩哔哩:指针函数与函数指针
概括来说,函数指针,是一个指针,指向一个函数。那么面临着一个问题,这个函数到底是什么类型?
2.1 函数的类型
之前一直没有关注过函数的“类型”,《C++ Primer》指出:
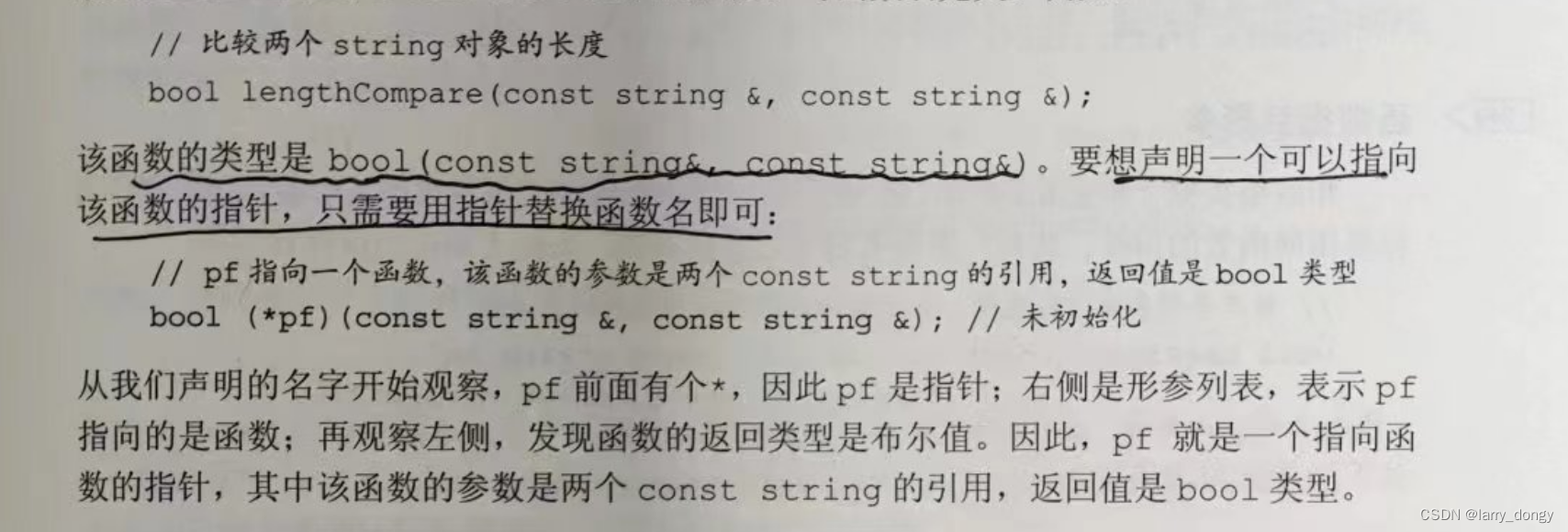
即函数应该是一个 bool (const string&, const string&) 类型,那么函数指针就是一个指向这种类型的函数的一个指针。函数名称可以是任何名字。
2.2 形参为指针的函数
由于函数指针,本质上是一个指针,那么这个指针,可以当作另一个函数的形参,如下:
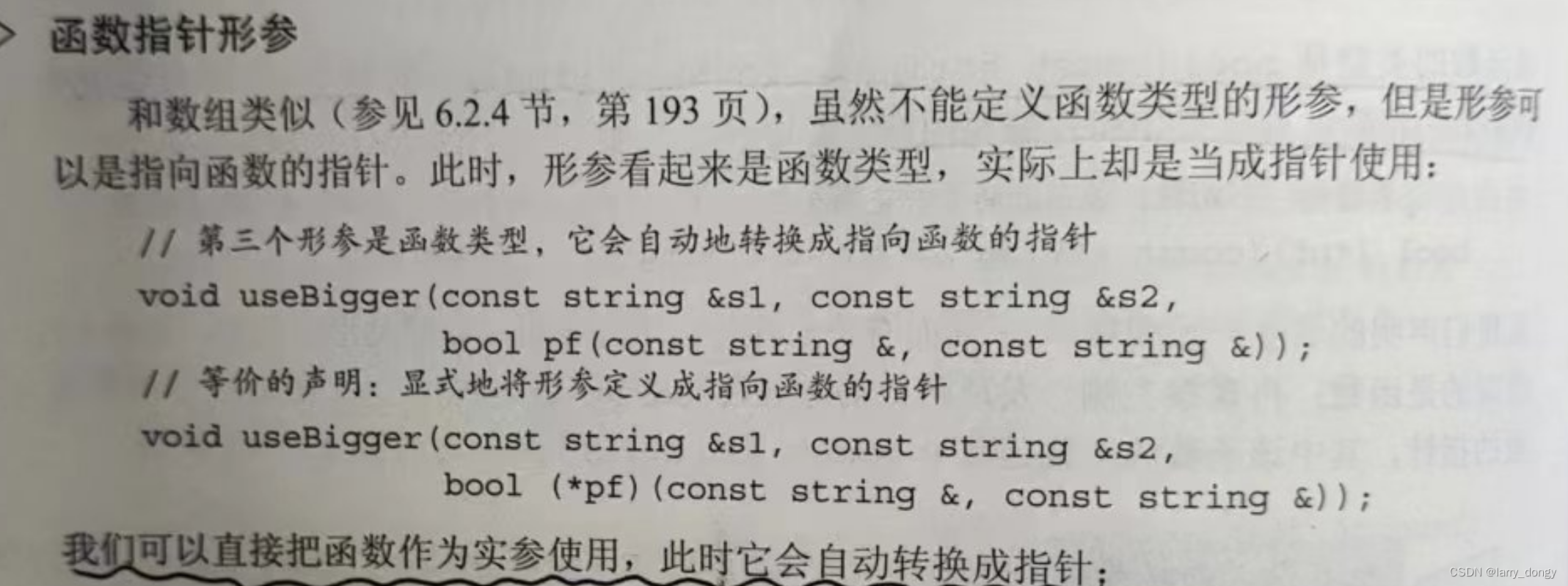
此时,useBigger这个函数接收的第3个参数是一个指针,这个指针指向了一个函数而已。
但是这种写法比较复杂,因此引入typedef关键字:
2.3 typedef 关键字
这里需要提一下typedef关键字。typedef是类型定义的替换,有一个视频讲的很好:
https://www.bilibili.com/video/BV15h4y1M7p2
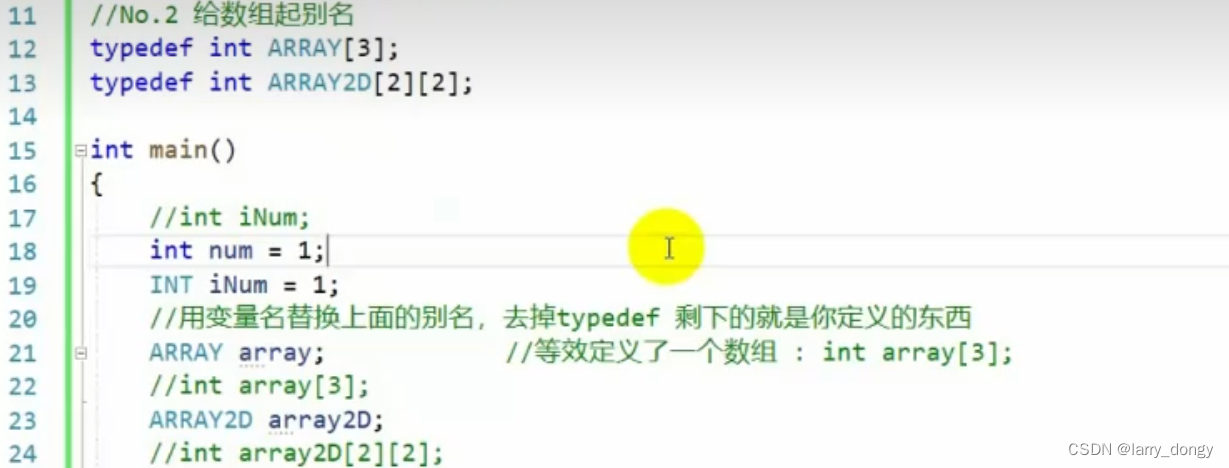
即“用变量名替换上面typedef后面的类型,然后去掉typedef,剩下的就是这一行的定义”。
所以,再结合上面形参是指针的函数,可以写作这样:
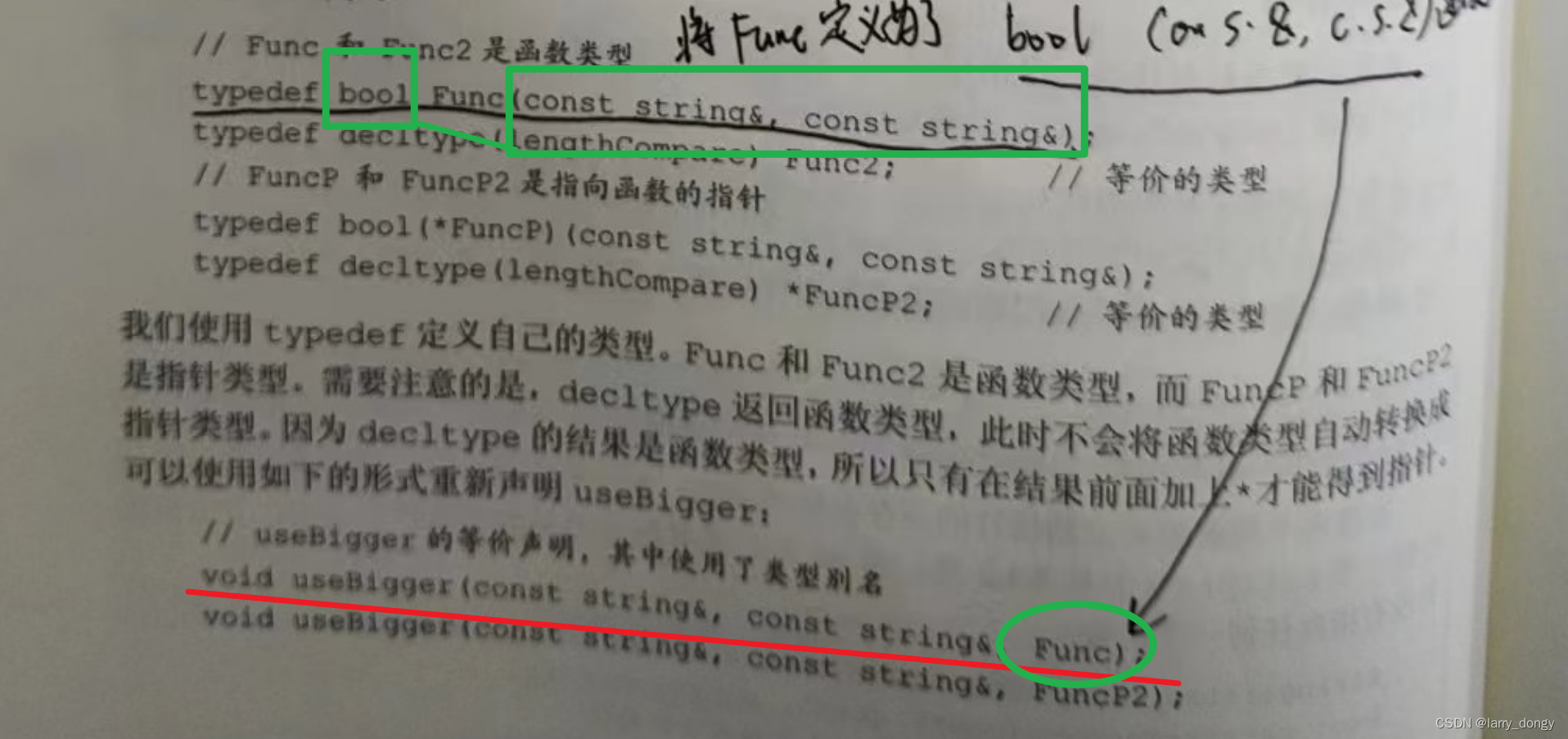
我们把Func换成上方绿色的typedef定义,就能看懂了。
3、回到代码
下面回到PointLio中的代码,我们捋一下思路:
init_dyn_share_modified函数:
在初始化时,将h_dyn_share_modified_1这个“函数指针”和传入的形参h_dyn_share_in共享,即指向的都是h_dyn_share_in这个形参所代表的函数。
而init_dyn_share_modified这个函数的调用,是在laserMapping.cpp中:
kf_input.init_dyn_share_modified(get_f_input, df_dx_input, h_model_input);
即传入的参数是指向h_model_input的指针,而这个h_model_input在Estimator.cpp中定义,就是“IMU做输入量的观测模型”(这里不展开解释,IMU的“输入”/“输出”的区别)。
update_iterated_dyn_share_modified函数:
那么,再往下,初始化完成以后,h_dyn_share_modified_1就指向了h_model_input这个函数,
在接下来update_iterated_dyn_share_modified函数中,h_dyn_share_modified_1(x_, dyn_share)就是相当于调用了h_model_input这个函数。
可以再去看h_model_input这个函数,和h_dyn_share_modified_1函数,传入的形参形式是一致的。所以,我理解的应该是正确的吧。
至此,搞明白了这部分的调用。
小彩蛋
当在代码中自己添加注释,解释这部分函数指针时,我想说“写的真复杂”,结果github的copilot自动补全了我的注释,如下:
 看样子可能不止我一个人被这个函数指针的写法绕进去过吧。
看样子可能不止我一个人被这个函数指针的写法绕进去过吧。















 92
92











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









