






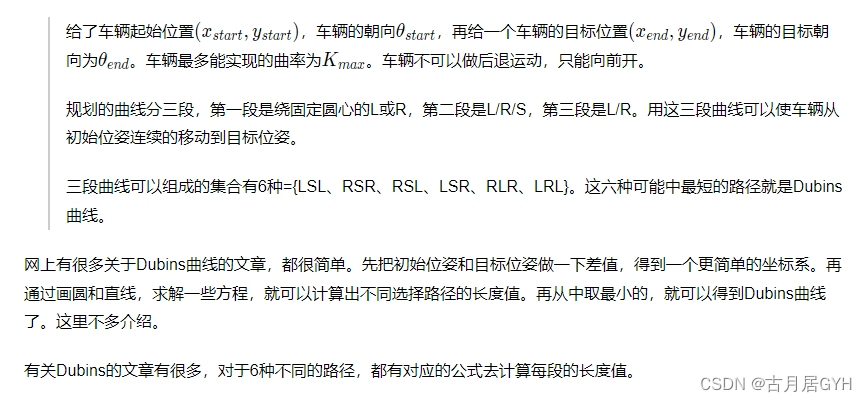
描述
Dubins和RS曲线都是路径规划的经典算法,其中车辆运动学利用RS曲线居多,因此简单介绍Dubins并引出RS曲线。
花了点时间看了二者的论文,并阅读了一个开源的代码。
Dubins曲线
Dubins曲线是在满足曲率约束和规定的始端和末端的切线(进入方向)的条件下,连接两个二维平面的最短路径。它满足给定的运动曲率约束,即转弯半径大于等于给定的半径。
假设顺时针圆周运动为R,逆时针圆周运动为L,直线运动为S。求出Dubins曲线,用任务来表达就是
Reeds-Shepp曲线
1. 原理
“利用倒挡的RS曲线可以比Dubins曲线更优”
论文《Optimal paths for a car that goes both forwards and backwards》提出了Reeds-Shepp曲线。这篇论文由Reeds和Shepp在1990年发表。他们提出了一种能够计算出车辆以固定转弯半径,由一个姿态向另一个姿态运动的最短路径的曲线,即Reeds-Shepp曲线,简称为RS曲线。
对于Dubins曲线,当我们需要车辆位置不变原地掉头时,有如下图的情况:
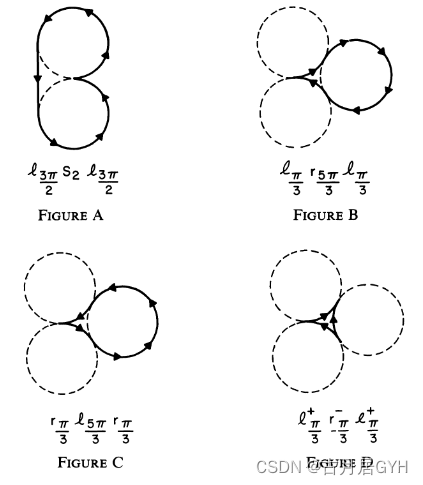
图A和图B都可以达到目标。根据Dubins曲线的定义,我们知道图B是最优的路线,同时存在另外一条曲线图C,也能达到相同的效果。但这和我们平时开车显然不同,因为我们的车辆是可以挂倒挡的。我们选择图D代表的路径,可以更快达到目标。
相较于Dubins曲线,RS曲线有了进一步的约束条件:要求每个点的曲率半径都大于1,同时允许车辆可以后退。当车辆可以倒退时,路径有可能被缩短变得更优,而此时Dubins曲线将不能满足要求。作者对RS曲线的所有可能进行了简化表示,在文中做出了一系列定义,我按照文章的顺序进行讲解。
2. 定义
点击车辆路径规划之Dubins曲线与RS曲线简述 - 古月居可查看全文

















 2258
2258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









